1.本实用新型涉及一种圆棒加工机领域,尤指一种圆棒加工机的定位改良结构的范畴。
背景技术:
2.一般的圆棒加工机作业时只能加工单一角度,当产品的端面需要多角度研磨的时候,就需要工作人员拿出工具,调整螺丝的松紧,来变动磨轮座的研磨角度,因为需要工作人员的操作,磨轮座的角度在经过人工调整的后不能保证没有偏差,这样一来会导致圆棒加工完成后产生的误差值增加,更严重可能会导致圆棒加工机的损害。
3.换言之,人为的操作在精密的加工上是需要去极力避免的,而且这种需要利用工具调整角度的作业效率相当低落,实有需要加以改善。
技术实现要素:
4.缘此,本实用新型设计人乃穷极心思开发出本实用新型圆棒加工机的定位改良结构,故本实用新型的主要目的在于:在于提供提升圆棒加工效率的一种研磨角度自动化定位旋转装置;本实用新型的次要目的:在于在圆棒加工机进行加工作业的时候,避免磨轮产生震动影响圆棒成品;本实用新型再一次要目的:在于可精准控制研磨装置自动控制的旋转的角度。
5.本实用新型为达到上述目的,运用如下技术手段:
6.关于本实用新型圆棒加工机的定位改良结构,包含有:一滑座,设有一夹持装置,该夹持装置提供夹持一圆棒,并在该夹持装置对面,延伸设有一校正圆心组件;及一研磨座,是在一座板上设有一第一研磨装置,该第一研磨装置进一步包含一第一马达和一第一磨轮,其中该第一马达用来驱动该第二磨轮,以及一旋转定位装置,其中该旋转定位装置来驱动该第一研磨装置旋转定位;凭借该旋转定位装置可以将该第一研磨装置进行角度精密定位的自动控制,以利于圆棒端多角度研磨,据以提升圆棒研磨的加工效率。
7.上述其中该研磨座另包含有一第二研磨装置,该第二研磨装置进一步包含一第二马达及一第二磨轮,其中该第二马达用来驱动该第二磨轮。
8.上述其中该旋转定位装置更包含有一第三马达、一减速装置及一刹车装置,该减速装置的动力输入端接设在该第三马达的转轴上,且该刹车装置接设在该减速装置的动力输出端。
9.上述其中该刹车装置更包含有一刹车片及一油压倍力件,而该油压倍力件所产生的油压力量会施于该刹车片上,以利于该刹车片进行刹车作用。
10.上述其中该刹车装置可设为油压式、电磁式、碟刹式或鼓刹式。
11.上述其中该旋转定位装置可提供该第一研磨装置的可旋转角度为
‑
10
°
至110
°
。
12.运用上述技术手段,可以达成如下功效:
13.本实用新型凭借该旋转定位装置接设在该第一研磨装置,进行第一研磨装置的自
动化角度精密定位,据以达到圆棒加工机进行圆棒端面的加工作业一次性完成,而提升研磨作业效率。
14.本实用新型凭借该油压倍力件产生油压力量的时候,分出一向下的力道,让作动的该第一研磨装置能够稳固的接设在圆棒加工机上不致产生晃动,达到防震的效果。
15.本实用新型的该旋转定位装置驱动该第一研磨装置,同时提供该第一研磨装置角度准备定位后,该刹车装置施予一力让该旋转定位装置静止在指定的角度,达到精准控制研磨装置自动控制的旋转的角度。
附图说明
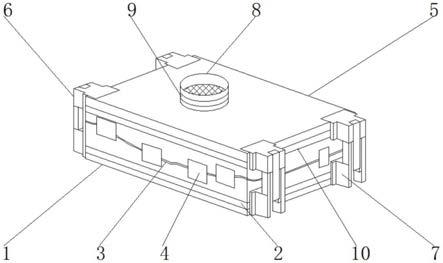
16.图1是本实用新型圆棒加工机的定位改良结构的立体图。
17.图2是本实用新型圆棒加工机的定位改良结构另一角度的立体图。
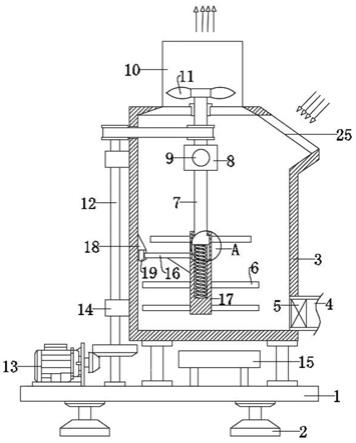
18.图3是本实用新型圆棒加工机的定位改良结构的剖面图。
19.图4是本实用新型圆棒加工机的定位改良结构的旋转定位装置的立体分解图。
20.图5是本实用新型圆棒加工机的定位改良结构的滑座的作动示意图。
21.图6是本实用新型圆棒加工机的定位改良结构的第一研磨装置的作动示意图。
22.附图标记说明:a
‑
圆棒加工机;1
‑
滑座;10
‑
夹持装置;11
‑
圆棒;12
‑
校正圆心组件;2
‑
研磨座;21
‑
座板;22
‑
滑轨;3
‑
第一研磨装置;30
‑
第一马达;31
‑
第一磨轮;4
‑
第二研磨装置;40
‑
第二马达;41
‑
第二磨轮;5
‑
旋转定位装置;50
‑
第三马达;51
‑
减速装置;52
‑
动力输入端;53
‑
动力输出端;6
‑
刹车装置;60
‑
刹车片;61
‑
油压倍力件;62
‑
固定组件;7
‑
座体。
具体实施方式
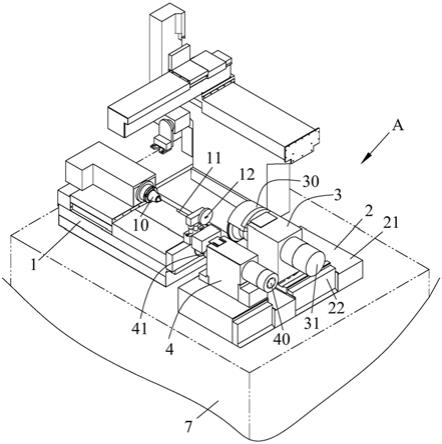
23.请参阅图1至图4所示,本实用新型圆棒加工机a的定位改良结构包括有:一滑座1、一研磨座2、一第一研磨装置3、一第二研磨装置4或一旋转定位装置5的构件,兹将上述构件配合图式分别说明如后。
24.所述该滑座1,设有一夹持装置10,该夹持装置10提供夹持一圆棒11,并在该夹持装置10对面,延伸设有一校正圆心组件12,该校正圆心组件12的作用是该夹持装置10向前推进加工的时候,用来固定被该夹持装置10夹持的该圆棒11确保不会偏心,以利于该圆棒11被夹持及旋转。
25.所述该研磨座2,是在一座板21上设有一第一研磨装置3,而所述该研磨座2可以是凭借数线性滑轨22配合一传动螺杆、一伺服马达及一控制器来进行定位移动,则该滑座1和该研磨座2接设于一座体7。
26.所述该第一研磨装置3进一步包含一第一马达30和一第一磨轮31,其中该第一马达30用来驱动该第二磨轮31旋转。
27.所述该第二研磨装置4设于该研磨座2的该座板21上,并位于该第一研磨装置3的下方处,又该第二研磨装置4进一步包含一第二马达40及一第二磨轮41,其中该第二马达40用来驱动该第二磨轮41旋转。
28.所述该旋转定位装置5,其中该旋转定位装置5来驱动该第一研磨装置3旋转定位,且该旋转定位装置5更包含有一第三马达50、一减速装置51及一刹车装置6;其中,该减速装置51的动力输入端52接设在该第三马达50的转轴上,且该刹车装置52接设在该减速装置51
的动力输出端53,且该旋转定位装置提供该第一研磨装置的可旋转的角度为
‑
10
°
至110
°
,另外,该旋转定位装置5可被第四轴装置所取代。
29.进一步,该刹车装置6可设为油压式、电磁式、碟刹式、鼓刹式或机械式,较佳实施例为油压式,其中油压式更包含有一刹车片60及一油压倍力件61,且该刹车装置6接设于该减速装置51的动力输出端54,则一固定组件62穿过该第一研磨装置3接设在该油压倍力件61上,而该油压倍力件61所产生的油压力量会施于该刹车片60上,以利于该刹车片60进行刹车作用及提供精密角度定位的作用。
30.该油压倍力件61产生的油压力量除了可以对该刹车片60进行刹车作用之外,在圆棒加工机a进行加工作业的同时,该油压倍力件61的油压力量产生一分力,对该第一研磨装置3施予一个向下的力道,让该第一研磨装置3被该第一马达30驱动旋转的时候可以稳固的对该圆棒11进行研磨。
31.接着,请参阅图5至图6所示,该滑座1的该夹持装置10夹持该圆棒11后朝着该研磨座2进行线性运动,然后在接近该研磨座2的时候,该校正圆心组件12从两侧固定该圆棒11,推进该研磨座2,该第二研磨装置4先对该圆棒11的端面进行粗研磨,接着该第一研磨装置3可以依照加工的需求,凭借该旋转定位装置5进行精密定位的自动控制将该第一磨轮31转动至需要的研磨角度;特别一提,也可使该研磨座2朝向该夹持装置10及该圆棒11移动来进行该圆棒11的研磨加工。
32.换言之,该旋转定位装置5驱动该第一研磨装置3,可以对该圆棒11不同的端面进行各种角度的研磨,解决现有的加工机如要进行不同研磨角度时,必须停止加工机之后,请工作人员利用工具来更动磨轮装置的角度问题。
33.以上说明对本实用新型而言只是说明性的,而非限制性的,本领域普通技术人员理解,在不脱离权利要求所限定的精神和范围的情况下,可作出许多修改、变化或等效,但都将落入本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。