1.本发明涉及列车信号控制系统,尤其是涉及一种适用于空轨货运系统的列车控制系统及控制方法。
背景技术:
2.空轨是悬挂式轨道交通系统,轨道在列车上方,一般为单轨,由钢铁或水泥立柱将轨道支撑在空中,空轨系统建设成本低、工程建设速度快且占地面积较小,相比较传统的货物运输方式,空轨货运系统具有良好的发展前景和市场潜力,但由于空轨货运系统采用空中轨道,车辆为悬挂式结构,车辆的智能化、自动化程序也面临极大的挑战。
3.经过检索中国专利公开号cn109353360a公开了一种空轨货车的动力车体,包括:左侧壁、右侧壁、可拆卸顶盖、牵引悬挂组件、车体端部组件、电气室隔壁和动力室隔壁,所述车体端部组件设置在平行间隔的左侧壁和右侧壁的两端而形成车体框架,两个牵引悬挂组件根据牵引和悬挂结构的高度要求设置在左侧壁和右侧壁之间,且分别连接于车体端部组件。但是该现有技术中没有相关智能化控制技术,因此如何实现空轨货运系统运行的高效化、无人化、轨旁设备简约化、室内设备集中化,成为需要解决的技术问题。
技术实现要素:
4.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种适用于空轨货运系统的列车控制系统及控制方法。
5.本发明的目的可以通过以下技术方案来实现:
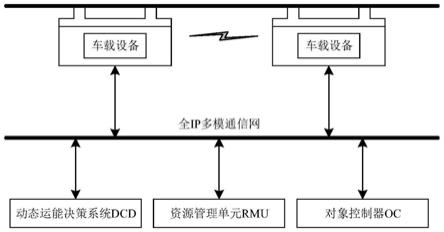
6.根据本发明的一个方面,提供了一种适用于空轨货运系统的列车控制系统,该系统包括车载设备和地面设备,所述的地面设备包括动态运能决策子系统dcd、资源管理单元rmu和对象控制器oc,所述的车载设备、动态运能决策子系统dcd、资源管理单元rmu和对象控制器oc相互之间通过无线通信网连接。
7.作为优选的技术方案,所述的车载设备包括车载主机以及分别与车载主机连接的车载设备外部接口和车载外围设备;
8.所述的车载主机根据车辆数据、行车许可和线路数据实时计算目标距离连续速度控制模式曲线并依曲线对车辆超速进行自动防护,实现测速、定位、车车通信、自主进路触发、无人驾驶、精确停车、人工遥控、主动防碰撞功能。
9.作为优选的技术方案,所述的车载主机包括atp主控单元、ato主控单元、电子标签读取单元、车辆接口单元、测速测距单元和无线传输单元;
10.所述的车载设备外部接口包括列车接口和电源接口;
11.所述的车载外围设备包括速度或加速度传感器、lte天线、电子标签读卡器和激光雷达。
12.作为优选的技术方案,所述的车载设备上电后通过无线网络与资源管理单元rmu建立双向通信,从资源管理单元rmu获取线路电子地图、前方车辆信息、线路数据信息。
13.作为优选的技术方案,所述的车载设备融合速度传感器或加速度传感器,并结合电子地图、虚拟应答器和电子标签,实现车辆自主定位功能,并通过无线通信向资源管理单元rmu实时报告车辆位置。
14.作为优选的技术方案,所述的车载设备从资源管理单元rmu获取到前方车辆信息后主动与前车建立无线通信,依据线路限速、车辆制动性能、前车位置信息实时控制车辆安全运行。
15.作为优选的技术方案,所述的车载设备根据资源管理单元rmu提供的地面道岔状态信息完成自主进路识别,依据资源管理单元rmu提供的当前运行计划自主完成进路申请以及进路释放;
16.当所述的车载设备无线通信功能故障时,根据主动防碰撞装置返回的前方障碍物信息完成车辆的运行防护。
17.作为优选的技术方案,所述的车载设备具备3种工作模式,分别为部分监控模式ps、完全监控模式fs和隔离模式is;
18.当车载设备上电时,执行自检和外部设备测试正确后自动处于部分监控模式ps,部分监控模式ps下,车载设备按照固定速度监控车辆运行;部分监控模式ps下,车载设备负责监控车辆的最高运行速度,操作人员负责监视车辆运行并根据实际情况进行相应处理,确保车辆不进入危险区域;
19.当车辆运行方向已知,线路数据有效且接收到资源管理单元rmu发送的有效道岔信息后,车载设备自转到完全监控模式fs;
20.若在部分监控模式ps下,车载设备累计运行一段距离仍未进入完全监控模式fs,则车载设备输出制动停车;
21.若车载设备发生故障,通过辅助设备将车载设备输出旁路,车载设备转入隔离模式is,不再输出牵引和制动命令到车辆。
22.作为优选的技术方案,所述的动态运能决策子系统dcd对管辖区段内的车辆作业进行指挥和管理,通过资源管理单元rmu实现集中控制,用于实现运能调整;
23.所述的动态运能决策子系统dcd具备行车调度指挥、信号集中控制、自动按图排路、路径规划功能,用于满足车辆的高效运行需求。
24.作为优选的技术方案,所述的动态运能决策子系统dcd实时监视站场设备和车辆的运行状态,实现线路区段透明显示,并根据列车定位信息实现车辆位置的精确跟踪。
25.作为优选的技术方案,所述的动态运能决策子系统dcd预先编制计划并下达至车辆,在车辆运行过程中追踪车辆运行位置和到发时刻,自动描绘车辆实际运行图;能够实时接收来自车辆动态间隔配置方案,并综合考虑其他系统反馈的车辆运行相关信息,动态地调整运行时分并编制合理的车辆运行计划,并将运行计划下达至车载设备。
26.作为优选的技术方案,所述的动态运能决策子系统dcd根据当前任务信息、车辆信息、线路信息、道岔信息,为车辆计算最优路径,并形成运营计划通过资源管理单元rmu,下发至车载设备控制车辆根据计划行车。
27.作为优选的技术方案,所述的资源管理单元rmu根据车辆需求,分配轨旁资源的使用,驱动轨旁资源动作,监测轨旁资源状态并及时采取安全措施,保证行车安全。
28.作为优选的技术方案,所述的资源管理单元rmu将电子地图发送至车载设备,所述
的资源管理单元rmu实现转发运营计划、车辆位置管理、地图校验和下载、线路资源管理、临时限速管理、维护诊断、无线通信功能。
29.作为优选的技术方案,所述的资源管理单元rmu根据车辆正常位置报告,将车辆定位于相关轨道区段中并对该区段进行防护;当车辆无法完成定位或车地通信中断时,所述的资源管理单元rmu根据通信中断前的列车位置对车辆当前位置进行判断,并封锁车辆可能存在的区域,进行安全防护;
30.作为优选的技术方案,所述的资源管理单元rmu根据车辆的资源申请信息,对该申请进行合法和合理性判断,判定通过后,分配相关资源给车载设备;车辆设备获得资源的使用权后,方可行驶通过资源。
31.作为优选的技术方案,所述的资源管理单元rmu与车载设备完成电子地图的校验,当发现车载设备所存储的电子地图不正确时,及时发送新的电子地图至车载设备。
32.作为优选的技术方案,所述的对象控制器oc与资源管理单元rmu之间为双向无线通信,所述的对象控制器oc负责执行资源管理单元rmu发送的道岔动作命令,并将道岔状态反馈给资源管理单元rmu。
33.作为优选的技术方案,所述的动态运能决策子系统dcd包括调度台和中心核心机房去,所述的调度台上显示车辆运行图、战场图、车辆相关信息,并为工作人员提供输入调度命令、限速命令的人机交互接口;所述的中心核心机房包括数据库、应用服务器、通信服务器和接口服务器,其中接口服务器负责完成与资源管理单元rmu的通信。
34.根据本发明的另一个方面,提供了一种用于所述适用于空轨货运系统的列车控制系统的控制方法,包括以下步骤:
35.步骤1:车载设备收到唤醒命令后自行上电后执行车辆自检功能,自检通过后进入部分监控模式ps,设备投入运行;
36.步骤2:车辆启动后,接收来自资源管理单元rmu发送的运行计划,车载设备根据中心发送的出库指令选择运行方向,并按照计划以部分监控模式ps限速运行;
37.步骤3:车辆在经过两个电子标签后,获取定位及方向信息,转入完全监控模式fs运行,根据线路数据、车地无线消息及车车通信结果,计算出行车许可,执行车辆防护,实现无人驾驶功能;
38.步骤4:车辆在区间运行,根据运行计划向资源管理单元rmu申请前方道岔通过进路,得到通过授权后,车辆行车许可延伸,车辆驶过道岔后,向资源管理单元rmu发送进路释放信息,出清通过进路;
39.步骤5:列车区间运行时,根据资源管理单元rmu发送的前车位置和身份信息,自动与前车建立通信,实时获取前车速度、加速度及位置信息,前车根据轨旁信息及前车信息自主计算ma,实现区间移动闭塞追踪运行;
40.步骤6:车辆收到任务结束指令后,进行回库作业,并触发回库进路,车辆入库停车后,结束任务,车辆转入部分监控模式。
41.与现有技术相比,本发明具有以下优点:
42.1)本发明针对空铁集装箱货运系统的应用需求,综合运用速传 电子标签的多源融合车辆自主定位、移动闭塞、电子地图、基于ip的(4g)无线通信、无人驾驶等技术,实现系统运行的高效化、无人化、轨旁设备简约化、室内设备集中化,满足空铁货运系统运行要求
的移动闭塞智能列控系统,可保证空中轨道车辆行车安全,提高空轨货运系统运输效率;
43.2)本发明采用车车通信实现车辆追踪运行,可有效减小车辆追踪间隔,提高运输效率;
44.3)本发明具有结构简单,地面设备较少,可降低施工难度并减少维护工作;
45.4)本发明具备无人驾驶功能,可保证车辆安全快速运行,且降低了人工成本。
附图说明
46.图1为本发明的系统结构示意图;
47.图2为本发明车载设备的结构示意图;
48.图3为本发明dcd设备的结构图;
49.图4为本发明系统的运行流程图。
具体实施方式
50.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都应属于本发明保护的范围。
51.如图1所示,本发明提出的适用于空轨货运系统的列车控制系统车载设备和地面设备构成,地面设备主要由动态运能决策子系统dcd、资源管理单元rmu和对象控制器oc组成,所有子系统间通过全ip多模通信网进行双向无线通信。其中各部分具体如下:
52.第一部分:车载设备主要由atp主控单元、ato主控单元、电子标签读取单元、车辆接口单元、测速测距单元、无线传输单元和天线等组成,根据车辆数据、行车许可和线路数据等基本数据实时计算目标距离连续速度控制模式曲线并依曲线对车辆超速进行自动防护,实现测速、定位、车车通信、自主进路触发、无人驾驶、精确停车、人工遥控、主动防碰撞等功能。
53.第二部分:dcd对管辖区段内的车辆作业进行指挥和管理,通过rmu设备实现集中控制,是实现运能调整的关键设备。具备行车调度指挥、信号集中控制、自动按图排路、路径规划等功能,可满足车辆的高效运行的需求。
54.第三部分:rmu可根据车辆需求,分配轨旁资源的使用,驱动轨旁资源动作,监测轨旁资源状态并及时采取安全措施,保证行车安全。rmu可将电子地图发送至车载设备。rmu主要实现转发运营计划、车辆位置管理、地图校验和下载、线路资源管理、临时限速管理、维护诊断、无线通信等功能。
55.第四部分:oc与rmu之间为双向无线通信,oc负责执行rmu发送的道岔动作命令,并将道岔状态反馈给rmu。
56.所述的第一部分中,车载设备上电后通过无线网络与rmu建立双向通信,从rmu获取线路电子地图、前方车辆信息、线路数据(道岔、临时限速)等信息。
57.所述的第一部分中,车载设备能够融合速度传感器、加速度传感器等多种信息,结合电子地图、虚拟应答器和电子标签,实现车辆自主定位功能,并通过无线通信向rmu实时报告车辆位置。
58.所述的第一部分中,车载设备从rmu获取到前方车辆信息后主动与前车建立无线通信,依据线路限速、车辆制动性能、前车位置等信息实时控制车辆安全运行。
59.所述的第一部分中,车载设备可根据rmu提供的地面道岔状态等地面设备信息完成自主进路识别,依据rmu提供的当前运行计划自主完成进路申请以及进路释放。
60.所述的第一部分中,当车载设备无线通信功能故障时,可根据主动防碰撞装置(激光测距设备、高速摄像头等)返回的前方障碍物信息完成车辆的运行防护。
61.所述的第一部分中,车载设备具备3种工作模式:部分监控模式(ps)、完全监控模式(fs)和隔离模式(is)。当车载设备上电时,执行自检和外部设备测试正确后自动处于部分监控模式。部分监控模式下,车载设备按照固定速度监控车辆运行。部分监控模式下,车载设备负责监控车辆的最高运行速度,操作人员负责监视车辆运行并根据实际情况进行相应处理,确保车辆不进入危险区域。当车辆运行方向已知,线路数据有效且接收到rmu发送的有效道岔信息后,车载设备自转到fs模式。
62.所述的第一部分中,如在ps模式下,车载设备累计运行一段距离仍未进入fs模式,则车载设备输出制动停车。
63.所述的第一部分中,车载设备如发生故障,可通过辅助设备将车载设备输出旁路,车载设备转入隔离模式,不再输出牵引和制动命令到车辆。
64.所述的第二部分中,dcd实时监视站场设备和车辆的运行状态,实现线路区段透明显示,并可以根据列车定位信息实现车辆位置的精确跟踪。
65.所述的第二部分中,dcd可预先编制计划并下达至车辆,在车辆运行过程中可追踪车辆运行位置和到发时刻,自动描绘车辆实际运行图;能够实时接收来自车辆动态间隔配置方案,并可综合考虑其他系统反馈的车辆运行相关信息,动态地调整运行时分并编制合理的车辆运行计划,并将运行计划下达至车载设备。
66.所述的第二部分中,dcd根据当前任务信息、车辆信息、线路信息、道岔信息,为车辆计算最优路径,并形成运营计划通过rmu设备,下发至车载设备控制车辆根据计划行车。
67.所述的第三部分中,rmu设备可根据车辆正常位置报告,将车辆定位于相关轨道区段中并对该区段进行防护。当车辆无法完成定位,或车地通信中断时,rmu根据通信中断前的列车位置对车辆当前位置进行判断,并封锁车辆可能存在的区域,进行安全防护。
68.所述的第三部分中,rmu根据车辆的资源申请信息,对该申请进行合法、合理性判断,判定通过后,分配相关资源给车载设备。车辆设备获得资源的使用权后,方可行驶通过资源。
69.所述的第三部分中,rmu可与车载设备完成电子地图的校验。当发现车载设备所存储的电子地图不正确时,及时发送新的电子地图至车载设备。
70.如图2所示,车载设备由车载主机、车载外围设备和车载设备外部接口组成。车载主机中测速测距单元负责计算车辆速度和运行距离,电子标签读取单元负责处理电子标签读卡器获取到的轨道上的电子标签信息实现列车定位功能,无线传输单元负责实现车载设备与rmu以及前后车之前的无线信息交互,列车接口单元负责采集车辆的相关数据,atp主控单元负责实现车辆的安全运行防护功能,ato负责实现车载设备的自动驾驶功能。
71.如图3所示,dcd设备由调度台和中心核心机房组成,调度台上显示车辆运行图、战场图、车辆相关信息、综合维护台等,并为工作人员提供输入调度命令、限速命令等人机交
互接口。中心核心机房包括数据库、应用服务器、通信服务器、接口服务器,其中接口服务器负责完成与rmu的通信。
72.如图4所示,本发明控制方法主要步骤如下:
73.步骤一:车载设备收到唤醒命令后自行上电后执行车辆自检功能,自检通过后进入ps模式,设备投入运行。
74.步骤二:车辆启动后,接收来自rmu发送的运行计划,车载设备根据中心发送的出库指令选择运行方向,并按照计划以ps模式限速运行。
75.步骤三:车辆在经过两个电子标签后,获取定位及方向信息,转入fs模式运行,根据线路数据、车地无线消息及车车通信结果,计算出行车许可,执行车辆防护,实现无人驾驶功能。
76.步骤四:车辆在区间运行,根据运行计划向rmu申请前方道岔通过进路,得到通过授权后,车辆行车许可延伸。车辆驶过道岔后,向rmu发送进路释放信息,出清通过进路。
77.步骤五:列车区间运行时,根据rmu发送的前车位置和身份信息,自动与前车建立通信,实时获取前车速度、加速度及位置信息,前车根据轨旁信息及前车信息自主计算ma,实现区间移动闭塞追踪运行。
78.步骤六:车辆收到任务结束指令后,进行回库作业,并触发回库进路。车辆入库停车后,结束任务,车辆转入部分监控模式。
79.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

