1.本发明涉及物流配送领域,特别涉及无人智能物流配送车。
背景技术:
2.目前,快递配送均采用人工配送方式,由快递员去快递站装货,装货后去个小区进行配送,一般一个快递员负责多个小区,因此配送时查找快递需要花费较长时间,同时配送过程也比较麻烦,一天紧能配送上百件,目前尚未解决快递配送最后一公里的自动化问题。
技术实现要素:
3.发明目的:为了克服现有技术中存在的不足,本发明提供一种可以对接快递配送站,进行社区自动配送、自动出货的无人智能物流配送车。
4.技术方案:为实现上述目的,本发明的无人智能物流配送车,其特征在于,包括车本体以及存储柜;所述存储柜包括:柜体,其固定设置在所述车本体上;出货模块,其设置在所述柜体的中部位置,所述出货模块包括两自由度坐标轴以及安装在所述两自由度坐标轴上的出货斗组件;存储单元,其固定阵列设置在所述出货模块的两侧。
5.进一步地,所述车本体包括:底座,其设置在所述本体的下侧;主动轮,其数量为2个,对称设置在所述底座中部的两侧;万向轮,其数量为4个,设置在所述底座的四角位置。激光雷达,其数量为2个,分别设置在所述车本体的前后两侧;深度相机,其数量为2个,分别设置在所述激光雷达的上方;超声波传感器,其数量为多个,阵列在所述车本体的周围;
6.进一步地,所述两自由度坐标轴包括竖直设置的y轴模组以及与所述y轴垂直且与所述存储单元的阵列表面平行的x轴模组,所述x轴模组的数量为2个,分别固定在所述柜体内测的上下表面,所述y轴模组安装在所述x轴模组的移动端;所述出货斗组件可在所述x轴模组与所述y轴模组的带动下到达每个所述存储单元的前方。
7.进一步地,所述出货斗组件包括:货斗,其固定设置在所述y轴模组的移动端;电动推杆,其固定设置在所述货斗的下侧,用于推动所述存储单元出货,所述电动推杆为双向可伸缩电动推杆。第一滚筒,其转动阵列连接在所述货斗上。
8.进一步地,在所述柜体阵列设置存储单元的两个侧面设置有卷帘门,在所述柜体与所述卷帘门垂直的两个侧面中的一面设置有移动门。
9.有益效果:本发明的无人智能物流配送车,可以完成分拣站到终端客户的智能化对接,不需要人工进行参与,智能化程度高,配送准确,节约人工。
附图说明
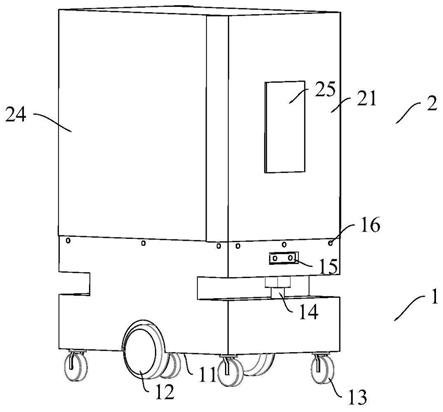
10.附图1为无人智能物流配送车整体视图;
11.附图2为车本体整体视图;
12.附图3为存储柜内部视图;
13.附图4为货斗组件视图;
14.附图5为存储单元斜视图;
15.附图6为存储单元背面视图;
16.附图7为扭簧位置局部剖视图;
17.附图8为上货状态视图;
18.附图9为存储状态视图;
19.附图10为取货状态视图;
20.附图11为出货状态视图。
21.附图中各附图标记表示的零部件名称如下:
[0022]1‑
车本体、2
‑
存储柜、11
‑
底座、12
‑
主动轮、13
‑
万向轮、14
‑
激光雷达、15
‑
深度相机、16
‑
超声波传感器、21
‑
柜体、22
‑
出货模块、23
‑
存储单元、24
‑
卷帘门、25
‑
移动门、221
‑
两自由度坐标轴、222
‑
出货斗组件、231
‑
栈板组件、232
‑
传动组件、2211
‑
y轴模组、2212
‑
x轴模组、2221
‑
货斗、2222
‑
电动推杆、2311
‑
栈板本体、2312
‑
滚筒、2313
‑
档杆、2321
‑
齿条、2322
‑
齿轮、2323
‑
转轴、2324
‑
第一弹簧、2325
‑
阻挡摇杆、2326
‑
扭簧、2327
‑
摇杆、2328
‑
推杆、2329
‑
第二弹簧。
具体实施方式
[0023]
下面结合附图对本发明作更进一步的说明。
[0024]
如附图1、3所示的无人智能物流配送车,包括车本体1以及存储柜2;所述存储柜2包括:柜体21,其固定设置在所述车本体1上;出货模块22,其设置在所述柜体21的中间位置;所述出货模块22包括两自由度坐标轴221以及安装在所述两自由度坐标轴221上的出货斗组件222;存储单元23,其固定阵列设置在所述出货模块22的两侧,在所述柜体21阵列设置存储单元23的两个侧面设置有卷帘门24,在所述柜体21与所述卷帘门24垂直的两个侧面中的一个设置有移动门25。
[0025]
进一步地,如附图3所示,所述两自由度坐标轴221包括竖直设置的y轴模组2211以及与所述y轴2211垂直且与所述存储单元23的阵列表面平行的x轴模组2212,所述x轴模组2212的数量为2个,分别固定在所述柜体21内侧的上下表面,所述y轴模组2211安装在所述x轴模组2212的移动端。
[0026]
进一步地,如图4所示,出货斗组件222包括:货斗2221,其固定设置在所述y轴模组2211的移动端;电动推杆2222,其固定设置在所述货斗2221的下侧,用于推动所述存储单元23出货,所述电动推杆2222为双向伸缩杆。所述出货斗组件222可在所述x轴模组2212与所述y轴模组2211的带动下到达任意一个存储单元23前,将货物取出。
[0027]
进一步地,如图5
‑
7所示,所述存储单元23包括栈板组件231以及传动组件232,所述栈板组件231包括:
[0028]
栈板本体2311、多个阵列的与所述栈板本体2311转动连接的滚筒2312以及固定在所述栈板本体2311上与货物运输方向平行的两侧面的档杆2313,所述档杆2313在所述栈板本体2311的进货端具有下限位部以及上限位部,在所述栈板本体2311的出货端具有下限位部以及上限位部。
[0029]
所述传动组件232包括:可相对所述栈板本体2311沿货物运输方向移动的齿条2321、与所述齿条2321啮合且可相对所述栈板本体2311旋转的齿轮2322、与所述齿轮2322
固定连接且可相对所述栈板本体2311旋转的转轴2323、用于使所述齿条2321复位的第一弹簧2324、与所述转轴2323转动连接且具有阻挡部的阻挡摇杆2325、一端与所述转轴2323固定连接另一端与所述阻挡摇杆2325固定连接的扭簧2326、固定在所述转轴2323两端的两个摇杆2327、两端与两个所述摇杆2327滑动配合的推杆2328、以及套合在所述摇杆2327上使所述推杆2328有远离所述摇杆2327旋转中心运动趋势的第二弹簧2329。
[0030]
该实施例中,如图9所示,当智能物流配送车前往目的地的过程中,货物存储在存储单元23上,推杆2328与阻挡摇杆2325的阻挡部分分别位于存储单元23的进货端与出货端;如图10所示,当智能物流配送车到达目的地,需要取件时,所述货斗组件222在两自由度坐标轴221的驱动下,到达需要取件的存储单元23前,电动推杆2222向货物运动反方向推动所述齿条2321,进而通过齿轮2322带动转轴2323转动,转轴2323带动摇杆2327向货物运输方向转动,最终在摇杆2327以及第二弹簧2329的双重作用下推杆2328沿档杆2313运动,同时转轴2323通过扭簧2326带动阻挡摇杆2325转动到达档杆2313出货端的下限位,此时推杆2328将货物推出到货斗2221中;如图11所示,取件完成后,动移门25打开,货物由货斗组件222在两自由度坐标轴221的驱动下运出柜体21外部;同时,齿条2321在第一弹簧2324的作用下复位,且通过齿轮2322带动转轴2323转动,转轴2323带动摇杆2327向货物运输反方向转动,最终在摇杆2327以及第二弹簧2329的双重作用下,推杆2328沿档杆2313运动复位;当需要上货时,如图8所示,卷帘门24打开,存储单元23对接快递分拣站的上货机构,上货机构具有可伸缩推杆,可伸缩推杆推动齿条2321向货物运动方向移动,进而通过齿轮2322带动转轴2323转动,转轴2323带动摇杆2327向货物移动反方向转动,最终在摇杆2327以及第二弹簧2329的双重作用下推杆2328到达档杆2313进货端的下限位,同时转轴2323通过扭簧2326带动阻挡摇杆2325转动到达档杆2313出货端的上限位,如此货物可自由进入存储单元23。上货完成后,如图9所示,可伸缩推杆作用力消失,齿条2321在第一弹簧2324的作用下复位,齿条2321通过齿轮2322带动转轴2323旋转,转轴2323带动摇杆2327向货物移动方向转动,最终最终在摇杆2327以及第二弹簧2329的双重作用下,推杆2328到达档杆2313进货端的上限位部。
[0031]
进一步地,如图2所示,车本体1包括:底座11,其设置在所述本体1的下侧;主动轮12,其数量为2个,对称设置在所述底座11中部的两侧;万向轮13,其数量为4个,设置在所述底座11的四角位置。激光雷达14,其数量为2个,分别设置在所述车本体1的前后两侧;深度相机15,其数量为2个,分别设置在所述激光雷达14的上方;超声波传感器16,其数量为多个,阵列在所述车本体1的周围。
[0032]
激光雷达14以及深度相机,用于为无人智能物流配送车自主行走提供数据,实现自主建图、自主导航功能,超声波传感器16可以使无人智能物流配送车规避障碍。
[0033]
以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

