1.本实用新型涉及机器人技术领域,具体涉及一种行走机器人用传动机构。
背景技术:
2.随着科技的发展进步,机器人在各行各业的应用也越来越广泛。我国西南地区山体复杂,泥石流等自然灾害频发,在发生自然灾害或其他事故需要救援时,行动灵活、功能多样的机器人能够发挥重要的作用。现有的行走机器人用传动机构多适用于平地路面,在崎岖的山路上行走时,容易发生晃动,甚至倾倒,影响行走机器人用传动机构的稳定性,其结构部件在经受多次震动后容易损坏,缩短了行走机器人用传动机构的使用寿命。
技术实现要素:
3.本实用新型的目的在于提供一种行走机器人用传动机构,该行走机器人用传动机构适用于山区,在崎岖的山路上行走时,具有较强的稳定性,不易发生晃动,有效延长了使用寿命。
4.为实现上述目的,本实用新型采用了以下技术方案:
5.一种行走机器人用传动机构包括依次设置的伺服电机、花键轴、十字万向联轴器一、连接轴一、十字万向联轴器二、连接轴二、十字万向联轴器三、连接轴三和连接轮;所述伺服电机的输出轴与花键轴的一端相连,花键轴的另一端通过十字万向联轴器一与连接轴一的一端相连,连接轴一的另一端通过十字万向联轴器二与连接轴二的一端相连,连接轴二的另一端通过十字万向联轴器三与连接轴三的一端相连,连接轴三的中段套设有轴承一;所述连接轮安装在连接轴三的另一端。
6.进一步的,所述伺服电机的输出轴通过联轴器与花键轴的一端相连。
7.进一步的,所述伺服电机的输出轴上安装有行星减速器。
8.进一步的,所述连接轴一倾斜设置。
9.进一步的,所述伺服电机安装在电机安装座上。
10.由以上技术方案可知,本实用新型安装在行走机器人上使用,装配有本实用新型的行走机器人适用于山区,在崎岖的山路上行走时,具有较强的稳定性,不易发生晃动,有效延长了使用寿命。
附图说明
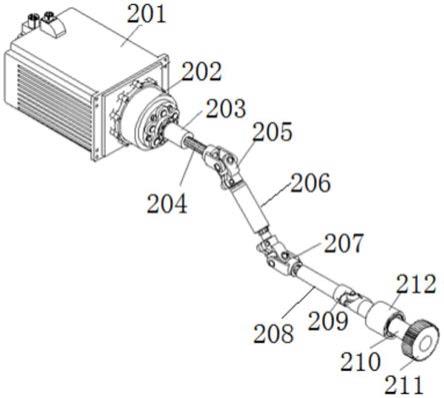
11.图1是本实用新型的结构示意图;
12.图2是本实用新型的使用状态示意图一;
13.图3是本实用新型的使用状态示意图二;
14.图4是本实用新型的使用状态示意图三;
15.图5是本实用新型的使用状态示意图四;
16.图6是行走机构、传动机构和转向机构的装配结构示意图;
17.图7是主气缸一、主气缸二、膝盖运动球、小腿运动气缸与小腿支撑件二的装配结构示意图;其中膝盖运动球部位为剖视;
18.图8是转向机构的结构示意图;
19.图9是减震机构的结构示意图;
20.图10是减震机构的爆炸结构示意图,其中转向主动座部位为剖视。
21.其中:
22.100、行走机构,101、主气缸一,102、主气缸二,103、连接杆,104、膝盖运动球,105、小腿运动气缸,106、小腿支撑件一,107、小腿支撑件二,108、脚板,109、球体,110、运动槽一,111、运动槽二,112、运动球一,113、运动球二,114、轴承二,115、轴承三,200、传动机构,201、伺服电机,202、行星减速器,203、联轴器,204、花键轴,205、十字万向联轴器一,206、连接轴一,207、十字万向联轴器二,208、连接轴二,209、十字万向联轴器三,210、连接轴三,211、连接轮,212、轴承一,300、转向机构,301、电机,302、蜗轮,303、蜗杆,304、牵引块一,305、牵引块二,306、折叠块,307、电机安装座,308、限位板,309、轴承四,400、减震机构,401、主减震,402、副减震一,403、副减震二,404、转向主动座,405、转向牵引壳,406、背板,407、上减震板,408、下减震板,409、主减震上固定座,410、副减震上固定座,411、转向主动座体,412、运动槽三,413、运动槽四,414、运动球三,415、运动球四,601、支杆。
具体实施方式
23.下面结合附图对本实用新型做进一步说明:
24.如图1所示的一种行走机器人用传动机构包括依次设置的伺服电机201、花键轴204、十字万向联轴器一205、连接轴一206、十字万向联轴器二207、连接轴二208、十字万向联轴器三209、连接轴三210和连接轮211。本实用新型与行走机构100、转向机构300和减震机构400共同组成如图2
‑
图6所示的行走机器人,该行走机器人适用于在崎岖山路上行走,用于营救受困人员。行走机构,类似于腿部与脚部结构,用于行走;传动机构和转向机构,用于控制行走机构的运动;减震机构,用于在行走过程中起到减震作用。
25.在本实用新型所述的传动机构中,伺服电机201的输出轴上安装有行星减速器202。所述伺服电机201的输出轴通过联轴器203与花键轴204的一端相连,花键轴204的另一端通过十字万向联轴器一205与连接轴一206的一端相连,连接轴一206的另一端通过十字万向联轴器二207与连接轴二208的一端相连,连接轴二208的另一端通过十字万向联轴器三209与连接轴三210的一端相连,连接轴三210的中段套设有轴承一212。所述连接轴一206倾斜设置。十字万向联轴器三209,是为了转向的时候可以做到腿部转,而主体不转,使坐在上方的受伤人员更加舒适。所述连接轮211安装在连接轴三210的另一端;所述主气缸二102的上端套设在轴承一212的外侧,所述连接杆103的上端与连接轮211枢接相连。伺服电机201安装在电机安装座307上。所述转向牵引壳405罩设在主气缸二102的上端的外侧。
26.伺服电机201工作,带动花键轴204转动,花键轴204带动连接轴一206转动,连接轴一206带动连接轴二208转动,连接轴二209带动连接轴三210转动,连接轴三210带动轴承一212和连接轮211转动。通过采用十字万向联轴器连接各个轴,能够在行走机构在崎岖路面行走时,避免传动机构中的各个部件受到震动冲击,保证传动机构中各个部件的工作稳定性,延长了传动机构中各个部件的使用寿命。主气缸一101与主气缸二102的气缸杆做伸缩
运动时,二者对膝盖运动球的共同作用力在小腿支撑件的中心轴线上,实现抬腿和放腿的动作。由于连接杆103与连接轮211枢接相连,当连接轮211转动时,会带动连接杆运动,进而给小腿支撑件二107一个作用力,使与连接杆的下端相连的小腿支撑件二107运动。由于小腿支撑件二的上端与膝盖运动球呈球面副连接,因此,在连接杆的带动下,小腿支撑件二107会在一定角度范围内转动,对小腿的抬腿和放腿动作起到辅助作用。小腿运动气缸105、小腿支撑件一106和脚板108形成一个翘板结构,小腿运动气缸105的气缸杆伸长,会驱动小腿支撑件一105的上端向下运动,设置在小腿支撑件一105底部的脚板108会抬起;小腿运动气缸105的气缸杆缩回,会驱动支撑件一105的上端向上运动,设置在小腿支撑件一105底部的脚板108会放下。由于本实用新型所述的行走机器人用传动机构的主要用途是去崎岖山地进行受伤人员的营救,因此,本实用新型设计了传动机构来带动连接杆的运动,这样即使机器人在泥泞地区发生脚板下陷,也可以通过传动机构带动连杆配合多个气缸的运动,能够很轻松地离开,使整个机器人的运动更加协调。
27.从图2
‑
图6中可以看出,传动机构200、腿部结构和减震机构400的数量相等,三者一一对应设置。一个转向机构对应左右对称设置的两个腿部结构。
28.具体地说,所述行走机构100包括一对腿部结构。每个腿部结构对应一个传动机构200。所述腿部结构包括主气缸一101、主气缸二102、连接杆103、膝盖运动球104、小腿运动气缸105、小腿支撑件一106、小腿支撑件二107和脚板108。所述主气缸一101的下端与安装在膝盖运动球104的外壁上的安装支架一相连。所述主气缸二102的下端与膝盖运动球104呈球面副配合。所述连接杆103的下端与小腿支撑件二107的中段相连。所述小腿运动气缸105的上端通过旋转轴与安装在膝盖运动球104的外壁上的安装支架二转动相连,下端通过旋转轴与小腿支撑件一106的上端转动相连,这样在旋转时会有一个牵引辅助的力量,不会因作用力过大而撕裂,确保了结构的稳定性。通过设置安装支架一和安装支架二来连接主气缸一、小腿运动气缸与膝盖运动球,而不是直接将主气缸一、小腿运动气缸直接插入膝盖运动球内,是为了减少膝盖运动球的承受应力,延长膝盖运动球的使用寿命,同时也为了更换零件方便。所述小腿支撑件一106的下端与脚板108的顶部固定相连或转动相连。所述小腿支撑件二107的上端与膝盖运动球104呈球面副配合,下端与小腿支撑件一106的中段通过轴承三115转动相连。如图6所示,所述膝盖运动球104包括球体109和分别开设在球体内部的运动槽一110与运动槽二111;所述主气缸二102的下端设有运动球一112,所述运动球一112嵌入安装在运动槽一110内且与运动槽一110呈球面副配合;所述小腿支撑件二107的上端设有运动球二113,所述运动球二113嵌入安装在运动槽二111内且与运动槽二111呈球面副配合。两个腿部结构中的主气缸一的上端分别通过一个轴承二与支杆601的两端转动相连;所述轴承二套设在支杆601上。运动槽一110与运动球一112球面副连接,运动槽二111与运动球二113球面副连接,一方面能够对主气缸二102以及小腿支撑件二107的运动范围进行限制,另一方面还能够使行走机构的运动更加灵活自如。
29.采用本实用新型所述的传动机构的行走机器人适用于崎岖山路,主要用于在发生各种灾害时运输伤病人员或贵重物品。为了确保运输伤病人员或贵重物品过程中的安全性和稳定性,该行走机器人的腿部结构进行了创新性地设计。
30.首先,现有技术中的机械狗采用了大量的液压装置和电气控制装置,虽然这提高了机械狗运动过程的可控性,但由于山路地区各种干扰比较多,当受到振动、风力或磁场等
外界干扰时,液压装置和电气控制装置容易失控,影响机械狗的正常工作。倘若在发生灾害时采用该类型的机械狗进行人员抢救,会存在被崎岖山路困住使受伤人员二次受困的风险。本实用新型中的腿部结构将电气控制结构转化为大量的机械结构,这样在受到振动、风力或磁场等外界干扰时,以机械结构为主体的腿部结构运动不会受到影响,运动过程更加稳定,适于在崎岖山路环境下进行受伤人员的运送。本实用新型所述的行走机器人用传动机构包括两个腿部结构,可以采用连接支架将多个本实用新型连接到一起,形成多足行走机器人用传动机构,这样与地面的接触面积更大,运动稳定性更高,在崎岖山路上行走时,不容易摔倒,对位于上方的受伤人员起到了保护作用,避免受伤人员随机器人一同摔倒受到二次伤害。
31.其次,本实用新型中腿部结构模仿人体腿部结构,分为大腿、膝盖、小腿和脚板四个部位,主气缸一和主气缸二组成大腿,膝盖运动球作为膝盖,小腿运动气缸、小腿支撑件一和小腿支撑件二作为小腿。采用双边放置的主气缸一和主气缸二来构成大腿,通过对主气缸一和主气缸二的运动进行控制,能够使小腿部位受到不同方向和大小的作用力,使小腿部位的运动形式更加多样化,满足在崎岖山路上运送伤病员的需求。通过设置膝盖运动球作为膝盖,并使膝盖运动球与主气缸一、小腿运动气缸之间的连接方式为球面副连接,这样既能够使机器人的腿部结构运动更加灵活,又能够通过运动槽的限位作用,使机器人的腿部结构只能在一定行程范围内进行运动,确保在崎岖山路上行驶的稳定性,避免摔倒。而且本实用新型所述的行走机器人用传动机构在崎岖山路上行走受到震动时,膝盖运动球的设置以及其与大腿、小腿部位的连接方式,能够缓解一部分振动,确保坐在上方的伤病人员的安全。
32.再次,现有技术中的机器狗等机器人多采用轴承作为膝关节,且采用链条传动结构,采用软传动的链条固定是卡住两边齿轮,两边给中间一个拉紧力,作用在轴承上面,而且其余结构的支撑都在轴承上面,这样设计使轴承受到过多的作用力,容易损坏。行走机器人采用膝盖运动球作为腿部结构的膝关节,通过球面副的连接方式将作用力分散,避免膝关节受到较集中的作用力;而且行走机器人的腿部结构没有采用链条传动,而是采用连接杆进行传动,将连杆连接的地方放在下面的小腿支撑件二上面,这样即便是两边向中间施加一个拉紧力,也会由连接杆承担一部分,减少膝盖运动球的应力集中,延长膝盖运动球的寿命。此外,在主气缸一、主气缸二、小腿运动气缸和连杆及传动机构的多重作用下,能够使腿部结构的运动更加灵活,在行走机器人在崎岖山路上行走时,整体运动更加协调、更加灵活便利,不会陷在低洼处走不出来。
33.如图8所示,所述转向机构300包括电机301、蜗轮蜗杆结构和牵引结构;所述蜗轮蜗杆结构包括安装在电机301输出轴上的蜗轮302和与蜗轮302传动配合的蜗杆303;所述牵引结构的数量为两个,分别与一对腿部结构中的两个腿部结构一一对应;所述牵引结构的一端连接到蜗杆303的端部,另一端与减震机构或传动机构相连。所述牵引结构包括牵引块一304、牵引块二305和折叠块306;所述折叠块306采用合页结构,包括转动相连的合页结构部一和合页结构部二;所述牵引块一304的下端通过轴承四309与蜗杆303的端部相连,上端与牵引块二305的一端相连,牵引块二305的另一端与合页结构部一相连,合页结构部二与转向主动座405相连。
34.电机301工作,带动蜗轮转动,与蜗轮啮合相连的蜗杆沿其轴向左右移动,设置在
蜗杆两端的牵引结构随蜗杆一同左右移动,进而带动与牵引结构相连的转向主动座404一同运动,由于转向主动座与减震支座之间通过球面副连接,那么,在转向主动座随蜗轮蜗杆机构运动时,就能够实现行走机构的转向。本实用新型采用蜗轮蜗杆结构来进行转向牵引,可以提高行走机器人用传动机构的转向精度和准确度,这样在崎岖山地上行驶时,会更加安全。而且在行走机器人在崎岖路面行走时,容易发生晃动,通过将折叠块设计为合页结构,这样即使行走机器人发生晃动,在行走机器人受到的振动力向上传递的过程中,两个合页结构部发生相对移动,避免振动力传递到其他刚性连接的部件上,对其他部件造成损坏。
35.如图9和图10所示,所述减震机构400包括减震支座、主减震401、副减震、转向主动座404和转向牵引壳405。所述主减震和副减震均采用弹簧或阻尼器。所述主减震401的数量为一个,副减震的数量为两个,分别为副减震一402和副减震二403,两个副减震对称设置在主减震401下方的两侧。
36.所述减震支座包括背板406、自上向下依次设置在背板406外侧壁上的上减震板407与下减震板408以及依次设置在背板406上方的主减震上固定座409和副减震上固定座410;所述主减震401的上端安装在主减震上固定座409上,下端安装在上减震板407上;所述副减震的上端安装在副减震上固定座410上,下端安装在下减震板408上;所述上减震板407的一端连接在背板406上,另一端与转向主动座404呈球面副配合;所述下减震板408的一端连接在背板406上,另一端与转向主动座404呈球面副配合;所述转向牵引壳405与转向主动座404相连。所述背板406的内侧壁上安装有电机安装座307;所述电机301安装在电机安装座307上;所述主减震上固定座409安装在电机安装座307的顶部,将主减震上固定座409安装在电机安装座上,而不是和减震支座设计为一体,是为了确保整个结构之间的连接的稳定性,避免在多次剧烈运动过程中散架。所述电机安装座307的上方设有限位板308,所述限位板308的端部连接在主减震上固定座409上,限位板308,用于确保电机301和伺服电机201安装结构的稳定性。所述副减震上固定座410安装在电机安装座307的侧壁上。所述转向主动座404包括转向主动座体411和依次开设在转向主动座体411上的运动槽三412与与运动槽四413;所述上减震板407的端部设有运动球三414,所述运动球三414嵌入安装在运动槽三412内且与运动槽三412呈球面副配合;所述下减震板408的端部设有运动球四415,所述运动球四415嵌入安装在运动槽四413内且与运动槽四43呈球面副配合。
37.当装配有本实用新型所述的传动机构的行走机器人在崎岖路面上行走时,如果发生剧烈运动,脚板受到的振动力会沿行走机构向上传递,当传递至主气缸二的上端时,与主气缸二的上端相连的转向牵引壳会向上振动,在整个行走机器人用传动机构自身重量的作用下,能够消除一部分振动。还有一部分振动力会沿转向牵引壳再向中间位置传递,转向牵引壳将振动力传递给转向主动座,转向主动座先通过位于下侧的下减震板将振动力传递给两个副减震,两个副减震能够消除一部分振动,转向主动座还会通过位于上方的上减震板将振动力传递给上减震,上减震能够消除一部分振动。主减震上固定座为向上凸出的弧状,该结构为反曲设计,能够起到一定的减震作用。行走机器人的减震结构,不仅采用主减震和两组副减震来进行减震,还利用整体结构的刚性来进行减震,最大程度地消除了震动,确保机器人的稳定性。由于行走机器人用传动机构用于在崎岖山地环境下运送伤病人员,考虑到使用环境的特殊性,行走机器人的减震结构采用多层空间布置、悬挂减震的方式来增强减震效果,减震和副减震自上向下依次布置,而且主减震和副减震是倾斜设置的,形成一个
上下的空间错位,这样就是采用斜向的反作用力去减缓震动的产生,而不是直接靠重力或者反作用力去压制,既保可以将减震效果利用到最大,又不会对坐在上方的伤病人员造成影响。
38.以上所述的实施例仅仅是对本实用新型的优选实施方式进行描述,并非对本实用新型的范围进行限定,在不脱离本实用新型设计精神的前提下,本领域普通技术人员对本实用新型的技术方案作出的各种变形和改进,均应落入本实用新型权利要求书确定的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

