1.本发明涉及机器人技术领域,具体涉及一种轮腿结合的四足机器人。
背景技术:
2.四足机器人是由机械设计和加工、仿生学、人工智能和计算机控制等多种学科所形成的综合应用,属于机器人研究的热点方向,也是未来机器人重点发展方向之一。
3.现有的四足机器人利用仿生学使其通过仿生腿进行支撑和行走,然而,在行走的过程中,机器人机身不可避免的出现起伏的情况,而在地面不够平整的情况下,这种起伏会被放大,进而影响整个机器人的重心平衡,容易造成机器人倾倒,影响其使用。
4.为了解决上述问题,本发明中提出了一种轮腿结合的四足机器人。
技术实现要素:
5.(1)要解决的技术问题
6.本发明的目的在于克服现有技术的不足,适应现实需要,提供一种轮腿结合的四足机器人,以解决上述技术问题。
7.(2)技术方案
8.为了实现本发明的目的,本发明所采用的技术方案为:
9.一种轮腿结合的四足机器人,包括机器人主体,所述机器人主体的上表面固定连接有集成箱,所述集成箱的正面固定连接有箱盖,所述集成箱的上表面开设有安装孔,且安装孔的内壁固定连接有进气管,所述进气管的内壁固定连接有风扇,所述集成箱的侧面开设有通孔,所述集成箱的内底壁固定连接有平衡组件,所述进气管的底端与平衡组件的上表面固定连接,所述平衡组件的表面固定连接有连通管,所述集成箱内底壁的四角位置开设有平衡孔,所述连通管远离平衡组件的一端与集成箱内底壁固定连接,且连通管与平衡孔相连通。
10.进一步地,所述平衡组件包括与集成箱内底壁固定连接的底座,所述连通管的一端与底座的表面固定连接并贯穿底座的内壁,所述底座的内底壁转动连接有转动块,所述转动块的上表面开设有分流槽,所述转动块的上表面固定连接有顶盖,所述进气管的底端与顶盖的上表面固定连接并贯穿顶盖的下表面,所述转动块的表面开设有凹槽,且凹槽的内壁固定连接有平衡部,所述凹槽的内壁开设有传动槽,所述传动槽的内腔设置有散热部。
11.进一步地,所述平衡部包括与凹槽内壁固定连接的偏心块,所述偏心块的表面开设有滑槽,所述滑槽的内壁滑动连接有沉重环,所述沉重环的内壁固定连接有支架,所述支架的一侧固定连接有平衡弹簧,所述平衡弹簧远离支架的一端与滑槽的内壁固定连接。
12.进一步地,所述滑槽的内壁开设有通气孔,所述分流槽的内底壁开设有通气道,所述通气道呈l型,且通气道与通气孔相连通。
13.进一步地,所述散热部包括转动轴,所述转动轴的两端分别与传动槽的前后侧内壁转动连接,所述转动轴的表面固定连接有齿轮,所述传动槽的后侧内壁滑动连接有移动
杆,所述移动杆的一侧固定连接有齿条,所述齿条与齿轮啮合。
14.进一步地,所述偏心块靠近传动槽的一侧开设有滑孔,所述移动杆远离齿条的一端贯穿滑孔并与支架靠近平衡弹簧的一侧固定连接,所述移动杆的表面与滑孔的内壁滑动连接。
15.进一步地,所述转动块的上表面开设有弧形槽,所述弧形槽的内壁滑动连接有弧形板,所述弧形槽的内底壁固定连接有散热弹簧,所述散热弹簧的顶端与弧形板的下表面固定连接,所述分流槽的内壁开设有散热孔,且散热孔贯穿转动块的表面。
16.进一步地,所述转动轴的表面固定连接有拉绳,所述拉绳远离转动轴的一端贯穿弧形槽的内壁并与弧形板的下表面固定连接。
17.(3)有益效果:
18.a.本发明中,通过偏心块在机器人主体移动过程中重心发生较大偏移时带动转动块转动,使滑槽与下沉位置的连通管完全连通或部分连通,通过沉重环在偏心块位置发生改变时克服平衡弹簧的拉力并沿滑槽移动将通气孔开启,使通气道与滑槽相连通,通过风扇使外界气流依次经过进气管、分流槽、通气道、通气孔、沉重环和滑槽进入连通管,并通过连通管向下喷出,在气流与地面的反作用力下保持机器人主体的稳定性,从而使该轮腿结合的四足机器人解决了机器人运动时起伏造成重心偏移,致使其倾倒的问题。
19.b.本发明中,通过偏心块随机器人主体重心偏移而运动,能够使滑槽与连通管在重心偏移程度越高时连通的部分越多,进而能够使流通的气流越多,通过沉重环在开启通气孔时沿滑槽移动,能够带动支架移动,通过支架带动移动杆向靠近偏心块的方向移动,进而带动齿条移动,通过齿条与齿轮的啮合,使得齿条带动齿轮顺时针转动,进而带动转动轴转动,并将绕卷在转动轴上的拉绳开卷,通过散热弹簧复位推动不再受拉绳约束的弧形板向上移动,将散热孔封闭,使得进入分流槽内的气流全部通过通气道流动,增加连通管喷出的气流的冲击力,以确保气流与地面的反作用力能够保证机器人主体的平衡,从而使该轮腿结合的四足机器人避免了气流过大造成机器人反向倾倒或气流过小无法保持平衡的问题。
20.c.本发明中,通过平衡弹簧在机器人主体处于平衡状态下拉动支架向靠近通气孔的方向移动,进而带动沉重环移动并将通气孔封闭,通过支架带动移动杆向远离偏心块的方向移动,进而带动齿条移动,通过齿条与齿轮的啮合,使得齿条带动齿轮逆时针转动,进而带动转动轴转动,并将拉绳绕卷在转动轴上,通过拉绳绕卷克服散热弹簧的弹力并带动弧形板沿弧形槽向下移动,进而将散热孔开启,进而使分流槽内的气流完全通过散热孔流动至集成箱的内部并通过通孔流向外界,加强集成箱内的空气流动,提高集成箱内用于控制的集成元器件的散热速度,从而使该轮腿结合的四足机器人具有快速散热的效果,避免高温影响机器人的使用寿命。
附图说明
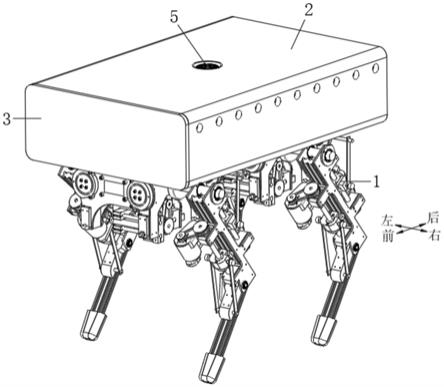
21.图1为本发明的立体结构示意图;
22.图2为本发明集成箱的剖视结构示意图;
23.图3为本发明平衡组件的爆炸结构示意图;
24.图4为本发明转动块的剖视结构示意图;
25.图5为本发明平衡部的爆炸结构示意图;
26.图6为本发明通气道的立体(转动块剖视)结构示意图;
27.图7为本发明散热部的立体(转动块剖视)结构示意图;
28.图8为本发明图7中a处的放大结构示意图;
29.图9为本发明移动杆与支架的连接结构示意图。
30.附图标记如下:
31.1、机器人主体;2、集成箱;3、箱盖;4、进气管;5、风扇;6、平衡组件;61、底座;62、转动块;63、分流槽;64、顶盖;65、平衡部;6501、偏心块;6502、滑槽;6503、沉重环;6504、支架;6505、平衡弹簧;6506、通气孔;6507、通气道;66、传动槽;67、散热部;6701、转动轴;6702、齿轮;6703、移动杆;6704、齿条;6705、弧形板;6706、散热弹簧;6707、散热孔;6708、拉绳;7、连通管。
具体实施方式
32.下面结合附图1
‑
9和实施例对本发明进一步说明:
33.如图1
‑
9所示,一种轮腿结合的四足机器人,包括机器人主体1,机器人主体1的上表面固定连接有集成箱2,集成箱2的正面固定连接有箱盖3,集成箱2的上表面开设有安装孔,且安装孔的内壁固定连接有进气管4,进气管4的内壁固定连接有风扇5,集成箱2的侧面开设有通孔,集成箱2的内底壁固定连接有平衡组件6,进气管4的底端与平衡组件6的上表面固定连接,平衡组件6的表面固定连接有连通管7,集成箱2内底壁的四角位置开设有平衡孔,连通管7远离平衡组件6的一端与集成箱2内底壁固定连接,且连通管7与平衡孔相连通。
34.具体的,集成箱2用于将控制机器人主体1的控制元器件(图中未示出)集成后进行安装放置,进气管4与风扇5配合将外界的气流引入平衡组件6内,平衡组件6与连通管7配合利用风扇5引入的气流进行散热或在机器人主体1重心偏移时保持其平衡,风扇5的型号优选为gh12038m24s,其功率满足在克服平衡组件6的重力下保持机器人主体1的平衡。
35.本实施例中,如图3
‑
4所示,平衡组件6包括与集成箱2内底壁固定连接的底座61,连通管7的一端与底座61的表面固定连接并贯穿底座61的内壁,底座61的内底壁转动连接有转动块62,转动块62的上表面开设有分流槽63,转动块62的上表面固定连接有顶盖64,进气管4的底端与顶盖64的上表面固定连接并贯穿顶盖64的下表面,转动块62的表面开设有凹槽,且凹槽的内壁固定连接有平衡部65,凹槽的内壁开设有传动槽66,传动槽66的内腔设置有散热部67。
36.具体的,底座61用于安装进气管4和转动块62,转动块62用于将除了机器人主体1重心偏移时连接在下沉一侧以外的连通管7进行封闭,分流槽63用于将外界进入的气流分配以便保持平衡或散热,平衡部65用于引入气流使机器人主体1重心偏移时保持平衡,传动槽66用于散热部67的安装,散热部67用于引入气流对集成箱2内的集成控制元器件进行散热。
37.本实施例中,如图5
‑
6所示,平衡部65包括与凹槽内壁固定连接的偏心块6501,偏心块6501的表面开设有滑槽6502,滑槽6502的内壁滑动连接有沉重环6503,沉重环6503的内壁固定连接有支架6504,支架6504的一侧固定连接有平衡弹簧6505,平衡弹簧6505远离支架6504的一端与滑槽6502的内壁固定连接。
38.滑槽6502的内壁开设有通气孔6506,分流槽63的内底壁开设有通气道6507,通气道6507呈l型,且通气道6507与通气孔6506相连通。
39.具体的,偏心块6501和沉重环6503采用密度大的材料制成,优选为钢,转动块62采用密度较小的材料制成,优选为塑料,机器人主体1平衡状态下,沉重环6503将通气孔6506完全封闭,通过偏心块6501在机器人主体1移动过程中重心发生较大偏移时带动转动块62转动,使滑槽6502与下沉位置的连通管7完全连通或部分连通,通过沉重环6503在偏心块6501位置发生改变时克服平衡弹簧6505的拉力并沿滑槽6502移动将通气孔6506开启,使通气道6507与滑槽6502相连通,通过风扇5使外界气流依次经过进气管4、分流槽63、通气道6507、通气孔6506、沉重环6503和滑槽6502进入连通管7,并通过连通管7向下喷出,在气流与地面的反作用力下保持机器人主体1的稳定性,通过偏心块6501随机器人主体1重心偏移而运动,能够使滑槽6502与连通管7在重心偏移程度越高时连通的部分越多,进而能够使流通的气流越多,使得通过的气流量能够满足保持机器人平衡的需求。
40.本实施例中,如图7
‑
9所示,散热部67包括转动轴6701,转动轴6701的两端分别与传动槽66的前后侧内壁转动连接,转动轴6701的表面固定连接有齿轮6702,传动槽66的后侧内壁滑动连接有移动杆6703,移动杆6703的一侧固定连接有齿条6704,齿条6704与齿轮6702啮合。
41.偏心块6501靠近传动槽66的一侧开设有滑孔,移动杆6703远离齿条6704的一端贯穿滑孔并与支架6504靠近平衡弹簧6505的一侧固定连接,移动杆6703的表面与滑孔的内壁滑动连接。
42.转动块62的上表面开设有弧形槽,弧形槽的内壁滑动连接有弧形板6705,弧形槽的内底壁固定连接有散热弹簧6706,散热弹簧6706的顶端与弧形板6705的下表面固定连接,分流槽63的内壁开设有散热孔6707,且散热孔6707贯穿转动块62的表面。
43.转动轴6701的表面固定连接有拉绳6708,拉绳6708远离转动轴6701的一端贯穿弧形槽的内壁并与弧形板6705的下表面固定连接。
44.具体的,通过沉重环6503在开启通气孔6506时沿滑槽6502移动,能够带动支架6504移动,通过支架6504带动移动杆6703向靠近偏心块6501的方向移动,进而带动齿条6704移动,通过齿条6704与齿轮6702的啮合,使得齿条6704带动齿轮6702顺时针转动,进而带动转动轴6701转动,并将绕卷在转动轴6701上的拉绳6708开卷,通过散热弹簧6706复位推动不再受拉绳6708约束的弧形板6705向上移动,将散热孔6707封闭,使得进入分流槽63内的气流全部通过通气道6507流动,增加连通管7喷出的气流的冲击力,以确保气流与地面的反作用力能够保证机器人主体1的平衡,避免了气流过小无法保持平衡的问题,通过平衡弹簧6505在机器人主体1处于平衡状态下拉动支架6504向靠近通气孔6506的方向移动,进而带动沉重环6503移动并将通气孔6506封闭,通过支架6504带动移动杆6703向远离偏心块6501的方向移动,进而带动齿条6704移动,通过齿条6704与齿轮6702的啮合,使得齿条6704带动齿轮6702逆时针转动,进而带动转动轴6701转动,并将拉绳6708绕卷在转动轴6701上,通过拉绳6708绕卷克服散热弹簧6706的弹力并带动弧形板6705沿弧形槽向下移动,进而将散热孔6707开启,进而使分流槽63内的气流完全通过散热孔6707流动至集成箱2的内部并通过通孔流向外界,加强集成箱2内的空气流动,提高集成箱2内用于控制机器人主体1的集成元器件的散热速度,避免高温影响机器人的使用寿命。
45.工作原理:在该轮腿结合的四足机器人使用的过程中,当机器人主体1向前方右侧的位置大幅度倾斜,即集成箱2前方右侧的拐角处下沉时,平衡组件6同时向该侧倾斜,此时,偏心块6501带动转动块62转动,使滑槽6502与下沉位置的连通管7完全连通或部分连通,沉重环6503在其重力作用下克服平衡弹簧6505的拉力并沿滑槽6502向远离通气孔6506的方向移动,将通气孔6506开启,使通气道6507与滑槽6502相连通,风扇5工作使外界气流依次经过进气管4、分流槽63、通气道6507、通气孔6506、沉重环6503和滑槽6502进入连通管7,并通过连通管7向下喷出,在气流与地面的反作用力下保持机器人主体1的稳定性,避免机器人主体1发生倾倒;
46.通过偏心块6501随机器人主体1重心偏移而运动,能够使滑槽6502与连通管7在重心偏移程度越高时连通的部分越多,进而能够使流通的气流越多,使得通过的气流量能够满足保持机器人平衡的需求;
47.在此过程中,沉重环6503带动支架6504向远离通气孔6506的方向移动,支架6504带动移动杆6703移动,移动杆6703带动齿条6704移动,齿条6704带动齿轮6702顺时针转动,齿轮6702带动转动轴6701转动,转动轴6701将绕卷在转动轴6701上的拉绳6708开卷,拉绳6708不再对弧形板6705进行约束,此时,散热弹簧6706复位并推动不再受拉绳6708约束的弧形板6705向上移动,将散热孔6707封闭,使得进入分流槽63内的气流全部进入通气道6507流动,增加连通管7喷出的气流的冲击力,以确保气流与地面的反作用力能够保证机器人主体1的平衡,避免出现气流过小无法保持平衡的现象;
48.当机器人主体1恢复平衡状态后,平衡弹簧6505拉动支架6504向靠近通气孔6506的方向移动,支架6504带动沉重环6503移动并将通气孔6506封闭,同时支架6504带动移动杆6703向远离偏心块6501的方向移动,移动杆6703带动齿条6704移动,齿条6704带动齿轮6702逆时针转动,齿轮6702带动转动轴6701转动,转动轴6701将拉绳6708绕卷在转动轴6701上,拉绳6708绕卷时克服散热弹簧6706的弹力并带动弧形板6705沿弧形槽向下移动,进而将散热孔6707开启,使分流槽63内的气流完全通过散热孔6707流动至集成箱2的内部并通过通孔流向外界,加强集成箱2内的空气流动,提高集成箱2内用于控制机器人主体1的集成元器件的散热速度,避免高温影响机器人的使用寿命;
49.同理,当机器人主体1向其他位置倾斜时,位于该位置附近的连通管7喷出气流,使其保持稳定,从而使该轮腿结合的四足机器人解决了机器人运动时起伏造成重心偏移,致使其倾倒的问题。
50.本发明的实施例公布的是较佳的实施例,但并不局限于此,本领域的普通技术人员,极易根据上述实施例,领会本发明的精神,并做出不同的引申和变化,但只要不脱离本发明的精神,都在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

