1.本实用新型涉及机器人技术领域,尤其涉及一种新型变形轮装置。
背景技术:
2.目前,现有的移动机器人按运动机理和构形形式可分为三种移动机器人,即:轮式机器人、履式机器人和腿式机器人。其中轮式机器人具有结构简单、运行平稳、控制便利的特点,在速度和能耗方面的表现也是现有移动机器人中最好的,但是其不适合复杂多变的环境,越障能力差、通过率低。腿式机器人有着运动灵活,适应性好的特点,但是其机械结构复杂,步态控制困难,速度和能耗方面的表现都不尽如人意。履带式机器人有着较好的越障能力和适应复杂地形的能力,但是存在能耗高、速度及效率较低的缺点。
3.现有技术中已经存在轮履结合的变形轮用于机器人中,可在轮式运动模式和履带式运动模式之间进行切换,提高了机器人的越障能力。但是现有的变形轮装置仍然存在结构复杂,体积较大,易产生干涉,变形过程中不稳定。
技术实现要素:
4.为了至少解决上述技术问题之一,本实用新型的目的在于提供一种结构简单、体积较小、稳定可靠的新型变形轮装置。
5.为了至少实现上述目的之一,本实用新型提供的实施例中采用的技术方案为:提供一种新型变形轮装置,包括外轮架单元和变形单元,所述外轮架单元包括内腔,所述变形单元设置在所述内腔中;所述变形单元包括变形致动组件和变形从动组件;所述变形致动组件和所述变形从动组件可相对移动设置,所述变形致动组件和所述变形从动组件均与所述外轮架单元连接,通过控制所述变形致动组件和所述变形从动组件之间的相对位置,可致动所述变形轮装置在轮式和履带式之间切换。
6.进一步地,所述变形致动组件包括第一固定板,第二固定板和电机安装板;所述第一固定板和第二固定板平行对称设置,并通过所述电机安装板固定安装连接;所述第一固定板和第二固定板之间还安装有第一从动同步带轮和第一支撑轮,所述第一从动同步带轮和第一支撑轮分别设置在所述变形致动组件的两个端部。
7.进一步地,所述变形致动组件还包括电机和丝杆,所述电机安装在所述电机安装板上,并设置在所述第一固定板和第二固定板之间;所述丝杆穿过所述电机安装板向外延伸设置,所述丝杆上设置有螺母块;所述螺母块与所述变形从动组件连接。
8.进一步地,所述变形致动组件还包括滑轨,所述滑轨分别固定在所述第一固定板和第二固定板的外侧,并同所述丝杆延伸方向向外延伸设置。
9.进一步地,所述变形从动组件包括第一侧板,第二侧板,连接板,第一转接板和第二转接板,所述第一侧板和第二侧板平行对称设置,并通过所述连接板固定安装连接,所述连接板与所述螺母块固定连接;所述第一转接板和第二转接板分别固定设置在所述第一侧板和第二侧板的外侧;所述第一侧板和第二侧板之间还安装有第二从动同步带轮和第二支
撑轮,所述第二从动同步带轮和第二支撑轮分别设置在变形从动组件的两个端部。
10.进一步地,所述变形从动组件还包括滑块,两个所述滑块分别与所述第一转接板和第二转接板固连;两个所述滑块分别位于所述第一侧板和第一转接板之间及所述第二侧板和第二转接板之间;所述滑块与所述滑轨滑动配合连接。
11.进一步地,所述外轮架单元包括第一支撑组件和第二支撑组件;所述第一支撑组件和第二支撑组件均呈圆环状,所述第一支撑组件和第二支撑组件均通过多个弧形板铰接组成。
12.进一步地,所述弧形板为高强度碳纤维板。
13.进一步地,所述第一支撑组件和第二支撑组件通过动力单元和从动轮单元连接。
14.进一步地,所述动力单元包括主动同步带轮,所述从动轮单元包括多个从动同步带轮;所述主动同步带轮和从动同步带轮通过同步带啮合传动。
15.本实用新型提供的新型变形轮装置与现有技术相比,有益效果在于:
16.本实用新型提供的新型变形轮装置整体结构简单紧凑,通过将电机及丝杆集成在外轮架单元的内腔中,使变形轮装置的宽度和体积大大减小,极大降低了变形轮装置与其他零部件的干涉概率。同时电机及丝杆内置在变形轮装置的中心,将现有技术中的变形单侧向推力替换为中心对称推力,有助于提高变形的稳定性。
17.总之,本实用新型提出了一种结构简单、可靠性高、成本低的新型变形轮装置,其在机器人领域中具有广泛的应用前景。
附图说明
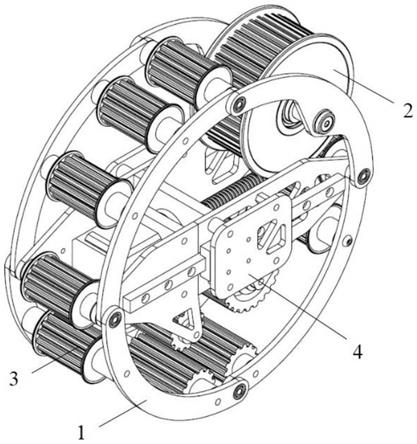
18.图1是本实用新型提供的新型变形轮装置为轮状时的结构示意图;
19.图2是本实用新型提供的外轮架单元的结构示意图;
20.图3是本实用新型提供的变形单元的结构示意图;
21.图4是本实用新型提供的变形单元的另一个视角的结构示意图;
22.图5是本实用新型提供的新型变形轮装置从轮状变形为履带状的示意图。
23.其中,附图标记说明如下:
24.1外轮架单元,1
‑
1第一支撑组件,1
‑
2第二支撑组件,2动力单元,3从动轮单元,3
‑
1第一从动同步带轮,3
‑
2第二从动同步带轮,4变形单元,4
‑
1变形致动组件,4
‑
11第一固定板,4
‑
12第二固定板,4
‑
13电机安装板,4
‑
14电机,4
‑
141丝杆,4
‑
142螺母块,4
‑
15滑轨,4
‑
16第一支撑轮,4
‑
2变形从动组件,4
‑
21第一侧板,4
‑
22第二侧板,4
‑
23连接板,4
‑
24第一转接板,4
‑
25第二转接板,4
‑
26滑块,4
‑
27第二支撑轮。
具体实施方式
25.为了使本领域技术人员更好地理解本实用新型的技术方案,下面结合具体实施例对本实用新型作进一步的详细说明。请注意,下面描述的实施例是示例性的,仅用于解释本实用新型,而不能理解为对本实用新型的限制。实施例中未注明具体技术或条件的,按照本领域内的文献所描述的技术或条件或者按照产品说明书进行。
26.在本实用新型的描述中,需要理解的是,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有
“
第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
27.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
28.以下,将通过具体实施例对本实用新型的新型变形轮装置作详细说明:
29.如图1
‑
5所示,本实用新型所述的新型变形轮装置,包括外轮架单元1,动力单元2,从动轮单元3,变形单元4和同步带(图中未示出)等零部件。
30.外轮架单元1作为新型变形轮装置的支撑骨架,包括第一支撑组件1
‑
1和第二支撑组件1
‑
2。第一支撑组件1
‑
1和第二支撑组件1
‑
2均呈圆环状,两者平行对称设置,每个支撑组件均通过多个弧形板铰接组成。弧形板的数量可根据实际工况进行合理设置,本实施例优选为4个。弧形板选择为高强度碳纤维板,高强度碳纤维板能够很好的解决变形轮装置的异常振动和噪音。
31.第一支撑组件1
‑
1和第二支撑组件1
‑
2通过动力单元2和从动轮单元3连接安装在一起。动力单元2包括电机,主动同步带轮和支撑轴等零部件。电机,主动同步带轮和支撑轴一体化同轴设置;当电机被控制旋转时,致动主动同步带轮相对支撑轴转动。所述支撑轴的两端分别固定支撑在第一支撑组件1
‑
1和第二支撑组件1
‑
2上。
32.从动轮单元3包括多个从动同步带轮,多个从动同步带轮间隔设置在外轮架单元1。从动同步带轮空套设置于从动轴上,从动轴的两端分别固定在第一支撑组件1
‑
1和第二支撑组件1
‑
2上;所述从动同步带轮根据实际工况可进行减重处理,以降低重量。
33.动力单元2中的主动同步带轮与从动同步带轮均与同步带啮合传动,同步带包裹在主动同步带轮与从动同步带轮的外侧。主动同步带轮和从动同步带轮均突出所述第一支撑组件1
‑
1和第二支撑组件1
‑
2的外缘。主动同步带轮和从动同步带轮支撑同步带,同步带与地面接触,电机带动主动同步带轮转动,可带动同步带移动,进而实现变形轮装置的转动。
34.变形单元4设置在第一支撑组件1
‑
1和第二支撑组件1
‑
2之间,变形单元4致动变形轮装置发生变形。变形单元4包括变形致动组件4
‑
1和变形从动组件4
‑
2。
35.变形致动组件4
‑
1包括第一固定板4
‑
11,第二固定板4
‑
12,电机安装板4
‑
13,电机4
‑
14,滑轨4
‑
15和第一支撑轮4
‑
16等零部件。第一固定板4
‑
11和第二固定板4
‑
12平行对称设置,并通过电机安装板4
‑
13固定安装连接,三者组成变形致动组件4
‑
1的框架支撑结构。电机4
‑
14安装在电机安装板4
‑
13上,并设置在第一固定板4
‑
11和第二固定板4
‑
12之间。所述电机4
‑
14包括同轴一体设置的丝杆4
‑
141,所述丝杆4
‑
141穿过所述电机安装板4
‑
13向外延伸设置,所述丝杆4
‑
141上设置有螺母块4
‑
142。两个滑轨4
‑
15分别固定在第一固定板4
‑
11和第二固定板4
‑
12的外侧,并同丝杆延伸方向向外延伸设置。在第一固定板4
‑
11和第二固定板4
‑
12之间还安装有第一从动同步带轮3
‑
1和第一支撑轮4
‑
16,第一从动同步带轮3
‑
1和第一支撑轮4
‑
16分别设置在变形致动组件4
‑
1的两个端部。
36.变形从动组件4
‑
2包括第一侧板4
‑
21,第二侧板4
‑
22,连接板4
‑
23,第一转接板4
‑
24,第二转接板4
‑
25,滑块4
‑
26和第二支撑轮4
‑
27等零部件。第一侧板4
‑
21和第二侧板4
‑
22平行对称设置,并通过连接板4
‑
23固定安装连接,三者组成变形从动组件4
‑
2的框架支撑结构。连接板4
‑
23与螺母块4
‑
142固定连接。
37.在第一侧板4
‑
21和第二侧板4
‑
22的外侧分别固定安装有第一转接板4
‑
24和第二转接板4
‑
25。在第一转接板4
‑
24和第二转接板4
‑
25分别固定设置有滑块4
‑
26。滑块4
‑
26分别位于第一侧板4
‑
21和第一转接板4
‑
24之间、第二侧板4
‑
22和第二转接板4
‑
25之间。滑块4
‑
26与所述滑轨4
‑
15滑动配合,将所述变形从动组件4
‑
2导向支撑在所述滑轨4
‑
15上,同时可限制变形从动组件4
‑
2绕丝杆4
‑
141转动。当电机4
‑
14致动丝杆4
‑
141转动时,通过螺母块4
‑
142致动连接板4
‑
23直线移动,在滑块4
‑
26与滑轨4
‑
15的滑动配合,进而实现变形从动组件4
‑
2相对变形致动组件4
‑
1前后移动。在第一侧板4
‑
21和第二侧板4
‑
22之间还安装有第二从动同步带轮3
‑
2和第二支撑轮4
‑
27,第二从动同步带轮3
‑
2和第二支撑轮4
‑
27分别设置在变形从动组件4
‑
2的两个端部。
38.当变形单元4中的变形从动组件4
‑
2远离所述变形致动组件4
‑
1移动时,外轮架单元1中的第一支撑组件1
‑
1和第二支撑组件1
‑
2的铰接处受力拉伸,使外轮架单元1变形为类椭圆形,整个变形轮装置从轮式变形为履带式。同时第一支撑轮4
‑
16和第二支撑轮4
‑
27均抵接在同步带上,从而使同步带保持张紧状态。
39.本实用新型提供的新型变形轮装置与现有技术相比:新型变形轮装置整体结构简单紧凑,通过将电机及丝杆集成在外轮架单元的内腔中,使变形轮装置的宽度和体积大大减小,极大降低了变形轮装置与其他零部件的干涉概率。同时电机及丝杆内置在变形轮装置的中心,将现有技术中的变形单侧向推力替换为中心对称推力,有助于提高变形的稳定性。
40.总之,本实用新型提出了一种结构简单、体积更小、可靠稳定的新型变形轮装置,其在机器人领域中具有广泛的应用前景。
41.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
42.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组件合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

