1.本发明属于智能越障设备领域,具体涉及一种可折叠变形履带车。
背景技术:
2.现有的越障机器人从移动方式上分为轮式、履带式、腿式以及球型机器人,不同的移动方式使其具有不同的移动效果以及所适应的工作环境。轮式移动机器人在平整的结构化路面具有独特的速度优势,履带式移动机器人在起伏的非结构化路面具有良好的通过性,腿式移动机器人在崎岖山路等复杂路面具有优越的越障性能,球型移动机器人具有移动效率高与节能性的特点。目前没有某一种结构能够同时兼具上述的所有性能,现有的移动机器人大都是利用上述几种移动结构的两两组合甚至多种组合实现应对多种不同混合式的路面情况。
3.但是大多数移动结构由于本身的结构原因,导致结合起来有很大的限制,进而导致机器人在通过不同路面各个结构进行转换时,非常不灵活,十分影响机器人通过的效率,限制了其应用领域的发展。
技术实现要素:
4.为了解决上述现有技术中存在的缺点,本发明提供一种可折叠变形履带车,具体方案如下:
5.一种可折叠变形履带车,包括车体,所述车体的两侧垂直穿设有若干主动轴,所述主动轴传动连接有动力机,所述主动轴位于所述车体外的末端连接有可折叠变形履带模块,所述可折叠变形履带模块包括垂直穿设于所述主动轴上的轮杆,所述轮杆的两端各铰接有一个折角轮组件,所述折角轮组件上设有传动履带;所述轮杆与所述折角轮组件之间设有主动变形组件,所述主动变形组件用于驱动所述折角轮组件绕铰接点转动,所述轮杆两端的折角轮组件转动方向相反。
6.进一步地,所述折角轮组件包括折角板,所述折角板为等腰三角形;所述折角板其中一个底角通过铰接轴与所述轮杆铰接;所述折角板的顶角和另一个底角设有与所述铰接轴平行的轮轴,所述铰接轴和所述轮轴上均穿设有履带轮,所述传动履带套设于所述履带轮之间;
7.所述主动轴上穿设有主动链轮,所述铰接轴上还穿设有被动链轮,所述被动链轮通过传动链条与所述主动链轮传动连接。
8.进一步地,所述折角板对应底边中点的位置设有与所述轮轴平行的张紧轴,所述张紧轴上穿设有张紧轮。
9.进一步地,所述张紧轴与所述折角板的顶角的距离小于所述折角板的高,所述折角板的底边成型有缺口。
10.进一步地,所述主动变形组件包括主动变形杆,所述主动变形杆的中点通过轴承套设于所述主动轴上;所述主动变形杆的两端各铰接一根变形连杆,所述变形连杆的末端
通过与所述轮轴平行的销轴与所述折角板铰接。
11.进一步地,所述主动变形杆上设有变形齿轮,所述变形齿轮与所述主动变形杆固定连接且与所述主动轴同轴布置,所述变形齿轮传动连接有电机。
12.进一步地,所述电机固定设于所述轮杆上,所述电机的输出端和所述变形齿轮为互相啮合的锥齿轮组。
13.进一步地,所述折角板和所述轮杆均为双板结构,两块所述折角板对称分布于所述履带轮的两侧,两块所述轮杆对称分布于所述折角轮组件的两侧。
14.本发明的有益效果在于:
15.本发明提出的一种可折叠变形履带车,通过变形适用于不同工况下的环境越障,增加运动行驶工况的多样性,提高整车的越障性能。
附图说明
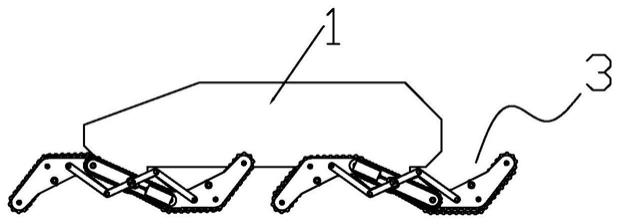
16.图1为本发明的结构示意图,
17.图2为本发明的结构俯视图,
18.图3为本发明可折叠变形履带模块的展开示意图,
19.图4为本发明可折叠变形履带模块的折叠示意图,
20.图5为本发明可折叠变形履带模块的结构立体图,
21.图6为本发明折角轮组件的结构示意图,
22.图7为本发明折角轮组件的内部结构示意图,
23.图8为本发明主动变形组件的结构示意图,
24.图9为本发明矮墙越障示意图i,
25.图10为本发明矮墙越障示意图ii,
26.图11为本发明矮墙越障示意图iii,
27.图12为本发明矮墙越障示意图iv,
28.图13为本发明矮墙越障示意图v,
29.图14为本发明矮墙越障示意图vi,
30.图15为本发明高墙越障示意图i,
31.图16为本发明高墙越障示意图ii,
32.图17为本发明高墙越障示意图iii,
33.图18为本发明高墙越障示意图iv,
34.图19为本发明高墙越障示意图v,
35.图20为本发明高墙越障示意图vi,
36.图21为本发明高墙越障示意图vii,
37.图22为本发明高墙越障示意图viii。
38.附图序号及名称:1、车体,2、主动轴,3、可折叠变形履带模块,31、轮杆,32、折角轮组件,321、传动履带,322、折角板,323、铰接轴,324、轮轴,325、履带轮,326、被动链轮,327、张紧轴,328、张紧轮,33、主动变形组件,331、主动变形杆,332、变形连杆,333、销轴,334、变形齿轮,335、电机。
具体实施方式
39.为详细说明本发明之技术内容、构造特征、所达成目的及功效,以下兹例举实施例并配合附图详予说明。
40.如图1和图2所示,本发明公开了一种可折叠变形履带车,包括车体1,车体1的两侧垂直穿设有若干主动轴2,主动轴2传动连接有动力机,主动轴2位于车体1外的末端连接有可折叠变形履带模块3。结合图3和图4,可折叠变形履带模块3包括垂直穿设于主动轴2上的轮杆31,轮杆31的两端各铰接有一个折角轮组件32,折角轮组件32上设有传动履带321。
41.本技术采用欠驱动方式驱动整车,具有越障反应迅速的特点,越障过程无需探测地形,直接越过障碍;另外由于本技术的履带模块可以变形,在折叠状态时履带轮的越障力臂短,能够快速响应并快速跨越障碍物;本技术的履带模块,展开状态时有类似撑杆效果,可跨越大尺寸障碍物。
42.对照图6和图7,折角轮组件32包括折角板322,折角板322为等腰三角形;折角板322其中一个底角通过铰接轴323与轮杆31铰接;折角板322的顶角和另一个底角设有与铰接轴323平行的轮轴324,铰接轴323和轮轴324上均穿设有履带轮325,传动履带321套设于履带轮325之间;履带轮以串联的方式驱动,相对于传统整条履带,便于拆卸维修,减少了维护成本。
43.参照图5和图7,主动轴2上穿设有主动链轮21,铰接轴323上还穿设有被动链轮326,被动链轮326通过传动链条与主动链轮21传动连接。折角板322和轮杆31均为双板结构,两块折角板322对称分布于履带轮325的两侧,两块轮杆31对称分布于折角轮组件32的两侧。折角板322对应底边中点的位置设有与轮轴324平行的张紧轴327,张紧轴327上穿设有张紧轮328。张紧轴327与折角板322的顶角的距离小于折角板322的高,折角板322的底边成型有缺口。
44.折角板设计成底边有缺口的等腰三角形(即两个底角超出底边),是为了保证在展开状态时,前后两节履带成勾状外形,有利于提高攀爬稳定性(推拉力越障)。
45.如图8,轮杆31与折角轮组件32之间设有主动变形组件33,主动变形组件33用于驱动折角轮组件32绕铰接点转动,轮杆31两端的折角轮组件32转动方向相反。主动变形组件33包括主动变形杆331,主动变形杆331的中点通过轴承套设于主动轴2上;主动变形杆331的两端各铰接一根变形连杆332,变形连杆332的末端通过与轮轴324平行的销轴333与折角板322铰接。
46.主动变形杆331上设有变形齿轮334,变形齿轮334与主动变形杆331固定连接且与主动轴2同轴布置,变形齿轮334传动连接有电机335。电机335固定设于轮杆31上,电机335的输出端和变形齿轮334为互相啮合的锥齿轮组。
47.本发明的工作原理如下:
48.1.矮墙越障:
49.初始状态如图9所示,此时整个车体为自适应欠驱动方式驱动,此时主动轴带动履带使整个车体向前运动;如图10所示,前轮接触到障碍时,主动轴带动履带的同时,会使可折叠变形履带模块绕主动轴转动,进而使前轮开始越障;如图11所示,前轮越障完成;如图12所示,后轮接触障碍;如图13所示,后轮开始越障;如图14所示,越障结束。
50.2.高墙越障:
51.初始状态如图15所示,此时整个车体为自适应欠驱动方式驱动,此时主动轴带动履带使整个车体向前运动;如图16所示,电机驱动主动变形杆转动使轮杆两端的折角轮处于展开状态;如图17所示,前轮开始接触障碍;如图18所示,前轮越障前半段(撑杆);如图19所示,前轮越障后半段(攀爬);如图20所示,前轮越障完成,同时后轮开始越障;如图21所示,越障结束;如图22所示,电机驱动主动变形杆转动使轮杆两端的折角轮折叠。
52.综上,仅为本发明之较佳实施例,不以此限定本发明的保护范围,凡依本发明专利范围及说明书内容所作的等效变化与修饰,皆为本发明专利涵盖的范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

