一种阶梯式爬升装置
1.技术领域:
2.本实用新型属于机电设备技术领域,具体涉及一种阶梯式爬升装置。
3.
背景技术:
4.日常生活中经常出现楼梯搬运重物的情况。很多情况下由于物体过重而不得不增加人力成本,甚至超过人体肌肉承受限度引起肌肉损伤。针对阶梯本身的特点,容易想到采取大直径轮幅来解决搬运问题。然而,大直径的轮幅将导致装置结构在尺寸与重量上大幅度增加,且就重力做功的角度而言不一定能达到省力的目的。因此,本新型采取逆向思考的方式,将轮幅直径减小,并用杆件连接爬升装置车体部分与车轮部分,同时考虑前后车轮行进的同步性,借鉴四杆原理,对前后车轮的杆件部分进行连接。另一方面,引入电机提供助力,从而解决人力成本及可能导致肌肉损伤的问题。故此,设计一种省时省力的阶梯式爬升装置是非常必要的。
5.
技术实现要素:
6.本实用新型的发明目的是提供一种省时省力的阶梯式爬升装置,在前支撑杆和后支撑杆的支撑作用下,前轴连杆和后轴连杆在电机的驱动下同步转动到上面的台阶,并且以车轮与台阶平面的接触点作为回转中心,借助轮胎的摩擦力,继续转动,前支撑杆和后支撑杆同时伴随运动并达到支撑位置,从而实现装置的一次爬升。解决了很多情况下由于物体过重而不得不增加人力成本,甚至超过人体肌肉承受限度引起肌肉损伤的问题。
7.本实用新型采用的技术方案为:一种阶梯式爬升装置,所述爬升装置包括车轮、前支撑杆、后支撑杆、前轴连杆、后轴连杆、车斗、电机、蓄电池、控制器、前轴和后轴;所述前支撑杆和后支撑杆分别垂直地安装在前轴和后轴的两侧,所述前轴连杆和后轴连杆分别倾斜地安装在前轴和后轴的两端,且前轴连杆和后轴连杆与垂直方向成5~10度夹角,前轴连杆和后轴连杆的底端分别安装有车轮;所述前轴和后轴分别安装在车斗的前部和后部,前轴和后轴的从动轮与电机的驱动轮联接,并通过电机驱动,电机通过导线分别与蓄电池和控制器电连接。
8.进一步地,动作一: 前支撑杆和后支撑杆处于垂直状态起支撑作用,前轴连杆和后轴连杆处于倾斜状态,与垂直方向成5~10度夹角;动作二:前轴连杆和后轴连杆在电机的驱动下绕各自的中心轴逆时针转过一定角度(约270度),直至车轮与相应的台阶平面接触;动作三:在电机的驱动下,前轴连杆和后轴连杆以车轮与相应台阶接触点为旋转中心,逆时针转过一定角度(约90度),同时前轴支撑杆和后轴支撑杆相应地发生了移动,最终回到动作一的状态位置。电机驱动前后轴同步转动,前后轴与对应的轴连杆固定。轴支撑杆与对应的前后轴处于间隙接触状态,可以绕轴旋转,同时总是受重力作用最终处于铅锤方向。
9.进一步地,所述车斗内设有隔板。
10.进一步地,所述爬升装置还包括可旋转载物台和载物台调平锁紧盘,所述可旋转载物台通过铰接轴可旋转地安装在车斗的前端,可旋转载物台的侧面设有用于锁紧固定可旋转载物台的载物台调平锁紧盘,可旋转载物台通过穿插在载物台调平锁紧盘的定位孔和可旋转载物台的插孔的销轴进行限位固定。
11.进一步地,所述前轴和后轴的从动轮为链轮,所述电机的驱动轮为链轮,驱动轮通过链条驱动从动轮。
12.进一步地,所述前支撑杆和后支撑杆的长度相同。
13.进一步地,所述前支撑杆和后支撑杆的底端为t型座,且t型座底端倒圆角。前支撑杆和后支撑杆在与台阶平面垂直状态下起支撑车体的作用。支撑杆的下端比杆本身的横截面积大,从而提高了支撑的稳定性,圆角可避免车体行进过程中被台阶卡住。
14.本实用新型的有益效果:提供了一种省时省力的阶梯式爬升装置,在前支撑杆和后支撑杆的支撑作用下,前轴连杆和后轴连杆在电机的驱动下同步转动到上面的台阶,并且以车轮与台阶平面的接触点作为回转中心,借助轮胎的摩擦力,继续转动,前支撑杆和后支撑杆同时伴随运动并达到支撑位置,从而实现装置的一次爬升。解决了很多情况下由于物体过重而不得不增加人力成本,甚至超过人体肌肉承受限度引起肌肉损伤的问题。广泛适用于楼道内,大型建筑物(如礼堂)及大型景点前有阶梯情况下的重物搬运。但不限于楼道内冰箱洗衣机等家电的搬运,肌肉损伤者及老年人进行物体搬运。
15.附图说明:
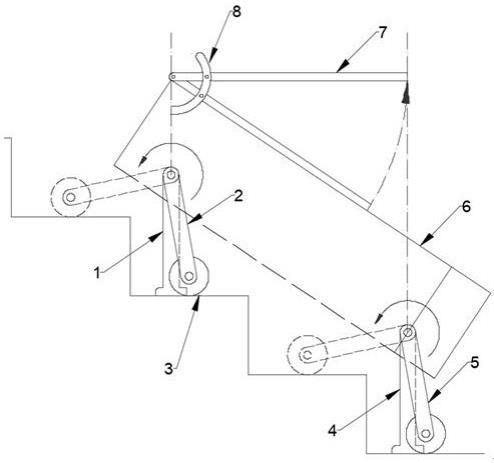
16.图1是爬升装置的主视结构示意图;
17.图2是爬升装置的俯视结构示意图。
18.具体实施方式:
19.实施例一
20.参照图1和图2,一种阶梯式爬升装置,所述爬升装置包括车轮3、前支撑杆1、后支撑杆4、前轴连杆2、后轴连杆5、车斗6、电机9、蓄电池10、控制器11、前轴12和后轴13;所述前支撑杆1和后支撑杆4分别垂直地安装在前轴12和后轴13的两侧,所述前轴连杆2和后轴连杆5分别倾斜地安装在前轴12和后轴13的两端,且前轴连杆2和后轴连杆5与垂直方向成5~10度夹角,前轴连杆2和后轴连杆5的底端分别安装有车轮3;所述前轴12和后轴13分别安装在车斗6的前部和后部,前轴12和后轴13的从动轮与电机9的驱动轮联接,并通过电机9驱动,电机9通过导线分别与蓄电池10和控制器11电连接;所述前轴12和后轴13的从动轮为链轮,所述电机9的驱动轮为链轮,驱动轮通过链条驱动从动轮;所述前支撑杆1和后支撑杆4的长度相同,前支撑杆1和后支撑杆4的底端为t型座,且t型座底端倒圆角。
21.电机功率可以根据以下计算方法计算并进行配置。例如前后轴距离为l,重物与阶梯爬升装置自重合计为g,则电机承受的扭矩为t=g
・
l/2[n
・
m],电机功率为n=t
・
n/975[kw]。电池可按照电机输入需求进行配置。
[0022]
动作实现如下:动作一、前支撑杆和后支撑杆处于垂直状态起支撑作用,前轴连杆和后轴连杆处于倾斜状态,与垂直方向成5~10度夹角;动作二、前轴连杆和后轴连杆在电机的驱动下绕各自的中心轴逆时针转过一定角度(约270度),直至车轮与相应的台阶平面接触;动作三、在电机的驱动下,前轴连杆和后轴连杆以车轮与相应台阶接触点为旋转中心,逆时针转过一定角度(约90度),同时前轴支撑杆和后轴支撑杆相应地发生了移动,最终回到动作一的状态位置。前支撑杆与后支撑杆分别安装与相应的前轴与后轴上,并且在安装上增加了轴承,极大降低与轴的摩擦,从而保证支撑杆总是能够自由灵活地绕轴选装,并且最终保持垂直状态。前轴连杆和后轴连杆具有同样的尺寸,保证了其同步运动过程中车身与阶梯倾斜角度保持平行。车轮采用粗花纹结构的轮胎从而增大与台阶平面的摩擦力。
电机同时驱动前后轴做同步转动,电机由蓄电池提供电力,并由控制器进行转速控制。前支撑杆与后支撑杆上的轴承可以直接与支撑杆进行熔接。
[0023]
实施例二
[0024]
参照图1,在实施例一技术方案的基础上,爬升装置还包括可旋转载物台7和载物台调平锁紧盘8,所述可旋转载物台7通过铰接轴可旋转地安装在车斗6的前端,可旋转载物台7的侧面设有用于锁紧固定可旋转载物台7的载物台调平锁紧盘8,可旋转载物台7通过穿插在载物台调平锁紧盘8的定位孔和可旋转载物台7的插孔的销轴进行限位固定。也可在载物台四周安装防止物品掉落的护栏。车体上配置有载物平台,可绕一端的铰接轴进行旋转,并通过载物台调平锁紧盘进行水平调整及锁紧,可将冰箱、洗衣机等较重的物品放置在载物台上向楼上运输物品,该载物台可以在使用后收回。
[0025]
实施例三
[0026]
在实施例一技术方案的基础上,可在车斗上设置能够放置水桶或煤气罐的载物框,用于向楼上搬运多个桶装矿泉水或煤气罐等比较重的物品。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

