1.本实用新型属于机器人技术领域,尤其是涉及基于臂载视觉的小型穿越机器人。
背景技术:
2.地震、火灾、矿难等事故会给人们的生命及财产造成极大的危害,而且灾难现场情况复杂,在情况不明的情况下,救援人员难以开展救援工作,需要救援机器人具有体积小、质量轻、更灵活的运动穿越性,传统的机器人因体积大、笨重、运作不灵等原因,难以适应此等需要。因此,复杂灾难救援环境对能够实现自主感知周围环境、灵活穿越狭小空间、实时传输救援画面信息的小型穿越机器人提出了需求。
技术实现要素:
3.有鉴于此,本实用新型旨在提出一种基于臂载视觉的小型穿越机器人,在复杂灾难救援环境对能够实现自主感知周围环境、灵活穿越狭小空间、实时传输救援画面信息的能力。
4.为达到上述目的,本实用新型的技术方案是这样实现的:
5.基于臂载视觉的小型穿越机器人,其特征在于:包括机器人本体及控制单元、八个臂
‑
足行走模块、图传模块,每个臂
‑
足行走模块包括三个运动轴、一个缓冲胶垫、一个全向轮、一个视觉模块,所述八个臂
‑
足行走模块均安装于机器人主体及控制单元上,用于驱动机器人爬行,每个臂
‑
足行走模块的末端均安装有缓冲胶垫,可减缓冲击;每个臂
‑
足行走模块的末端均安装有全向轮,用于驱动机器人移动,每个臂
‑
足行走模块的内侧均安装有视觉模块,可采集机器人周围环境信息,视觉模块将采集到的信息反馈机器人本体及控制单元,机器人本体及控制单元下发指令控制臂
‑
足行走模块和全向轮执行相应动作。
6.进一步的,所述的基于臂载视觉的小型穿越机器人,其特征在于:所述八个臂
‑
足行走模块均安装在机器人本体及控制单元上,相邻两足间距角为45
°
,用于驱动机器人行走。
7.进一步的所述的臂
‑
足行走模块,其特征在于:每一个臂
‑
足行走模块包括三个轴,分别为1轴、2轴、3轴,轴与轴通过串联连接,每个轴包含一个旋转运动模块,可单独运动,用于驱动机器人运动。
8.进一步的,所述的基于臂载视觉的小型穿越机器人,其特征在于:所述全向轮为 omni全向轮,用于驱动机器人移动。
9.进一步的,所述的基于臂载视觉的小型穿越机器人,其特征在于:所述视觉模块为景深相机,用于采集机器人周围环境信息。
10.相对于现有技术,本实用新型所述的基于臂载视觉的小型穿越机器人具有以下优势:本实用新型可实现双足式、四足式、六足式移动方式以及轮式和滚动移动方式,搭载了视觉模块,可实现双目、三目、六目视觉采集图像信息。整体独特的臂
‑
足行走模块结构设计,结合视觉模块、实现机器人感知周围环境全方位自主移动。本实用新型具有结构合理,
体积小、质量轻、运动灵活、稳定可靠等特点,可以进行推广应用于复杂环境的搜救任务。
附图说明
11.构成本实用新型的一部分的附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
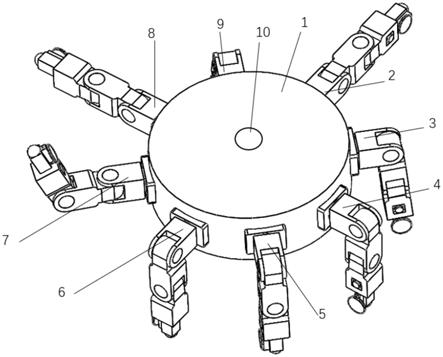
12.图1为本实用新型实施例所述的基于臂载视觉的小型穿越机器人结构示意图;
13.图2为本实用新型实施例所述的臂
‑
足行走模块结构示意图;
14.附图标记说明:
[0015]1‑
机器人主体及控制单元;2
‑
一号臂
‑
足行走模块;3
‑
二号臂
‑
足行走模块;4
‑
三号臂
ꢀ‑
足行走模块;5
‑
四号臂
‑
足行走模块;6
‑
五号臂
‑
足行走模块;7
‑
六号臂
‑
足行走模块;8
‑ꢀ
七号臂
‑
足行走模块;9
‑
八号臂
‑
足行走模块;10
‑
图传模块;2
‑1‑
臂
‑
足行走模块1轴; 2
‑2‑
臂
‑
足行走模块2轴;2
‑3‑
臂
‑
足行走模块3轴;2
‑4‑
缓冲胶垫;2
‑5‑
全向轮;2
‑6‑
视觉模块。
具体实施方式
[0016]
需要说明的是,在不冲突的情况下,本实用新型中的实施例及实施例中的特征可以相互组合。
[0017]
下面将参考附图并结合实施例来详细说明本实用新型。
[0018]
如图1和图2所示,本实用新型包括机器人本体及控制单元(1)、八个臂
‑
足行走模块(2、3、4、5、6、7、8、9)、图传模块(10),每个臂
‑
足行走模块包括三个运动轴(2
‑
1、2
‑
2、2
‑
3)、一个缓冲胶垫(2
‑
4)、一个全向轮(2
‑
5)、一个视觉模块(2
‑
6),所述八个臂
‑
足行走模块(2、3、4、5、6、7、8、9)均安装于机器人主体及控制单元(1) 上,用于驱动机器人爬行,每个臂
‑
足行走模块(2、3、4、5、6、7、8、9)的末端均安装有缓冲胶垫(2
‑
4),可减缓冲击;每个臂
‑
足行走模块(2、3、4、5、6、7、8、9) 的末端均安装有全向轮(2
‑
5),用于驱动机器人移动,每个臂
‑
足行走模块(2、3、4、 5、6、7、8、9)的内侧均安装有视觉模块(2
‑
6),可采集机器人周围环境信息,视觉模块 (2
‑
6)将采集到的信息反馈机器人本体及控制单元(1),机器人本体及控制单元(1)下发指令控制臂
‑
足行走模块(2、3、4、5、6、7、8、9)和全向轮(2
‑
5)执行相应动作。
[0019]
如图2所示,所述的八个臂
‑
足行走模块(2、3、4、5、6、7、8、9),每一个臂
‑ꢀ
足行走模块包括三个轴,分别为1轴(2
‑
1)、2轴(2
‑
2)、3轴(2
‑
3),轴与轴之间通过串联连接,每个臂只有3个自由度,8个臂
‑
足行走模块(2、3、4、5、6、7、8、9) 相互协调作用驱动机器人移动。
[0020]
本实用新型的工作过程如下:基于臂载视觉的小型穿越机器人在工作过程中,可根据不同的搜救环境进行变形,可变形为滚动式移动方式、六足式移动方式、四足式移动方式、双足式移动方式以及多足爬行等移动模式。当机器人需通过狭窄路段时,腿部关节通过配合运动可将机器人变形成盘状,可通过关节摆动并带动腿部旋转实现并完成翻滚式运动形态的转换。当需要双目视觉采集图像信息时,采用两足、三足、六足结构方式运动皆可,控制其他任意两个腿部视觉模块组成双目视觉。当需三目视觉采集图像信息,采用四足式移动方式。当需要六目视觉采集图像信息,采用双足式移动方式。在臂
ꢀ‑
足行走模块(2、3、4、5、6、7、8、9)内测搭载有视觉模块(2
‑
6),图传模块(10) 可将机器人救援画面实时传输给施救人员。
[0021]
本实用新型可实现双足式、四足式、六足式移动方式以及轮式和滚动移动方式,搭载了视觉模块,可实现双目、三目、六目视觉采集图像信息。整体独特的臂
‑
足行走模块结构设计,结合视觉模块、实现机器人感知周围环境全方位自主移动。本实用新型具有结构合理,体积小、质量轻、运动灵活、稳定可靠等特点,可以进行推广应用于复杂环境的搜救任务。
[0022]
需要说明的是,本实用新型所用的控制单元的各部件都是现有产品,各部件之间的连接关系也是本领域技术人员常用的连接关系,属于现有技术,不是本技术的创新点。本实用新型的控制单元中的控制程序属于现有技术,是本领域技术人员常用的控制程序,不是本技术的创新点。本实用新型的视觉模块属于现有技术,不是本技术的创新点。本实用新型的图传模块属于现有技术,不是本技术的创新点。
[0023]
以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

