1.本发明涉及细胞培养领域,更具体地涉及一种培养操作装置。
背景技术:
2.在细胞培养领域内,需要在不同的容器内对培养基和/或细胞溶液进行精确定量的抽取作业和注入作业。在现有的大多数情况下,经常需要操作人员手动进行这种抽取作业和注入作业。但是由于在上述作业过程中需要经常更换不同的容器和移液吸头而且需要对培养基和/或细胞溶液的用量进行精确把控,因此通过操作人员手动进行上述作业存在作业繁琐,工作量大,作业过程易于出现错误等问题。
技术实现要素:
3.鉴于上述现有技术的缺陷而做出了本发明。本发明的一个目的在于提供一种培养操作装置,其能够在细胞培养领域内节省人工,防止作业过程出现错误。
4.为了实现上述发明目的,本发明采用如下的技术方案。
5.本发明提供了一种如下的培养操作装置,其特征在于,所述培养操作装置包括:
6.多个容器,各所述容器包括容器本体和与所述容器本体配合的盖;
7.多个移液吸头;
8.工作台,在所述工作台上设置有置放部件、盖操作部件、移液部件和移动部件,所述置放部件用于分别置放所述容器的容器本体、盖和所述多个移液吸头,所述盖操作部件用于操作不同的所述容器的盖以实现所述盖与对应的所述容器本体的接合作业和分离作业,所述移液部件用于选择性地接合和卸载不同的所述移液吸头并能够利用所接合的所述移液吸头对所述容器本体进行移液作业,所述移动部件用于使得所述盖操作部件和所述移液部件相对于所述置放部件在彼此正交的竖直方向、第一水平方向和第二水平方向三个方向上进行相对移位;
9.控制部,所述控制部能够按照预定程序控制所述盖操作部件的所述接合作业和所述分离作业,控制所述移液部件选择性地接合和卸载不同的所述移液吸头以及进行所述移液作业,并且控制所述移动部件实现所述相对移位;以及
10.安全柜,其提供无菌的工作环境,通过使所述工作台设置于所述安全柜内,使得所述置放部件、所述盖操作部件、所述移液部件和所述移动部件均处于所述工作环境内。
11.优选地,所述置放部件包括:
12.容器本体收容部,所述容器本体收容部用于收容对应的所述容器的容器本体;
13.盖置放部,所述盖置放部用于置放所述容器的盖;
14.移液吸头收容部,所述移液吸头收容部用于收容使用前的所述移液吸头;以及
15.移液吸头回收部,所述移液吸头回收部用于回收使用后的所述移液吸头。
16.更优选地,所述容器本体收容部包括:
17.固定收容部,所述固定收容部以使对应的所述容器本体相对于所述工作台成不变
的预定角度的方式保持对应的所述容器本体;以及
18.可动收容部,所述可动收容部以使对应的所述容器本体相对于所述工作台能够转动的方式保持对应的所述容器本体。
19.更优选地,所述可动收容部使对应的所述容器本体绕着所述第一水平方向和/或所述第二水平方向转动。
20.更优选地,所述容器本体收容部设置有用于夹持所述容器的容器本体的夹持组件,所述夹持组件包括在预定方向上能够相互接近和远离的多个夹持部,从而能够利用所述多个夹持部来相对于所述容器本体收容部固定保持所述容器的容器本体。
21.更优选地,所述盖置放部形成有与各所述盖的形状相匹配从而对其进行收容的收容部。
22.更优选地,所述盖操作部件包括能够对接合作业或分离作业时所受到的阻力进行检测的扭矩检测构件,当其所检测到的扭矩大于规定值时,所述控制部控制所述盖操作部件停止对所述盖的操作。
23.更优选地,所述移液部件包括:
24.插入部,所述插入部能够插入所述移液吸头以与该移液吸头接合,从而利用接合的所述移液吸头进行移液作业;以及
25.卸载部,所述卸载部能够相对于所述插入部移动,从而将所述移液吸头解除相对于所述插入部的接合。
26.更优选地,所述移液部件还包括用于从所述容器内抽取定量的溶液或向所述容器注入定量的溶液的微量定量取液组件。
27.通过采用上述技术方案,本发明提供了一种如下的培养操作装置。该培养操作装置包括工作台和控制部。工作台位于安全柜的无菌的工作环境中,工作台上设置有置放部件、盖操作部件、移液部件和移动部件。置放部件用于分别置放容器的容器本体、盖和多个移液吸头。盖操作部件用于操作不同的容器的盖以实现盖与对应的容器本体的接合作业和分离作业。移液部件用于选择性地接合和卸载不同的移液吸头并能够利用所接合的移液吸头对容器本体进行移液作业。移动部件用于使得盖操作部件和移液部件相对于置放部件至少在彼此正交的三个方向上进行相对移位。利用上述结构,按照预先确定的程序,控制部能够准确控制盖操作部件的接合作业和分离作业,能够准确控制移液部件选择性地接合和卸载不同的移液吸头以及进行精确定量的移液作业,并且能够精确地控制移动部件实现相对移位,从而能够取代人工作业,在细胞培养领域内节省人工,防止作业过程出现错误。
附图说明
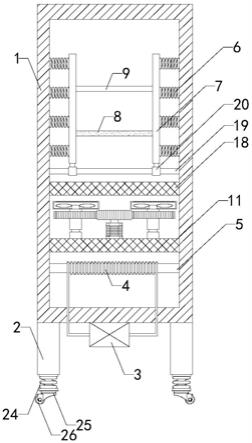
28.图1a和图1b分别是示出了根据本发明的一实施方式的培养操作装置的主视示意图和俯视示意图,其中省略了安全柜。
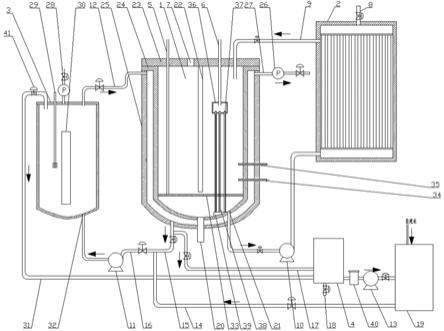
29.图2a和图2b分别示出了图1a和图1b中的局部结构,该局部结构为收容于安全柜的结构。
30.图3a和图3b分别是示出了根据本发明的一实施方式的培养操作装置的安全柜的主视示意图和侧视示意图。其中,图3a为安全柜的外装示意图,图3b的侧视示意图显示的内装部分。
31.附图标记说明
32.1控制部 11总控单元
ꢀꢀ
12移液控制单元
ꢀꢀ
13旋转控制单元
ꢀꢀ
14旋盖控制单元
ꢀꢀ
15气缸控制单元
33.2工作台
ꢀꢀ
2a工作面
34.3置放部件
ꢀꢀ
31容器本体收容部
ꢀꢀ
311固定收容部
ꢀꢀ
312可动收容部313夹持部
ꢀꢀ
32盖置放部
ꢀꢀ
321凹部
ꢀꢀ
33移液吸头收容部
ꢀꢀ
34移液吸头回收部。
35.4盖操作部件
ꢀꢀ
41接合爪
ꢀꢀ
411爪部
ꢀꢀ
42旋转组件
36.5移液部件
ꢀꢀ
51插入部
ꢀꢀ
52卸载部
ꢀꢀ
53微量定量取液组件
37.6移动部件
38.7安全柜
ꢀꢀ
71柜体
ꢀꢀ
72作业台
ꢀꢀ
73排气组件
ꢀꢀ
731进气口
ꢀꢀ
732进气过滤片
ꢀꢀ
733风机
ꢀꢀ
734排气过滤片
ꢀꢀ
735排气口
ꢀꢀ
736排气过滤片压差计
ꢀꢀ
74测量组件
ꢀꢀ
741粒子计数器
ꢀꢀ
742聚α烯烃入口侧测量阀
ꢀꢀ
75杀菌组件
ꢀꢀ
76照明组件
ꢀꢀ
77移动调节组件
ꢀꢀ
771滚轮
ꢀꢀ
772调节机构773支腿
ꢀꢀ
78操作显示部
39.c容器
ꢀꢀ
c1第一瓶
ꢀꢀ
c2第二瓶
ꢀꢀ
c3第三瓶
ꢀꢀ
cb容器本体
ꢀꢀ
cl盖t移液吸头
40.v竖直方向
ꢀꢀ
h1第一水平方向
ꢀꢀ
h2第二水平方向。
具体实施方式
41.下面参照附图描述本发明的示例性实施方式。应当理解,这些具体的说明仅用于示教本领域技术人员如何实施本发明,而不用于穷举本发明的所有可行的方式,也不用于限制本发明的范围。需要说明的是,在本发明中,“竖直方向”是指地球的重力方向(图1a中的上下方向),“第一水平方向”和“第二水平方向”是在与上述竖直方向正交的平面内的两个彼此正交的方向(第一水平方向为图1a中的左右方向、图1b中的上下方向;第二水平方向为图1b中的左右方向)。
42.以下将说明根据本发明的一实施方式的培养操作装置的结构。
43.(根据本发明的一实施方式的培养操作装置的结构)
44.如图1a至图3b所示,根据本发明的一实施方式的培养操作装置包括安全柜7以及设置于安全柜7的外部的控制部1和设置于安全柜7的内部的多个容器c、多个移液吸头t、工作台2、置放部件3、盖操作部件4、移液部件5、移动部件6。
45.在本实施方式中,容器c用于容纳细胞培养的培养基和细胞溶液等。如图1a、图1b、图2a和图2b,各容器c包括均包括形成容纳空间的容器本体cb和用于封住容器本体cb的开口的对应的盖cl。具体地,容器c分为第一瓶c1、第二瓶c2和第三瓶c3。第一瓶c1为容器本体cb的横截面为圆形的瓶(在本实施方式中的数量为5个),第一瓶c1均收容于固定收容部311。第二瓶c2为容器本体cb的横截面为长方形的瓶(在本实施方式中的数量为1个),第二瓶c2收容于可动收容部312并且可以为多层细胞培养瓶,该第二瓶c2内可以具有漏斗结构或其它有利于培养基和细胞溶液集中、流动和分布的其它结构。第三瓶c3为容器本体cb的横截面为正八边形的瓶(在本实施方式中的数量为2个),一个第三瓶c3收容于固定收容部311,另一个第三瓶c3收容于可动收容部312。
46.在本实施方式中,多个移液吸头t用于配合移液部件5从不同的容器c中定量抽取培养基和细胞溶液,并且将抽取的培养基和细胞溶液注入其它的容器c中,从而实现定量的
移液作业。各移液吸头t具有与移液部件5的插入部51配合的开口且各移液吸头t的下端部形成朝向底端渐缩的渐缩形状。
47.在本实施方式中,工作台2置于安全柜7内的作业台72上。工作台2包括沿着水平方向延展的工作面2a,在工作面2a上设置有置放部件3、盖操作部件4、移液部件5和移动部件6。
48.具体地,在本实施方式中,置放部件3用于分别置放容器c的容器本体cb、盖cl和多个移液吸头t。与容器c的容器本体cb、盖cl和移液吸头t分别对应地,置放部件3包括容器本体收容部31、盖置放部32以及移液吸头收容部33和移液吸头回收部34。
49.进一步地,容器本体收容部31用于收容对应的容器c的容器本体cb并且具有与容器本体cb的截面形状相匹配的收容空间,多个容器本体收容部31以在第一水平方向h1和第二水平方向h2成排布置的方式进行设置,使得能够尽可能地节省空间及便于作业。根据容器本体收容部31相对于工作面2a是否能够转动,容器本体收容部31包括固定收容部311以及可动收容部312。
50.固定收容部311以使对应的容器本体cb相对于工作面2a成不变的预定角度的方式保持对应的容器本体cb,在本实施方式中,固定收容部311使对应的容器本体cb的中心轴线相对于工作面2a成直角,也就是该容器本体cb的中心轴线沿着竖直方向v。这样,通过固定收容部311收容的容器本体cb的开口始终朝向竖直方向v上的上方,以便于移液部件5利用移液吸头t从容器本体cb的上方伸入容器本体cb内进行抽注作业。另外,在各固定收容部311中,设置有用于夹持容器c的容器本体cb的夹持组件,夹持组件包括第一水平方向h1能够相互接近和远离的两个夹持部313,从而能够利用两个夹持部313固定保持容器c的容器本体cb,使得容器本体cb相对于容器本体收容部31固定。这样,在利用盖操作部件4对容器c的盖cl操作使得盖cl与容器本体cb接合和分离的过程中,容器本体cb不会随着盖操作部件4的操作而自由转动。
51.可动收容部312以使对应的容器本体cb相对于工作面2a能够转动的方式保持对应的容器本体cb。在本实施方式中,用于收容第二瓶c2的可动收容部312能够绕着第一水平方向h1进行旋转,使得第二瓶c2的中心轴线能够绕着第一水平方向h1相对于工作面2a成预定角度;用于收容一个第三瓶c3的可动收容部312能够绕着第一水平方向h1和第二水平方向h2进行旋转,使得该第三瓶c3的中心轴线能够绕着第一水平方向h1和第二水平方向h2相对于工作面2a成预定角度。这样,在需要的情况下,甚至可以使得第二瓶c2和第三瓶c3的中心轴线与水平面平行配置,还可以使得第二瓶c2和第三瓶c3绕着自身的轴线转动。这样,有利于向第二瓶c2和第三瓶c3内注入培养基和细胞溶液,并且有利于培养基和细胞溶液均匀混合和分布。
52.进一步地,盖置放部32用于置放从容器c上拧下的盖cl。在本实施方式中,盖置放部32形成有与各盖cl的形状相匹配的凹部321,使得凹部321能够收容对应的盖cl。另外,为了使得系统易于识别拧下的盖cl与对应的凹部321,将盖置放部32所形成的凹部321的布局与容器本体收容部31的布局一致。也就是说,在本实施方式中,盖置放部32的凹部321与容器c收容部的盖cl的位置分别对应且各凹部321与对应的盖cl的在第二水平方向h2上的距离相等,以便于将对应的盖cl放入对应的凹部321内。
53.此外,多个容器c中的至少一部分容器c的盖cl的外周壁形成有朝向径向外侧凸起
的定位凸起(图中未示出),与该盖cl配合的凹部321的内周壁形成有与定位凸起相配合的定位凹部(图中未示出)。这样,一方面,上述定位凸起有利于盖操作部件4对盖cl的操作,另一方面上述定位凸起能够与定位凹部配合使得盖cl稳定地被保持在凹部321内。
54.进一步地,移液吸头收容部33用于收容使用前的移液吸头t。在本实施方式中,移液吸头收容部33的数量为8个且在第一水平方向h1和第二水平方向h2成阵列布置,使得使用前的移液吸头t能够紧凑地位于一个区域内,方便管理。移液吸头回收部34用于回收使用后的移液吸头t。在本实施方式中,与移液吸头收容部33类似地,移液吸头回收部34的数量为8个且在第一水平方向h1和第二水平方向h2成阵列布置,使得使用后的移液吸头t能够紧凑地位于一个区域内,方便管理。
55.在本实施方式中,盖操作部件4用于操作不同的容器c的盖cl以实现盖cl与对应的容器本体cb的接合作业和分离作业。盖操作部件4包括能够与容器c的盖cl接合且能够绕着竖直方向v双向旋转的接合爪41,接合爪41包括在盖cl的周向上均匀分布的三个多个爪部411,使得接合爪41能够将容器c的盖cl拧紧/松开。当接合爪41从外侧与容器c的安装于容器本体cb的盖cl接合之后,接合爪41朝向一个方向转动能够将盖cl从容器本体cb拧下,从而使得盖cl与容器本体cb分离;反之,接合爪41能够使得盖cl与容器本体cb接合在一起,从而封住容器本体cb的开口。盖操作部件4还包括用于使得接合爪41双向旋转的旋转组件412,旋转组件412能够利用扭矩的大小判断盖cl是否与容器本体cb牢固接合。此外,盖操作部件4还包括能够对接合爪41绕竖直方向v旋转时所受到的扭矩进行检测的扭矩检测构件。当接合爪41将盖cl拧到容器本体cb上时,扭矩检测构件所检测到的扭矩大于规定值表示盖cl已经于容器本体cb牢固接合,这时控制部1控制接合爪41松开盖cl;在接合爪41将带有定位凸起的盖cl置于凹部321的过程中,最开始往凹部321放置时,未必是处于盖cl与凹部321恰好吻合的相位。在该情况下,接合爪41一边向盖cl施加一定的向下方向的压力一边旋转,当转到盖cl与凹部321恰好吻合的相位时,盖cl会在接合爪41向下的压力下压入凹部321内。于是,接合爪41在盖cl的定位凸起的阻挡作用下无法继续带动盖cl旋转。此时,扭矩检测构件所检测到的扭矩大于规定值,于是控制部1控制接合爪41松开盖cl,并返回。另外,需要说明的是,当接合爪41将盖cl拧到容器本体cb上时,接合爪41先将盖cl朝向拧松的方向旋转一定角度(根据螺纹的各种参数确定该角度的大小)使得盖cl与容器本体cb的螺纹配合在一起,然后才朝向拧紧的方向旋转直到拧紧盖c。关于该扭矩的规定值,需要根据例如盖置放部32的表面粗糙度等条件,按照如下方式来进行设定:该规定值大于接合爪41克服将盖cl按在盖置放部32表面旋转时需要克服的摩擦力的扭矩,且小于会导致盖操作部件4在被阻挡而无法继续旋转时导致其驱动电机负载过大而导致损伤时的扭矩。
56.在本实施方式中,移液部件5用于选择性地接合和卸载不同的移液吸头t并能够利用所接合的移液吸头t对容器本体cb进行移液作业。移液部件5包括组装在一起的插入部51和卸载部52。
57.具体地,插入部51具有圆柱形状并且沿着竖直方向v延伸,插入部51具有与移液吸头t的内径相匹配的外径,使得插入部51能够插入移液吸头t内与该移液吸头t以过盈配合的方式进行牢固地接合。另外,插入部51还设置有移液孔,该移液孔能够产生抽吸力和排出力使得与插入部51接合的移液吸头t进行移液作业。
58.卸载部52套设于该插入部51且能够沿着竖直方向v相对于插入部51移动,通过卸
载部52和插入部51的相对移动能够使得移液吸头t从插入部51卸载。也就是说,相对于插入部51的相对移动的卸载部52能够顶住移液吸头t使得移液吸头t与插入部51彼此分离。
59.进一步地,移液部件5还包括不与移液吸头t接合的微量定量取液组件53,用于从容器c内抽取定量的溶液。该微量定量取液组件53具有取液头,用于对培养基和细胞溶液进行微量的取液操作,用于各种用途。
60.在本实施方式中,移动部件6用于使得盖操作部件4和移液部件5相对于置放部件3在彼此正交的竖直方向v、第一水平方向h1和第二水平方向h2三个方向上进行相对移位。具体地,移动部件6包括框架和设置于框架上的三条移动轨道,三条轨道分别沿着竖直方向v、第一水平方向h1和第二水平方向h2三个方向延伸,并且移动部件6包括使得置放部件3沿着在第一水平方向h1上延伸的轨道在预定范围内进行移位的机构和使得盖操作部件4和移液部件5沿着在第二水平方向h2上延伸的轨道和在竖直方向v上延伸的轨道在预定范围内进行移位的机构。这样,利用该移动机构,能够使得盖操作部件4与各容器c和盖置放部32的各凹部321对准,并且能够使得移液部件5与各移液吸头t、各移液吸头回收部34、各容器c的容器本体cb对准,从而能过顺利地完成各种所需的作业。
61.在本实施方式中,控制部1能够按照预定程序控制移动部件6实现相对移位,控制盖操作部件4的接合作业和分离作业,并且能够控制移液部件5选择性地接合和卸载不同的移液吸头t以及进行移液作业。具体地,控制部1包括总控单元11、移液控制单元12、旋转控制单元13、旋盖控制单元14和气缸控制单元15,这些控制单元用于控制各部件的动作,从而用于按照预定程序完成上述各种作业。
62.在本实施方式中,如图3a和图3b所示,安全柜7用于提供无菌的工作环境,工作台2设置于安全柜7内的可拆卸的作业台72上。安全柜7包括柜体71、排气组件73、测量组件74、杀菌组件75、照明组件76和移动调节组件77。
63.具体地,在本实施方式中,柜体71具有立方体形状并且内部形成无菌的工作环境,作业台72安装于柜体71的内部且呈水平方式布置。
64.进一步地,在本实施方式中,排气组件73用于使得柜体71的内部与外部连通。排气组件73包括设置于柜体71的进气口731和排气口735、设置于柜体71的位于进气口731处的进气过滤片732(在本实施方式中为2个)、设置于柜体71的位于排气口735处的排气过滤片734(在本实施方式中为1个),从而在柜体71的内外进行气体交换的过程中过滤粉尘和颗粒等。排气组件73还包括设置于排气口735的内侧的风机733,该风机733用于促进柜体71的内部与外部进行空气交换。此外,排气组件73还包括用于监控排气过滤片734的压差的排气过滤片压差计736。
65.进一步地,在本实施方式中,测量组件74用于测量柜体71的内部的预定参数。更具体地,测量组件74包括用于测量柜体71内的粉尘和颗粒浓度的粒子计数器741以及用于测量聚α烯烃输入的聚α烯烃入口侧测量阀742,从而能够为使用者提供所需的参数信息。
66.进一步地,在本实施方式中,杀菌组件75设置于柜体71并用于对柜体71的内部进行杀菌处理。具体地,杀菌组件75包括设置在柜体71的侧壁的2个杀菌灯(15瓦),从而能够有效地对柜体71的内部空间进行杀菌。
67.进一步地,在本实施方式中,照明组件76用于对柜体71的内部进行照明。具体地,照明组件76包括设置在柜体71的内部空间的顶部的3个led。
68.进一步地,在本实施方式中,移动调节组件77设置于柜体71的下部,用于移动柜体71以及调节柜体71与地面之间的角度。具体地,移动调节组件77包括多个滚轮771、调节机构772和支腿773。滚轮771有利于柜体71移动时在地面上行进。调节机构772一方面用于支撑柜体71,另一方面用于调节柜体71与地面之间的角度。支腿773放下后能够对柜体71提供支撑作用。
69.进一步地,在本实施方式中,操作显示部78设置于柜体71的外壁,用于提供柜体71内部的参数显示以及输入控制安全柜7的各部件的动作的操作指令等。
70.以上已经说明了根据本发明的一实施方式的培养操作装置的结构,以下举例说明上述培养操作装置的工作过程的示例,以下的工作过程的示例全部能够按照预先拟定的程序由根据本发明的培养操作装置至少部分地自动完成。
71.(根据本发明的一实施方式的培养操作装置的工作过程的示例)
72.需要说明的是,下述工作过程的示例中的八角瓶为上述第三瓶c3,培养基瓶、培养基回收用瓶、pbs瓶、胰酵素瓶、废液瓶可以选用上述第一瓶c1或第二瓶c2。
73.在一个示例中,可以自动地实现培养基交换的工作过程。
[0074][0075][0076]
在另一个示例中,可以自动地实现细胞回收、瓶播种的工作过程。
[0077][0078]
综上,本发明提供了一种新的培养操作装置,其并不限于上述具体实施方式所列举的示例。另外,进行如下补充说明。
[0079]
(i)虽然在以上的具体实施方式中仅举例说明了根据本发明的培养操作装置的工作过程的两个示例,但是根据本发明的培养操作装置显然不仅能够完成这两个示例,而是能够根据预定程序完成所需的其它的培养基的移液处理和细胞培养过程。
[0080]
(ii)虽然在以上的具体实施方式中说明了工作台2的工作面2a是水平的,但是本发明不限于此,可以根据需要将工作面2a设定为相对于水平面成预定角度。
[0081]
(iii)在本发明中,第一瓶c1可以全部由第三瓶c3代替,具体可以根据需要进行选择。
[0082]
(iv)虽然在以上的具体实施方式中说明了根据本发明的培养操作装置的安全柜7的结构,但是本发明不限于此,该安全柜7还可以具有所需的电源插座和电源连线,而且柜体71可以包括有利于维护的可拆装结构和有利于观察内部空间的透明结构。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。