1.在本技术涉及仿生机器人领域,特别是一种研究动物弹跳的仿猴机器人。
背景技术:
2.随着我国太空实验室的建成,月球及火星探测将成为未来科学研究的突破口。由于失重的原因,双足及多足行走、轮式行进等传统的运动方式越来越难以完成日益复杂的太空探索任务。
3.弹跳运动在失重环境下具有移动速度快、运动距离远的优势,将在未来太空探索中发挥越来越重要的作用。目前的弹跳机构主要关注的是弹跳的速度和距离,而腾空阶段姿态的控制很少有人关注。
4.地球上有许多弹跳能力很强的动物,灵长类动物作为一种与人类接近的高智商动物,具备在树林等复杂环境下跳跃的能力,研究这类动物的运动对探索在失重环境下的运动方式及开发弹跳机器人具有重要意义。仿生的第一步是从真实的动物身上抽象出合理简化后的模型,对这个模型进行研究。此外,简化后的模型应该具有足够的自由度,可以为研究动物的运动提供足够的数据支撑。
5.中国专利文献cn108858147公开的“一种气动肌肉驱动灵长类仿生机器人”只公布了一种气压驱动的机器人手臂,中国专利文献cn109986579b公开的“多模式运动仿灵长类机器人”结构复杂且未考虑灵长类动物尾巴,也为考虑灵长类的弹跳运动,因此在这一研究领域,具有更完备运动状态的机器人应该考虑进来。
技术实现要素:
6.本发明正是遵循这一仿生思路设计了一种研究动物弹跳的仿猴机器人,来解决上述背景中存在的问题。
7.为实现上述目的,本发明提供如下技术方案:一种研究动物弹跳的仿猴机器人,其中主体包括头部、左上肢电机座、右上肢电机座、左下肢电机座、右下肢电机座和翻滚电机座,左上肢电机座和右上肢电机座、左下肢电机座和右下肢电机座沿主体中轴线对称分布,主体空腔内的微控制器、惯性测量模块、无线通讯模块、电池及相关电路均有合理的分布,且该空腔内的器件可以通过连接线与机器人上的电机进行通讯;上肢电机包括左上肢电机和右上肢电机,其中左上肢电机固定安装在主体的左上肢电机座里,右上肢电机固定安装在主体的右上肢电机座里;上肢包括左上肢和右上肢,其中左上肢与左上肢电机的输出轴固定连接,右上肢与右上肢电机的输出轴固定连接;下肢电机包括左下肢电机和右下肢电机,其中左下肢电机固定安装在左下肢电机座里,右下肢电机固定安装在右下肢电机座里。
8.所述弹跳腿包括左弹跳腿和右弹跳腿,其中左弹跳腿和右弹跳腿具有相同的结构,均包含下肢驱动杆、驱动连杆、股骨、胫骨、腓骨、踝
‑
足连杆、弹簧、弹簧连接孔和弹跳驱动电机,其中股骨较粗一端的连接孔与下肢电机输出轴固定连接,弹跳腿中含有固定连接在股骨上的弹跳驱动电机,该弹跳驱动电机的输出轴与下肢驱动杆固定连接,驱动连杆一
端与下肢驱动杆转动连接,另一端与胫骨转动连接,胫骨一端与驱动连杆转动连接,中部偏上方较粗位置与股骨末端转动连接,末端与踝
‑
足连杆中部转动连接,踝
‑
足连杆中部与胫骨转动连接,末端与腓骨一端转动连接,腓骨一端与踝
‑
足连杆末端转动连接,另一端转动连接于股骨上,股骨一端与下肢电机输出轴固定连接,另一端与胫骨转动连接,在靠近胫骨的位置与腓骨转动连接,弹簧作为弹性元件,两端分别连接于股骨和腓骨的弹簧连接孔内。
9.所述三自由度尾巴控制装置在主体中轴线位于主体末端的位置,包括翻滚电机、偏航舵机、俯仰舵机、第一舵机连接件、十字连接架、第二舵机连接件,其中翻滚电机一端固定连接于主体上的翻滚电机座中,翻滚电机另一端的输出轴与第一舵机连接件背侧固定连接,偏航舵机一端固定连接于第一舵机连接件另一侧的槽内,偏航舵机另一端的输出轴与十字连接架的一侧固定连接,十字连接架另一侧与俯仰舵机一端的输出轴固定连接,俯仰舵机另一端固定连接在第二舵机连接件的槽内,第二舵机连接件另一端与尾巴固定连接。
10.所述尾巴包括尾巴连接头、尾巴基体和配重,其中尾巴连接头一端和第二舵机连接件的背侧固定连接,另一端和尾巴基体固定连接,尾巴基体和配重为可拆卸结构,可以根据不同的需要更换质量不同的配重。
11.本发明与现有技术相比,具有如下有益效果。
12.1.采用灵长类下肢的肌肉
‑
骨骼特点来设计弹跳腿,可模拟真实动作实现弹跳运动。
13.2.采用可以进行翻滚、俯仰和偏航三个姿态角转动的尾巴,且尾巴为可变质量,可充分研究尾巴对其整体运动的影响。
14.3.四肢和尾巴的电机均可由微控制器统一控制,可提高机器人腾空阶段四肢和尾巴协同运动的可控性。
附图说明
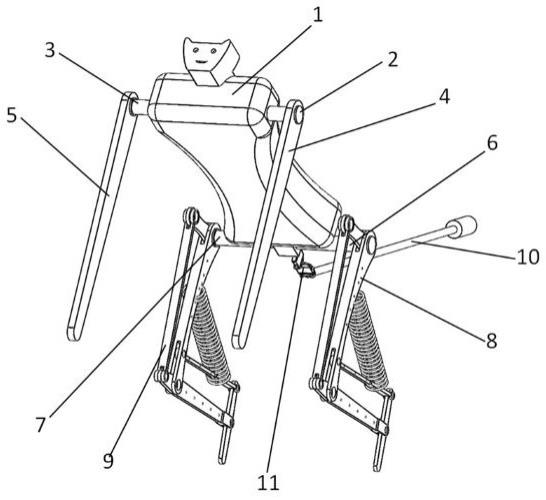
15.图1是本发明中机器人的整体结构示意图。
16.图2是本发明中机器人主体的结构示意图。
17.图3是本发明中机器人弹跳腿的结构示意图。
18.图4是本发明中机器人股骨和胫骨的结构示意图。
19.图5是本发明中机器人三自由度尾巴控制装置的结构示意图。
20.图6是本发明中机器人第一舵机连接件的结构示意图。
21.图7是本发明中机器人第二舵机连接件的结构示意图。
22.图8是本发明中机器人十字连接架的结构示意图。
23.图9是本发明中机器人尾巴的结构示意图。
24.图10是本发明一种研究动物弹跳的仿猴机器人的起跳状态示意图。
25.图中:1
‑
主体,2
‑
左上肢电机,3
‑
右上肢电机,4
‑
左上肢,5
‑
右上肢,6
‑
左下肢电机,7
‑
右下肢电机,8
‑
左弹跳腿,9
‑
右弹跳腿,10
‑
尾巴,11
‑
三自由度尾巴控制装置,12
‑
头部,13
‑
左上肢电机座,14
‑
右上肢电机座,15
‑
左下肢电机座,16
‑
右下肢电机座,17
‑
翻滚电机座,18
‑
微控制器,19
‑
无线模块,20
‑
惯性测量模块,21
‑
电池,22
‑
下肢驱动杆,23
‑
驱动连杆,24
‑
股骨,25
‑
胫骨,26
‑
踝
‑
足连杆,27
‑
腓骨,28
‑
弹簧,29
‑
弹簧连接孔,30
‑
弹跳驱动电机、31
‑
翻滚电机,32
‑
偏航舵机,33
‑
俯仰舵机,34
‑
第一舵机连接件,35
‑
第二舵机连接件,36
‑
十
字连接架,37
‑
尾巴连接头,38
‑
尾巴基体,39
‑
配重。
具体实施方式
26.下面根据图1至图6对本技术的具体实施方式作出进一步说明。
27.在本发明中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”、“顺时针”和“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
28.参见图1和图2,一种研究动物弹跳的仿猴机器人,其特征在于:包括主体1、左上肢电机2、右上肢电机3、左上肢4、右上肢5、左下肢电机6、右下肢电机7、左弹跳腿8、右弹跳腿9、尾巴10和三自由度尾巴控制装置11;所述主体包括头部12、左上肢电机座13、右上肢电机座14、左下肢电机座15、右下肢电机座16和翻滚电机座17,主体内具有空腔,空腔内部放有微控制器18、无线通讯模块19、惯性测量模块20、电池21及相关电路;左上肢电机座13和右上肢电机座14、左下肢电机座15和右下肢电机座16沿主体中轴线对称分布,三自由度尾巴控制装置11在主体中轴线位于主体1末端的位置;其中左上肢电机2固定安装在主体1的左上肢电机座13里,右上肢电机3固定安装在主体1的右上肢电机座14里;其中左上肢4与左上肢电机2的输出轴固定连接,右上肢5与右上肢电机3的输出轴固定连接;其中左下肢电机6固定安装在主体1的左下肢电机座15里,右下肢电机7固定安装在主体1的右下肢电机座16里。
29.进一步地,参见图2,所述主体空腔内的微控制器18、无线通讯模块19、惯性测量模块20、电池21及相关电路均有合理的分布,且该空腔内的器件可以通过连接线与机器人上的电机、舵机进行通讯。
30.进一步地,参见图3
‑
图4,所述具有相同结构的左弹跳腿8和右弹跳腿9均包含下肢驱动杆22、驱动连杆23、股骨24、胫骨25、踝
‑
足连杆26、腓骨27、弹簧28、弹簧连接孔29和弹跳驱动电机30;其中左弹跳腿8和右弹跳腿9的股骨24较粗一端的连接孔分别与左下肢电机6和右下肢电机7的输出轴固定连接;弹跳腿中含有固定连接在股骨24上的弹跳驱动电机30,该电机输出轴与下肢驱动杆22固定连接;驱动连杆23一端与下肢驱动杆22转动连接,另一端与胫骨25转动连接;胫骨25一端与驱动连杆23转动连接,中部偏上方较粗位置与股骨24末端转动连接,另一端与踝
‑
足连杆26中部转动连接;踝
‑
足连杆26中部与胫骨25转动连接,末端与腓骨27一端转动连接;腓骨27一端与踝
‑
足连杆26末端转动连接,另一端与股骨24转动连接;股骨24一端与左下肢电机6或右下肢电机7输出轴固定连接,另一端与胫骨25转动连接,中部靠近与胫骨的位置与腓骨27一端转动连接;所述腓骨27和股骨24上均加工有若干弹簧连接孔29,弹簧28两端分别固定安装在两个零件的弹簧连接孔29内。
31.进一步地,参见图5
‑
图8,所述三自由度尾巴控制装置11包括翻滚电机31、偏航舵机32、俯仰舵机33、第一舵机连接件34、第二舵机连接件35、十字连接架36;其中翻滚电机31一端固定连接于主体1上的翻滚电机座17中,翻滚电机31另一端的输出轴与第一舵机连接件34背侧固定连接,偏航舵机32一端固定连接于第一舵机连接件34另一侧的槽内,偏航舵机32另一端的输出轴与十字连接架36的一侧固定连接,十字连接架36另一侧与俯仰舵机33一端的输出轴固定连接,俯仰舵机33另一端固定连接在第二舵机连接件35的槽内,第二舵
机连接件35另一端与尾巴10固定连接。
32.进一步地,参见图9,所述尾巴10包括尾巴连接头37、尾巴基体38和配重39;其中尾巴连接头37一端和第二舵机连接件35的背侧固定连接,尾巴连接头37另一端和尾巴基体38固定连接,尾巴基体38和配重39为可拆卸结构,可以根据需要更换质量不同的配重39。
33.下面结合图10对本实施例作具体使用原理说明。
34.起跳阶段:首先通过无线通讯模块远程启动机器人,机器人通过惯性测量模块20识别自身的位姿,通过微控制器18控制弹跳驱动电机30控制弹跳腿的运动,此时,由于弹跳驱动电机30的输出轴和下肢驱动杆22固定连接,从而可以使图3中的下肢驱动杆22绕弹跳驱动电机30的输出轴逆时针转动。由于驱动连杆23一端与弹跳驱动杆22连接,因此驱动连杆23往左下方运动,由于胫骨25上端与驱动连杆23连接,因此胫骨25以其与股骨24连接位置为圆心逆时针转动,由于腓骨27通过踝
‑
足连接件26与胫骨25下端连接,故腓骨27也逆时针转动,从而两个弹簧连接孔29的间距变小,弹簧10被压缩积累弹性势能,此时,机器人调整为如图10所示的弹跳模式,当惯性测量模块20识别到机器人达到可以起跳的位姿时,弹跳驱动电机30失电,弹簧10释放并将机器人弹跳到空中。
35.腾空阶段:当机器人弹跳到空中之后,可以根据实验需求检验左上肢4、右上肢5、左弹跳腿8、右弹跳腿9和尾巴10的摆动对其空中姿态的影响。可通过无线通讯模块19远程对微控制器18施加指令,微控制器通过控制左上肢电机2、右上肢电机3、左下肢电机6和右下肢电机7实现左上肢4、右上肢5、左弹跳腿8和右弹跳腿9单独摆动或协同摆动;当需要检测尾巴10摆动对机器人空中运动的影响时,可通过无线通讯模块19远程对微控制器18施加指令,此时,微控制器18控制翻滚电机31、偏航舵机32和俯仰舵机33可单独或协同控制尾巴的俯仰、偏航和翻滚三个角度的运动;类似的,也可以实现尾巴10和左上肢4、右上肢5、左弹跳腿8和右弹跳腿9的协同控制。
36.着陆阶段:当机器人从空中落地后,其身体姿态由于受到地面的冲击力容易处于不稳定的姿态,此时通过惯性测量模块20可以识别主体1不稳定的姿态,并可以通过微控制器18控制翻滚电机31、偏航舵机32和俯仰舵机33摆动尾巴10来将主体1的姿态摆正。
37.需要说明的是,本发明中弹跳机构的弹跳形式和尾巴的摆动方式并不限于上述实施例,连杆传动的设置方式也不限于上述实施例,根据实际需求而进行的适应性改变均在本发明的保护范围内;同时,本发明中肢体的摆动形式也不限于上述实施例,根据实际需求而进行的适应性改变均在本发明的保护范围内。显然,对于本领域技术人员而言,本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内,不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
38.本发明中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

