一种ato控制列车过分相的停车点防护方法和系统
1.本技术要求在2020年11月9日在中国专利局递交的、申请号为“202011238218.2”、发明名称为“一种ato自动过分相的停车点安全防护及控制方法”的优先权,其全部内容通过引用结合在本技术中。
技术领域
2.本发明属于本发明涉及轨道控制技术领域,具体涉及一种ato控制列车过分相的停车点防护方法和系统。
背景技术:
3.在铁路运行过程中,列控设备实现通过分相区的输出级位控制及相应的舒适度级位控制,司机需根据经验识别当前车速是否可以通过分相区,若不能通过则需要手动干预提前停车,并结合经验在合适的位置停车。
4.分相区指电气化铁路的无电区间,列车在分相区时断开主断路器,车辆无法施加牵引。在ato控制列车自动过分相控制过程中,列车应以满足分相区的速度顺利通过分相区,然后车辆主断闭合,可以施加牵引。
5.在实际场景中,可能存在停车点在分相区附近的情况。若停车点距离分相区入口较近时,列车起车后,速度可能无法达到分相区要求的速度,导致列车停在分相区。若停车点距离分相区出口速度较近时,可能导致列车无法完整通过分相区,影响铁路安全运营。
6.在ato控制列车自动过分相过程中,由于部分停车点可能设计在分相区附近,导致若遇到特殊场景未考虑分相前后停车场景时,可能出现ato控制列车停在分相区的风险,影响铁路安全运营。
7.基于以上场景,需研究一种ato控制列车过分相的停车点防护方法,自动识别列车在当前车速下是否可以顺利通过分相区,若不能以合适的速度通过分相区或者无法保证列车不停在分相区时,ato控制列车应能够在分相区前合适的距离停车,同时应能保证ato控制列车再次发车后可以正常起车。
技术实现要素:
8.针对上述问题,本发明公开一种ato控制列车过分相的停车点防护方法,所述方法包括:
9.步骤一:获取列车实时信息;
10.步骤二:根据所述列车实时信息,判断ato控制列车是否可以安全过分相;
11.步骤三:如果判断ato控制列车在无法保证过分相条件下,则根据分相区信息、舒适度级位控制和列车前方坡度信息列表,确定满足ato控制列车过分相条件的停车点的位置。
12.进一步地,所述列车实时信息包括列车位置速度信息、距前方分相区入口距离信息、分相区长度信息、ma停车点信息和列车前方坡度信息列表。
13.进一步地,若列车的所述停车点位于分相区前,则需要对停车点的位置进行校验,判断在该停车点下起车能否保证列车完整通过分相区;
14.通过分相区信息、列车前方坡度信息列表和列车起车距离计算新停车点并将计算出的新停车点和原有停车点进行比较,若新停车点在之前,则更新停车点的位置为
15.进一步地,所述新停车点采用动态计算方式如下:首先计算分相区入口最低速度,根据分相区信息可知,分相区出口最低速度v_exit_neu_sec不能低于预定速度,通过实时获取列车前方坡度信息列表ramp、分相区长度l_neu_sec和过分相区后合主断所需距离d,确定分相区入口最低速度v_enter_neu_sec,通过下式计算:
[0016][0017]
其中,a
ramp
为坡度等效加速度;
[0018]
由于分相区前需要提前断主断,计算断主断前列车速度v_enter_neu_sec
′
,如下式所示:
[0019]
v_enter_neu_sec
′
=v_enter_neu_sec a
ramp
t;
[0020]
其中,t为提前断主断时间。
[0021]
进一步地,计算所述断主断前列车速度之后包括以下步骤:
[0022]
分相区断主断前n秒进行舒适度级位调整,舒适度级位见下式:
[0023][0024]
其中,level
jerk
为舒适度级位;level
max
为列车最大输出级位;n<=t,n为自然数,t为提前断主断时间;
[0025]
确定舒适度级位对应的舒适度级位加速度a
jerk
,从而通过下式计算舒适度级位调整下的走行距离d
jerk
:
[0026]
v
jerk
=v_enter_neu_sec a
jerk
t
[0027]
d
jerk
=(v_enter_neu_sec
′2‑
v
jerk2
)/(2*a
jerk
)
[0028]
其中,v
jerk
为舒适度级位调整后的列车速度;
[0029]
起车加速度a
tacc
通过下式计算:
[0030][0031]
其中,为固定起车加速度;
[0032]
计算从静止加速到分相区前舒适度最小通过速度所需距离d1,如下式所示:d1=v
jerk2
/(2*a
tacc
),最后得到列车起车距离为d=d1 d
jerk
,从而得到新停车点
[0033]
进一步地,若列车的所述停车点位于分相区后,根据距前方分相区入口距离和分相区长度,可计算出分相区出口位置,停车点应能充分保证列车列尾通过分相区终点位置,ato控制列车停车点的位置需要满足如下条件:
[0034][0035]
其中,为停车点的位置,l2为配置值,即ato控制列车在ma前停车的距离配置参数,d_ma为ma所在位置,l1为防护距离,d_neu_sec为距前方分相区入口距离,l_neu_sec为分相区长度,d为过分相区后合主断所需距离,l
train
为车长,为列车当前位置。
[0036]
一种ato控制列车过分相的停车点防护系统,包括:
[0037]
获取单元,用于获取列车实时信息;
[0038]
判断单元,用于根据所述列车实时信息,判断ato控制列车是否可以安全过分相;
[0039]
确定单元,用于根据分相区信息、舒适度级位控制和列车前方坡度信息列表,确定满足ato控制列车过分相条件的停车点的位置。
[0040]
进一步地,所述列车实时信息包括列车位置速度信息、距前方分相区入口距离信息、分相区长度信息、ma停车点信息和列车前方坡度信息列表。
[0041]
进一步地,所述确定单元,具体用于:
[0042]
若列车的所述停车点位于分相区前,则需要对停车点的位置进行校验,判断在该停车点下起车能否保证列车完整通过分相区;
[0043]
通过分相区信息、列车前方坡度信息列表和列车起车距离计算新停车点并将计算出的新停车点和原有停车点进行比较,若新停车点在之前,则更新停车点的位置为
[0044]
进一步地,所述确定单元,具体用于:
[0045]
若列车的所述停车点位于分相区后,根据距前方分相区入口距离和分相区长度,可计算出分相区出口位置,停车点应能充分保证列车列尾通过分相区终点位置,ato控制列车停车点的位置需要满足如下条件:
[0046][0047]
其中,为停车点的位置,l2为配置值,即ato控制列车在ma前停车的距离配置参数,d_ma为ma所在位置,l1为防护距离,d_neu_sec为距前方分相区入口距离,l_neu_sec为分相区长度,d为过分相区后合主断所需距离,l
train
为车长,为列车当前位置。
[0048]
本发明提供了一种ato控制列车过分相的停车点防护方法和系统,根据前方ato控制列车停车点的位置、列车位置速度信息、距前方分相区入口距离信息、分相区长度信息、ma停车点信息、列车前方坡度信息列表及列车过分相特性等相关信息实时动态识别列车是否可以顺利通过分相区。若不能满足自动通过分相区条件或者无法保证列车不停在分相区时,ato计算出最高运行效率的分相区前停车点的位置控制列车提前停车。ato通过动态计算方式计算出分相区前合适的距离停车,同时应能保证ato控制列车再次发车后可以正常起车。
[0049]
ato通过距前方分相区入口距离信息、分相区长度信息、ma停车点信息、列车前方坡度信息列表、起车加速度及列车过分相特性等信息动态计算的分相区前停车点的位置需保证ato控制列车再次起车后可以合适的速度通过分相区。
[0050]
ato根据列车前方坡度信息列表和舒适度级位控制,动态计算分相区附近停车点的位置的合理性控制列车通过分相区需结合舒适度及时分要求进行牵引制动级位控制。
[0051]
本方法中提到的起车加速度、提前断主断时间及过分相区后合主断所需距离均可根据车型参数可配置,存贮在ato设备中,可通过配置接口根据车型修改。
[0052]
本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在说明书、权利要求书以及附图中所指出的结构来实现和获得。
附图说明
[0053]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0054]
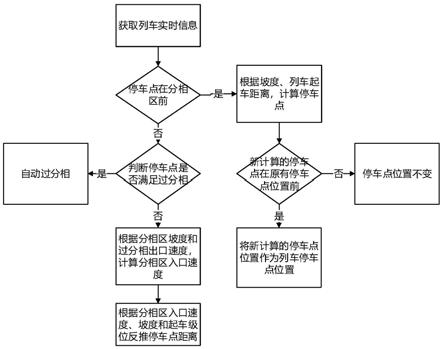
图1示出了过分相安全防护流程图;
[0055]
图2示出了停车点位于分相区前;
[0056]
图3示出了停车点位于分相区后。
具体实施方式
[0057]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地说明,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0058]
本发明提出一种ato控制列车过分相的停车点防护方法,所述方法包括:
[0059]
步骤一:获取列车实时信息;
[0060]
步骤二:根据所述列车实时信息,判断ato控制列车是否可以安全过分相;
[0061]
步骤三:如果判断ato控制列车在无法保证过分相条件下,则根据分相区信息、舒适度级位控制和列车前方坡度信息列表,确定满足ato控制列车过分相条件的停车点的位置。
[0062]
该停车点的位置不仅考虑ato控制列车自动停车的安全防护要求,同时需满足ato控制列车再次起动列车顺利通过分相的最小距离要求,实现最大效率的通行要求,为ato控制列车自动过分相提供了安全防护及控制依据。该防护方法适用于城市轨道交通及铁路等存在自动过分相场景下的安全防护及控制。其中,ato指列车自动驾驶子系统,ato控制列车指配置有列车自动驾驶子系统的列车,且受列车自动驾驶子系统控制。舒适度级位控制指考虑乘客舒适度感受,逐级过渡的控制方式,得到舒适度级位。舒适度级位指考虑舒适度输出的级位。过分相条件指列车通过分相区的分相区出口最低速度高于45km/h,保证列车尾部顺利通过分相区。
[0063]
过分相安全防护流程图如图1所示,具体方案如下:
[0064]
列车实时信息包括列车位置速度信息、距前方分相区入口距离信息、分相区长度信息、ma停车点信息、列车前方坡度信息列表及列车过分相特性信息。其中,分相区信息包括距前方分相区入口距离信息和分相区长度信息;ma指行车许可距离。
[0065]
列车前方坡度信息列表来自于线路数据的行车许可距离ma范围内,包括坡度起始位置、长度和坡度大小。根据停车点的位置判断是否满足过分相条件。
[0066]
1)停车点位于分相区前
[0067]
若列车的停车点位于分相区前,如图2所示,则需要对停车点的位置进行校验,判断在该停车点下起车能否保证列车完整通过分相区。其中,起车指列车发动,列车速度从0开始上升。
[0068]
通过分相区信息、列车前方坡度信息列表和列车起车距离计算新停车点并将计算出的新停车点和原有停车点进行比较,若新停车点在之前,则更新停车点的位置为若新停车点在之后,则停车点不变为停车点列车起车距离指在施加固定起车级位后,能够让列车顺利通过分相区的距离。
[0069]
新停车点采用动态计算方式如下:首先计算分相区入口最低速度,根据分相区信息可知,分相区出口最低速度v_exit_neu_sec不能低于预定速度,通过实时获取列车前方坡度信息列表ramp、分相区长度l_neu_sec和过分相区后合主断所需距离d(配置参数),可反推得到分相区入口最低速度。由于分相区的坡度信息差异较大,因此分相区入口最低速度v_enter_neu_sec存在差异。以分相区不施加制动为例,分相区入口最低速度v_enter_neu_sec如下式所示:
[0070][0071]
其中,a
ramp
为坡度等效加速度;分相区的坡度信息特指在分相区的坡度;分相区的坡度能够通过列车前方坡度信息列表中的线路坡度和分相区信息计算出来或者从atp系统采集;预定速度优选为45km/h。
[0072]
由于分相区前需要提前断主断,计算断主断前列车速度_enter_neu_sec
′
,如下式所示:
[0073]
v_enter_neu_sec
′
=v_enter_neu_sec a
ramp
t
[0074]
其中t为提前断主断时间,可以根据城市轨道交通或铁路运营车辆文件中的配置参数tc_t_ind_ms_off_tra进行配置。配置参数tc_t_ind_ms_off_tra为过分相区前,列车自动保护系统atp向列车发出断开主断命令到实际过分相执行的时间。示例性的,城市轨道交通的提前断主断时间t为3s,铁路的提前断主断时间t为10s。城市轨道交通指地铁、轻轨或有轨电车等,铁路指普速铁路或高速铁路等。断主断指主断路器断开。
[0075]
由于进分相区时,由牵引工况直接转入到惰行工况,容易造成极大冲击感。因此,在考虑舒适度的情况下,分相区断主断前n秒(n<=t),t为提前断主断时间,进行舒适度级
位调整,舒适度级位见下式:
[0076][0077]
其中,level
jerk
为舒适度级位;level
max
为列车最大输出级位;输出级位指列车实际输出的级位。列车参数文件包括车辆延时、列车最大输出级位、列车最小输出级位、牵引速度曲线和制动速度曲线等。
[0078]
根据舒适度级位,确定相应舒适度级位下的舒适度级位加速度a
jerk
,从而通过下式计算舒适度级位调整下的走行距离d
jerk
:
[0079]
v
jerk
=v_enter_neu_sec a
jerk
t
[0080]
d
jerk
=(v_enter_neu_sec
′2‑
v
jerk2
)/(2*a
jerk
)
[0081]
其中,v
jerk
为舒适度级位调整后的列车速度;舒适度级位加速度a
jerk
指不同舒适度级位对应的加速度,由列车参数文件得到;
[0082]
起车加速度a
tacc
通过下式计算:
[0083][0084]
其中,为固定起车加速度,固定起车加速度为已知信息,为列车不同固定起车级位下的加速度;固定起车级位根据列车参数配置,是一个固定值;当前坡度信息指当前列车位置下的坡度,通过列车前方坡度信息列表中的当前坡度信息得到坡度等效加速度a
ramp
;固定起车级位指列车输出固定的级位,根据列车参数文件得到。
[0085]
计算从静止加速到分相区前舒适度最小通过速度所需距离d1,如下式所示:
[0086]
d1=v
jerk2
/(2*a
tacc
)
[0087]
最后得到列车起车距离为d=d1 d
jerk
,从而得到新停车点其中,新停车点与分相区入口的距离为列车起车距离d。
[0088]
2)停车点位于分相区后
[0089]
若列车的停车点位于分相区后,如图3所示,根据距前方分相区入口距离和分相区长度,可计算出分相区出口位置。停车点应能充分保证列车列尾通过分相区终点位置。根据上述信息,ato控制列车停车点的位置需要满足如下条件:
[0090][0091]
其中,为停车点的位置,l2为配置值,优选为25m,即ato控制列车在ma前停车的距离配置参数,ato控制列车行驶时留有余量,ma为最严格目标,不能按照最严格的控制,d_ma为ma所在位置。l1为防护距离,d_neu_sec为距前方分相区入口距离,l_neu_sec为分相区长度,d为过分相区后合主断所需距离,l
train
为车长,为列车当前位置。合主断指主断路器闭合。
[0092]
若判断出ato控制列车不满足通过分相区条件,则需要判断ato控制列车停车点的位置(分相区前停车),该位置能够满足列车起车距离。列车起车距离是指在起车后,列车通过该距离的加速能够满足分相区入口最低速度,在该速度下能够保证列车在坡度影响的同
时,惰行工况下完整出分相区。停车点的位置的设计可参考上述方法,停车点在分相区前,计算停车点方式。根据分相区的出口速度和分相区的坡度信息,反推分相区入口最低速度,再综合考虑起车加速度和列车前方坡度信息列表,计算出停车点的位置。
[0093]
当前存在一些厂家方案设计考虑ato控制列车分相区的停车点设计,但是防护机制采用经验值设计方式,能够实现一定的过分相防护及控制功能,但是影响运行效率,且需要根据车辆及线路调试参数,无法具备通用性。
[0094]
基于上述的一种ato控制列车过分相的停车点防护方法,本发明还提出了一种ato控制列车过分相的停车点防护系统,包括:
[0095]
获取单元,用于获取列车实时信息;
[0096]
判断单元,用于根据所述列车实时信息,判断ato控制列车是否可以安全过分相;
[0097]
确定单元,用于根据分相区信息、舒适度级位控制和列车前方坡度信息列表,确定满足ato控制列车过分相条件的停车点的位置。
[0098]
确定单元,具体用于:
[0099]
若列车的所述停车点位于分相区前,则需要对停车点的位置进行校验,判断在该停车点下起车能否保证列车完整通过分相区;
[0100]
通过分相区信息、列车前方坡度信息列表和列车起车距离计算新停车点并将计算出的新停车点和原有停车点进行比较,若新停车点在之前,则更新停车点的位置为
[0101]
确定单元,具体用于:
[0102]
若列车的所述停车点位于分相区后,根据距前方分相区入口距离和分相区长度,可计算出分相区出口位置,停车点应能充分保证列车列尾通过分相区终点位置,ato控制列车停车点的位置需要满足如下条件:
[0103][0104]
其中,为停车点的位置,l2为配置值,优选为25m,即ato控制列车在ma前停车的距离配置参数,d_ma为ma所在位置,l1为防护距离,d_neu_sec为距前方分相区入口距离,l_neu_sec为分相区长度,d为过分相区后合主断所需距离,l
train
为车长,为列车当前位置。
[0105]
本发明提供了一种ato控制列车过分相的停车点防护方法和系统,根据前方ato控制列车停车点的位置、列车位置速度信息、距前方分相区入口距离信息、分相区长度信息、ma停车点信息、列车前方坡度信息列表及列车过分相特性等相关信息实时动态识别列车是否可以顺利通过分相区。若不能满足自动通过分相区条件或者无法保证列车不停在分相区时,ato计算出最高运行效率的分相区前停车点的位置控制列车提前停车。ato通过动态计算方式计算出分相区前合适的距离停车,同时应能保证ato控制列车再次发车后可以正常起车。
[0106]
ato通过距前方分相区入口距离信息、分相区长度信息、ma停车点信息、列车前方
坡度信息列表、起车加速度及列车过分相特性等信息动态计算的分相区前停车点的位置需保证ato控制列车再次起车后可以合适的速度通过分相区。
[0107]
ato根据列车前方坡度信息列表和舒适度级位控制,动态计算分相区附近停车点的位置的合理性控制列车通过分相区需结合舒适度及时分要求进行牵引制动级位控制。
[0108]
本方法中提到的起车加速度、提前断主断时间及过分相区后合主断所需距离均可根据车型参数可配置,存贮在ato设备中,可通过配置接口根据车型修改。
[0109]
尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

