1.本发明涉及一种植保无人机,特别涉及一种植保无人机避障时,用于增强障碍物周围雾滴覆盖的低用药量环保型智能侧喷装置,属于农业植保技术领域。
背景技术:
2.近年来,中国农用植保无人机发展迅速,全国农业航空技术95%以上用于植保作业。中国农田环境较为复杂,作业地块面积狭小、分散且形状不规则,与传统的地面行走植物保护设备相比,无人机在灵活的地形适应性和高效率方面具有明显的优势。
3.中国农田中的障碍物根据尺寸可以分为微型障碍物(如:电线,斜拉索),中小型障碍物(如:树木,水泥电线杆),大型障碍物(如:高压电塔)和非固定障碍物(如:鸟)。值得注意的是,农田中出现的障碍大多是微型障碍物和中小型障碍物。为实现植保无人机在微型障碍物和中小型障碍物环境下的安全高效完整喷雾作业,植保无人机通常采绕行方式进行避障。此时传统植保无人机的雾滴不足以完全覆盖避障绕行区域,使得障碍物周围雾滴覆盖不足,需要人工补喷以保证植保作业效果,人工与时间成本较高。同时从保护环境角度出发,迫切需要一种可以在植保无人机避障时针对避障绕行区进行喷雾的装置,提高避障绕行区的雾滴覆盖,并且该装置应提高农药利用率,减少农药用量,以满足节能环保的要求。
4.故本发明提出了一种低用药量环保型植保无人机避障智能侧喷装置,采用低用药量环保型智能喷雾系统。该装置具有侧喷倾角自适应调节技术,可以实现静电、变量、变喷雾角作业,相比较传统的非静电定量喷雾装置,可以针对性的向避障绕行区进行喷雾,所喷出的带电雾滴利用异性电荷相吸性,有效提高雾滴在作物上的附着率,实现相同植保效果的同时减少农药使用量。
技术实现要素:
5.为解决上述技术背景中传统植保无人机避障绕行时,雾滴不足以完全覆盖避障绕行区域,需要人工补喷以保证植保作业效果,人工与时间成本较高的问题,本发明提出了一种低用药量环保型植保无人机避障智能侧喷装置,以增加避障绕行区的雾滴沉积,改善障碍物周围雾滴覆盖不足的现状。
6.为实现上述目的,本发明技术方案如下:
7.一种低用药量环保型植保无人机避障智能侧喷装置,包括低用药量环保型智能喷雾系统,智能控制系统以及智能监测系统。在此三大系统作用下,该装置可以根据无人机飞控和智能控制系统所反馈的飞行状态选择性的进行喷雾。对于避障时无人机与障碍物离较近的工况,此时避障绕行区较小,该装置采用较小的喷雾角;对于避障时无人机与障碍物离较远的工况,该装置采用较大的喷雾角。无人机避障时姿态发生变化,自适应角度调节喷头安装支架可以自动进行相应姿态角补偿,确保智能可变喷雾角静电喷头始终朝向目标区域进行喷雾。实现不避障时不喷雾,减少用药量,提高环保性。避障时可以根据无人机姿态以及无人机与障碍物的相对位置,开始进行变量静电喷雾,并且智能可变喷雾角静电喷头始
终朝向目标区域,针对性的向障碍物周围喷雾,增加避障时障碍物周围区域雾滴覆盖,同时减少农药使用量,提高农药利用率和节能环保性。
8.低用药量环保型智能喷雾系统包括静电喷雾模块、调速水泵、侧喷喷头智能控制模块。静电喷雾模块包括智能可变喷雾角静电喷头、静电发生器、静电感应环、药箱。智能可变喷雾角静电喷头通过分体式圆环卡扣固定在自适应角度调节矩阵式喷头安装板上,静电感应环通过热熔胶紧配合固定在智能可变喷雾角静电喷头上,静电发生器通过尼龙螺栓固定在药箱上。相比较非静电喷雾,静电喷雾的带电雾滴利用异性电荷相吸性,可以有效提高雾滴在作物上的附着率,实现相同植保效果的同时减少农药使用量。
9.智能可变喷雾角静电喷头包括喷头主体,锥形喷雾角调节阀体,阀体调节器,雾化锥面。阀体调节器通过螺栓固定在喷头主体上,锥形喷雾角调节阀体通过o型密封圈安装在喷头主体内,阀体调节器与锥形喷雾角调节阀体之间采用螺杆进行连接。锥形喷雾角调节阀体的锥面角度与喷头主体的雾化锥面角度相同,通过阀体调节器控制锥形喷雾角调节阀体在喷头主体内的位置,从而改变喷雾角调节阀体与雾化锥面之间的间隙,实现喷雾时根据所需雾滴覆盖区的大小实时改变喷雾角。即对于避障时无人机与障碍物离较近的工况,此时避障绕行区较小,侧喷装置采用较小的喷雾角;对于避障时无人机与障碍物离较远的工况,侧喷装置采用较大的喷雾角。以达到雾滴完整覆盖目标喷雾区域的同时,减少重喷区域和雾滴飘移,提高所述一种植保无人机避障智能低用药量侧喷装置的农药利用率和环保性。而不喷雾时,锥形喷雾角调节阀体的锥面和雾化锥面相贴合,防止喷头滴漏,减少药液浪费。
10.侧喷喷头智能控制模块包括自适应角度调节喷头安装支架、舵机、角度传感器。自适应角度调节喷头安装支架分为自适应角度调节可变直径夹板和自适应角度调节矩阵式喷头安装板。
11.自适应角度调节可变直径夹板上设置有分体式夹板圆环卡扣,通过调整分体式夹板圆环卡扣的间隙,可以将侧喷喷头智能控制模块安装在不同直径的无人机机臂上。
12.自适应角度调节矩阵式喷头安装板上矩阵式布置横4竖7共计28个螺纹孔,分体式圆环卡扣通过螺栓固定在自适应角度调节矩阵式喷头安装板上,通过更换不同尺寸的分体式圆环卡扣,或者调整分体式圆环卡扣的间隙,可以适用不同尺寸的智能可变喷雾角静电喷头。
13.自适应角度调节可变直径夹板上安装舵机和角度传感器,舵机的电机轴垂直于自适应角度调节可变直径夹板,轴头连接龙门架。龙门架通过舵机连接自适应角度调节矩阵式喷头安装板和角度传感器。
14.侧喷喷头智能控制模块由智能控制系统以及智能监测系统接收预设的智能可变喷雾角静电喷头的倾角,智能可变喷雾角静电喷头在侧喷喷头智能控制模块驱动下至相应角度。喷雾过程中,当无人机发生一定角度的偏航、俯仰或横滚时,以及无人机与障碍物的相对位置发生变化时,舵机在智能控制系统和角度传感器的控制反馈下,驱动自适应角度调节喷头安装支架进行反向角度补偿,使智能可变喷雾角静电喷头保持稳定,始终朝向目标喷雾区域,提高农药利用率。
15.智能控制系统联合智能监测系统控制喷雾系统的喷雾量、喷雾角、智能可变喷雾角静电喷头的倾角和剩余药量等参数,实现一种低用药量环保型植保无人机避障智能侧喷
装置的控制、状态监控和状态回溯。
16.通过智能监测系统可以输入喷雾量,喷雾角,智能可变喷雾角静电喷头的倾角等参数,监控低用药量环保型智能喷雾系统的各个智能可变喷雾角静电喷头流量以及药箱剩余药液量,避免智能可变喷雾角静电喷头堵塞以及缺少药液造成的漏喷现象。
17.智能控制系统包括控制处理器和信号io总线;所述的控制处理器采用stm32控制器;所述的信号io总线包括飞行速度io接口、无线传输io接口、避障信号io接口、侧喷装置控制io接口;所述的信号io总线采用uorb协议与控制处理器和无人机进行通讯。信号io总线和stm32控制器焊接在同一电路板上,飞行速度io接口、无线传输io接口、避障信号io接口、侧喷装置控制io接口均采用同轴信号线与io接口总线连接。
18.智能监测系统包括流量计、液位计和监控台;流量计通过橡胶水管连接至调速水泵的出水口,液位计通过螺栓和防水胶圈安装在药箱上,监控台通过无线的方式连接至无线传输io接口,与智能控制系统通信;流量计监控智能可变喷雾角静电喷头流量,液位计监控药箱的药液量,监控台用于输入和监控喷雾量、喷雾角、智能可变喷雾角静电喷头的倾角、喷幅,同时还监控飞行速度,剩余药液量等参数。
19.调速水泵集成了水泵和调速器,并通过双层减震碳纤维板固定在药箱上。
20.一种低用药量环保型植保无人机避障智能侧喷装置,采用闭环控制方法实现变量喷雾,相比较传统的定量喷雾,闭环变量喷雾可以根据作业速度和高度实时调整用药量,减少过喷、漏喷现象,提高农药利用率。具体步骤如下:
21.步骤一:根据监控台输入预设亩用喷雾量,智能控制系统首先根据液位计判断药箱内是否有药液。若有药液,则智能控制系统根据预设亩用喷雾量、当前飞行速度、喷幅计算调速水泵所需转速,并将转速信息发送至调速器,计算关系如公式(1)。
[0022][0023]
其中q为预设亩用喷雾量,由监控台输入;s为喷幅,由智能可变喷雾角静电喷头决定,不同喷雾角的喷幅需要进行标定,并由监控台输入;v为无人机飞行速度,由智能控制系统的飞行速度io接口输入;f
rpm
为调速水泵的转速与流量之间的关系,需要标定并由监控台输入;rpm
p
为调速水泵在预设亩用喷雾量下的转速,由智能控制系统计算后输出。
[0024]
步骤二:调速器接受智能控制系统输出的转速信息,控制调速水泵工作,流量计监控实际喷雾量,并将实际喷雾量输入至智能控制系统;
[0025]
步骤三:智能控制系统将输入的实际喷雾量和预设亩用喷雾量相互对比,结合两者之间的相对误差,再次计算调速水泵所需转速并将转速信息输出至调速器。
[0026]
步骤四:重复步骤二,实现喷雾量的闭环控制。
[0027]
本发明的有益效果主要如下:本发明提出了一种低用药量环保型植保无人机避障智能侧喷装置,采用静电喷雾和变量喷雾技术,结合智能可变喷雾角静电喷头和自适应角度调节喷头安装支架以及相应的智能控制方法,与传统的非静电定量喷雾装置相比,该装置具有喷雾角可调,智能可变喷雾角静电喷头的倾角有自稳定性的特点,可以根据作业速度和高度实时调整用药量,减少过喷、漏喷现象,提高农药利用率。以上所述措施和结构及方法使得本发明提出的一种低用药量环保型植保无人机避障智能侧喷装置具有农药使用量低、农药利用率高、节能环保性好、结构紧凑、效率高、适用范围广等优点。
附图说明
[0028]
图1为本发明专利提出的一种低用药量环保型植保无人机避障智能侧喷装置在无人机上的轴视图;
[0029]
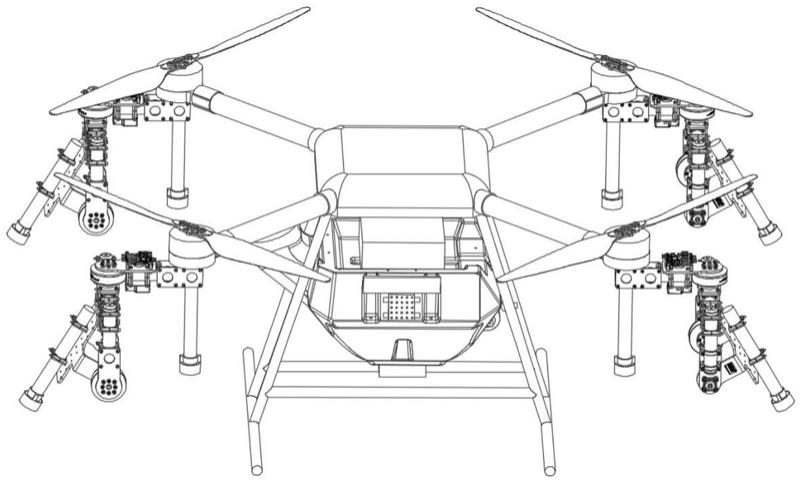
图2为本发明专利提出的一种低用药量环保型植保无人机避障智能侧喷装置在无人机上的正视图;
[0030]
图3为本发明专利提出的一种低用药量环保型植保无人机避障智能侧喷装置调速水泵轴视图;
[0031]
图4为本发明专利提出的一种低用药量环保型植保无人机避障智能侧喷装置智能可变喷雾角静电喷头剖视图;
[0032]
图5为本发明专利提出的一种低用药量环保型植保无人机避障智能侧喷装置自适应角度调节喷头安装支架轴视图;
[0033]
图6为本发明专利提出的一种低用药量环保型植保无人机避障智能侧喷装置自适应角度调节喷头安装支架正视图;
[0034]
图7为本发明专利提出的一种低用药量环保型植保无人机避障智能侧喷装置随无人机姿态调整喷头倾角示意图;
[0035]
图8为本发明专利提出的一种低用药量环保型植保无人机避障智能侧喷装置随无人机与障碍物相对距离调整喷头倾角和喷雾角示意图;
[0036]
图9为本发明专利提出的一种低用药量环保型植保无人机避障智能侧喷装置闭环控制变量喷雾逻辑图。
[0037]
图10为本发明专利提出的一种低用药量环保型植保无人机避障智能侧喷装置低用量环保型智能喷雾系统组件图。
[0038]
图11为本发明专利提出的一种低用药量环保型植保无人机避障智能侧喷装置静电喷雾模块组件图。
[0039]
图12为本发明专利提出的一种低用药量环保型植保无人机避障智能侧喷装置侧喷喷头智能控制模块组件图。
[0040]
图13为本发明专利提出的一种低用药量环保型植保无人机避障智能侧喷装置智能监测系统组件图。
[0041]
图中:1、智能可变喷雾角静电喷头;2、静电感应环;3、静电发生器;4、液位计;5、药箱;6、智能控制系统;7、调速水泵;8、自适应角度调节喷头安装支架;9、监控台;10、调速器;11、水泵;12、流量计;13、阀体调节器;14、锥形喷雾角调节阀体;15、喷头主体;16、锥角;17、雾化锥面;18、自适应角度调节可变直径夹板;19、角度传感器;20、舵机i;21、龙门架;22、角度传感器;23、自适应角度调节矩阵式喷头安装板;24、舵机ii;25、低用药量环保型智能喷雾系统;26、静电喷雾模块;27、侧喷喷头智能控制模块;28、分体式圆环卡扣;29、分体式夹板圆环卡扣;30、智能监测系统。
具体实施方式
[0042]
参照图1至图13,本发明提出了一种低用药量环保型植保无人机避障智能侧喷装置,包括低用药量环保型智能喷雾系统25,智能控制系统6以及智能监测系统30;低用药量环保型智能喷雾系统25,智能控制系统6以及智能监测系统30中的液位计4和流量计12均搭
载在无人机上,其中:
[0043]
低用药量环保型智能喷雾系统25包括静电喷雾模块26、调速水泵7、侧喷喷头智能控制模块27;静电喷雾模块26包括智能可变喷雾角静电喷头1、静电感应环2、静电发生器3、药箱5;调速水泵7集成了水泵11和调速器10;侧喷喷头智能控制模块包括自适应角度调节喷头安装支架8、舵机i20、舵机ii24和角度传感器i19、角度传感器ii22。
[0044]
智能可变喷雾角静电喷头1包括喷头主体15,锥形喷雾角调节阀体14,阀体调节器13,雾化锥面17。
[0045]
智能监测系统包括流量计12、液位计4和监控台9,流量计12监控智能可变喷雾角静电喷头1的流量,液位计4监控药箱5的药液量,监控台9用于输入和监控喷雾量、喷雾角、智能可变喷雾角静电喷头1的倾角、喷幅,同时还监控飞行速度,剩余药液量等参数。
[0046]
智能控制系统6包括控制处理器和信号io总线;所述的控制处理器采用stm32控制器;所述的信号io总线包括飞行速度io接口、无线传输io接口、避障信号io接口、侧喷装置控制io接口;所述的信号io总线均采用同轴信号接口,无线传输io接口采用两根天线,增加传输稳定性和冗余度。所述的信号io总线采用uorb协议与控制处理器和无人机进行通讯。
[0047]
智能可变喷雾角静电喷头1通过快接卡口固定在喷杆上,静电感应环2通过热熔胶连接在快接卡口上,智能可变喷雾角静电喷头1与静电感应环2同轴。静电发生器3通过绝缘双面胶固定在药箱5上,静电发生器3采用双层绝缘线与静电感应环2连接。调速水泵7进水端与药箱5出水端采用快接头连接,调速水泵7出水端连接智能监测系统中的流量计12,流量计12和智能可变喷雾角静电喷头1之间采用软管连接。智能监测系统30中的液位计4安装在药箱5底部的最低面。智能可变喷雾角静电喷头1的喷雾角信号和流量计12信号通过同轴信号线连接至智能控制系统6的侧喷装置控制io接口。
[0048]
锥形喷雾角调节阀体14安装在喷头主体15内,两者同轴,并采用双密封圈防止漏水。喷头主体15上设置进水口,进水口通过软管连接调速水泵7。阀体调节器13采用螺栓连接固定在喷头主体15上,阀体调节器13与锥形喷雾角调节阀体14之间采用螺杆的方式进行连接。锥形喷雾角调节阀体14的锥角16的角度与雾化锥面角17的角度相同,阀体调节器13通过控制锥形喷雾角调节阀体14在喷头主体15内的上下位置,从而改变喷雾角调节阀体14的锥角16与雾化锥面17之间的间隙,实现喷雾时根据所需雾滴覆盖区的大小实时改变喷雾角,达到雾滴完整覆盖的同时减少重喷区域和雾滴飘移,以提高所述一种植保无人机避障智能低用药量侧喷装置的农药利用率和环保性。并且该装置不喷雾时,锥形喷雾角调节阀体14的锥面16和雾化锥面17相贴合,防止智能可变喷雾角静电喷头1滴漏,减少药液浪费。
[0049]
自适应角度调节喷头安装支架8分为自适应角度调节可变直径夹板18和自适应角度调节矩阵式喷头安装板23。自适应角度调节可变直径夹板8采用分体式夹板圆环卡扣29将自适应角度调节喷头安装支架8固定在无人机机臂上,通过调整分体式夹板圆环卡扣29的间隙,可以适用不同直径的无人机机臂。自适应角度调节矩阵式喷头安装板23上矩阵式布置横4竖7共计28个螺纹孔,分体式圆环卡扣28通过螺栓固定在自适应角度调节矩阵式喷头安装板23上,通过调整分体式圆环卡扣28的间隙以及更换不同尺寸的分体式圆环卡扣28,可以提高智能可变喷雾角静电喷头1尺寸的适应性。
[0050]
自适应角度调节可变直径夹板18上安装舵机20和角度传感器19,舵机20的电机轴垂直于自适应角度调节可变直径夹板18,轴头连接龙门架21,龙门架21在舵机20驱动下,可
以绕自适应角度调节可变直径夹板18的垂线进行顺、逆时针旋转,角度传感器19将转动角度反馈至智能控制系统6和监控台9。
[0051]
龙门架21通过舵机24连接自适应角度调节矩阵式喷头安装板23,自适应角度调节矩阵式喷头安装板23上布置一个角度传感器22。自适应角度调节矩阵式喷头安装板23在龙门架21上的舵机24驱动下,可以绕舵机24的轴线进行顺、逆时针的角度调整。智能可变喷雾角静电喷头1在舵机20、24的驱动下,实现倾角的改变。
[0052]
在喷雾前通过监控台9输入预设的智能可变喷雾角静电喷头1的倾角,舵机20、24在智能控制系统6和角度传感器19、22的控制反馈下,将智能可变喷雾角静电喷头1旋转至相应角度。如图7所示,在喷雾过程中,当无人机姿态(偏航、俯仰、横滚)绕进行某个角度的改变时,舵机进行反向角度补偿,使智能可变喷雾角静电喷头1保持稳定。
[0053]
如图8所示,对于避障时无人机与障碍物离较近的工况,此时避障绕行区较小,智能可变喷雾角静电喷头1可以采用较小的喷雾角;对于避障时无人机与障碍物离较远的工况,则采用较大的喷雾角。并且当无人机与障碍物之间的距离不同时,在智能控制系统6、舵机20、24和角度传感器19、22的共同作用时,调整智能可变喷雾角静电喷头1的倾角,使得智能可变喷雾角静电喷头1的轴线延长线始终与障碍物底部相交。
[0054]
本发明所述的一种植保无人机避障智能低用药量侧喷装置,采用闭环控制变量喷雾,相对传统定量喷雾,闭环控制变量喷雾可有效减少农药使用量,提高了节能环保性,具体实施步骤如下:
[0055]
步骤一:根据监控台9输入预设亩用喷雾量,智能控制系统6首先根据液位计4判断药箱5内是否有药液,并将药液信息反馈至智能控制系统6。若有药液,智能控制系统6根据预设亩用喷雾量、当前飞行速度、喷幅计算调速水泵7所需转速,并将转速信息发送至调速器10,计算关系如公式(1)。
[0056][0057]
其中q为预设亩用喷雾量,由监控台9输入,经无线传输io接口传输至智能控制系统6;s为喷幅,由智能可变喷雾角静电喷头1决定,不同喷雾角的喷幅需要进行标定,将标定后的喷幅经监控台9输入至智能控制系统6;v为无人机飞行速度,由无人机经飞行速度io接口输入至智能控制系统6;f
rpm
为调速水泵7的转速与流量之间的关系,需要标定并由监控台9输入;rpm
p
为调速水泵7在预设亩用喷雾量下的转速,由智能控制系统6计算后输出。
[0058]
步骤二:调速水泵7的调速器10接受输出的转速信息,控制水泵11工作,流量计12监控实际喷雾量,经喷雾系统io接口将实际喷雾量输入至智能控制系统6;
[0059]
步骤三:智能控制系统6根据实际喷雾量和预设的亩用喷雾量相互对比,结合两者之间的相对误差,根据误差值再次计算调速水泵7所需转速并将转速信息输出至调速器10。
[0060]
步骤四:重复步骤二,实现喷雾量的闭环控制。
[0061]
以上所述,仅为本发明较佳的具体实施方案,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应覆盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

