1.本发明属于农耕设备技术领域,具体涉及一种田园作业机器人。
背景技术:
2.近年来,随着科技技术的快速发展,农业机械智能化和无人化已经成为现代农业的发展方向。目前智能化的农耕机械设备主要是针对于大面积的平原农场,对于大棚蔬菜种植,城市周边菜篮子工程(共享菜地),高档别墅后花园,农村菜园子、小块田地等田园区域,大多依然采用手工种植、耕地等农业操作,如用锄头挖坑,人工点播种子;也有少量采用小型农机,如微耕机等手扶式机械进行播种等农业操作,两种作业方式在作业过程中都会占用操作人员大量的时间和精力,且直线作业效果不理想,作业精度不高。因此需要一种智能化、无人化的农用作业机器人,在解放人类双手的同时,提高农耕作业精度,实现智能化和无人化田园作业。。
技术实现要素:
3.本发明为解决公知技术中存在的技术问题,提供一种田园作业机器人,能够在农耕作业过程中解放更多的人力,减少人工成本,提高作业效率和作业精度,实现智能化和无人化田园作业。
4.本发明的目的是提供一种田园作业机器人,包括:
5.行走机构,所述行走机构包括行走驱动底盘和车轴驱动总成模块;
6.执行不同农耕作业的作业装置功能模块;
7.安装于行走驱动底盘上,并带动作业装置功能模块完成升降动作的举升机构;
8.控制行走机构、作业装置功能模块、举升机构动作的控制系统,所述控制系统搭载在无人驾驶控制器上;其中:
9.所述控制系统包括:
10.定位控制模块,用于对田园作业机器人进行位置监测;
11.避障控制模块,通过接收避障雷达的数据,进而避开障碍物;
12.导航控制模块,通过内置的田园地图和规划完成的路径,引导行走机构的行进路线;
13.运动控制模块,控制行走机构的行驶、转向、制动、速度;
14.作业装置控制模块,控制作业装置功能模块完成农耕作业;
15.自动充电控制模块,控制田园作业机器人进行充电;
16.数据存储模块和通信模块。
17.优选地,所述行走驱动底盘包括:
18.水平方向设置的底盘支撑板一(11)和底盘支撑板二(12);
19.由横向支架一(5)、纵向支架一(7)、横向支架二(6)和纵向支架二(8)首尾依次连接组成矩形结构的外框架;
20.连接于外框架内侧的底盘固定支架一(13)和底盘固定支架二(14);所述底盘固定支架一(13)和底盘固定支架二(14)相互平行;其中:
21.所述横向支架一(5)、纵向支架一(7)、底盘固定支架一(13)和纵向支架二(8)围成左侧安装腔;所述底盘支撑板一(11)固定于左侧安装腔的底部;
22.所述纵向支架一(7)、横向支架二(6)、底盘固定支架二(14)和纵向支架二(8)围成右侧安装腔;所述底盘支撑板二(12)固定于右侧安装腔的底部;
23.所述左侧安装腔的右外侧安装有支撑轴连接架一(9);所述右侧安装腔的右外侧安装有支撑轴连接架二(10);所述支撑轴连接架一(9)和支撑轴连接架二(10)之间为作业装置功能模块拆装区;
24.所述横向支架一(5)上设有卡槽一(15)、卡槽二(16)和卡槽三(17);所述横向支架二(6)上设有卡槽四(18)。
25.优选地,所述车轴驱动总成模块包括电机(24),所述电机(24)通过减速机(25)与联轴器(27)连接,所述联轴器(27)依次通过车轮轴(30)、键(29)和车轮(28)连接;连接方管(31)嵌套在支撑轴(26)上,上连接盘(32)通过螺栓固定到连接方管(31)上,下连接盘(33)通过螺栓固定在支撑轴总成(35)下部,缓冲弹簧(34)安装在上连接(32)盘和下连接盘(33)之间;所述支撑轴(26)位于支撑轴总成(35)的内部,所述支撑轴总成(35)与车轮轴(30)之间通过联轴器(27)连接。
26.优选地,所述举升机构包括结构相同的左侧举升机构和右侧举升机构;
27.所述左侧举升机构包括:
28.连接行走驱动底盘和作业装置功能模块的连接杆一(38);
29.位于连接杆一(38)下方的连接杆二(39);
30.电推杆(36);其中:
31.所述电推杆(36)固定在纵向支架二(8)上,当电推杆内部机构升起时,电推杆(36)顶端将连接杆一(38)顶起。
32.优选地,所述作业装置功能模块包括播种装置、旋耕装置、起垄装置、除草装置、收获装置、喷洒装置。
33.优选地,还包括与所述通信模块通过wifi或4g模块进行数据交互的手持终端。
34.优选地,所述手持终端内安装有作业管理系统;所述作业管理系统包括:
35.登录模块,实现用户注册、登录、找回密码的管理功能;
36.机器人配置模块,实现机器人系统参数配置功能;
37.任务编辑模块,实现作业信息和田块信息的设置与管理功能;
38.路径规划模块,实现作业田块的路径图规划设计功能;
39.作业监控模块,实现田园机器人作业状态和运动状态的实时监控和行走轨迹的动态绘制功能;
40.查看模块,实现对历史作业数据、历史作业轨迹、数据分析的查看和管理功能;
41.设置模块,实现用户管理、权限管理、退出系统的功能;
42.帮助模块,实现检查软件更新、提供平台基本信息的功能。
43.优选地,所述作业管理系统的工作流程为:
44.s1、登录系统;具体为:
45.当首次使用时,首先进行注册,然后登录进入作业管理系统主界面;当非首次使用时,通过历史注册账号信息进行登录;
46.s2、通过机器人配置模块,配置机器人参数;
47.s3、通过任务编辑模块,进行作业设置和田块设置;
48.s4、通过路径规划模块,进行作业方向选择、边界点采集、路径规划和路径下发操作;
49.s5、通过作业控制模块,下发控制指令,使田园机器人按照接收的预定义路径开始进行导航作业;
50.s6、导航作业结束后,进行确认;
51.s7、通过查看模块,查看本次导航作业数据、作业动态轨迹、数据分析曲线;
52.s8、全部作业任务完成,通过设置模块,退出作业管理系统。
53.优选地,所述田园作业机器人的工作流程为:
54.步骤一、硬件设备搭建;
55.搭建、连接定位装置,确认定位状态是否正常,根据作业需求,在田园机器人作业装置区域安装相应的作业装置功能模块;
56.步骤二、建立远程通信连接;
57.启动田园机器人,同时登录手持终端监控系统,建立田园机器人和手持终端作业管理系统之间的远程无线通信连接;
58.步骤三、配置机器人参数;
59.首先选择目标机器人,如果机器人数据库中无当前待作业机器型号,需进行新增机器人,然后对目标机器人进行参数设置;
60.步骤四、在任务编辑模块中设置作业任务;具体包括:
61.具体的作业参数设置;
62.具体的田块参数设置;
63.步骤五、在路径规划中进行路径规划操作;具体包括:
64.选择作业方向;
65.采集田块边界点并确定作业起始点;
66.路径规划;
67.将规划后的路径信息发送给无人驾驶控制器;
68.步骤六、自动作业控制说明;
69.进入自动控制作业模式,开始作业,田园机器人自动遍历田园内所有作业路径;
70.在跟随直线路径过程中,无人驾驶控制器控制作业装置按照作业要求进行作业;
71.在转弯过程中,无人驾驶控制器控制作业装置升起;
72.田园机器人进行自动作业过程中,当避障雷达检测到障碍物时,田园机器人停止运动,同时作业装置功能模块停止作业,待障碍物移除时,田园机器人按照上次未执行完的运动指令和作业指令继续进行运动和作业;
73.全部作业完成后,田园机器人停止运动,等待确认信息,确认完成后,田园机器人退出自动控制模式,田园机器人回到待作业区等待下一次作业指令;
74.如果田园机器人电池电量低于设置的可作业电量最低限值,田园机器人机体自身
以及手持终端界面进行充电提示,且田园机器人自动前往充电站点进行充电,且此过程中不再接受其他作业任务指令;充电过程中,当田园机器人电量大于可进行作业设定值时,田园机器人可接受农田作业任务指令;
75.步骤七、查看作业数据;
76.在作业过程中,数据存储模块会自动存储采集的边界点数据、路径规划图数据、实际作业过程中的行走轨迹数据、作业面积数据;通过查看模块查看相应的作业数据、历史轨迹和数据分析图表;
77.步骤八、退出系统;
78.作业完成后,通过设置模块退出系统。
79.优选地,所述田园作业机器人采用四轮驱动。
80.本发明具有的优点和积极效果是:
81.本发明设计一款能够自主定位、行走、避障、带有作业管理系统的田园机器人,通过更换不同的工作装置实现自主旋耕、自动播种等各类农艺功能,通过搭载在手持终端的作业管理系统可实现对田园机器人作业过程的智能化操控和工作状态监控。
82.本发明相对于传统的手扶式农用机械,实现了田园无人化机械种植,车体整体设计简单实用,用户通过平板电脑等移动终端与田园机器人无线连接,控制田园机器人实现自主旋耕、播种作业,提高了作业效率和作业精度,减少了人工成本。用户通过移动终端规划田园机器人作业流程,作业路径,控制机器人工作,同时可以实时了解机器人的工作、运行状态;
83.本发明采用四轮驱动、滑移转向方式实现行驶和转向功能,驱动模块结构设计简单实用,且相对于其他结构转向方式,在不降低行驶和转弯运动效果的基础上,有效降低了费用成本;
84.本发明设计有手持终端作业管理系统,可实现对田园机器人的远程作业控制,相对于现有的人工手扶式作业机械,操作更加安全方便;
85.本发明采用电池供电形式为田园机器人提供动力,相对于汽油和柴油作为动力来源的农用机械,避免了环境污染问题,且电池供电成本要远低于烧油成本,节省了农用机械运动过程的消耗费用。
附图说明
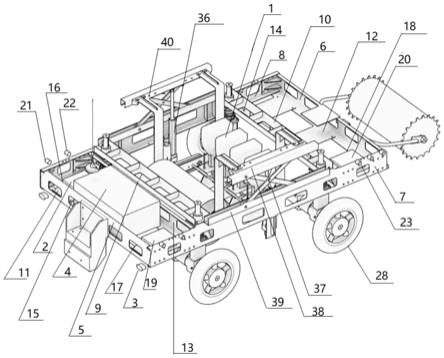
86.图1为本发明优选实施例的车体结构示意图;
87.图2为本发明优选实施例中车轮驱动总成结构示意图;
88.图3为本发明优选实施例中举升机构示意图;
89.图4为本发明优选实施例中作业装置功能模块—播种模块俯视图;
90.图5为本发明优选实施例中作业装置功能模块—旋耕模块俯视图;
91.图6为本发明优选实施例中作业管理系统操控流程图;
92.图7为本发明优选实施例中田园机器人工作流程图;
93.图8为本发明优选实施例中无人驾驶控制器功能模块构成图。
94.其中:1、作业装置功能模块;2、无人驾驶控制器;3、避障雷达;4、电源模块;5、横向支架一;6、横向支架二;7、纵向支架一;8、纵向支架二;9、支撑轴连接架一;10、支撑轴连接
架二;11、底盘支撑板一;12、底盘支撑板二;13、底盘固定支架一;14、底盘固定支架二;15、卡槽一;16、卡槽二;17、卡槽三;18、卡槽四;19、驱动控制器一;20、驱动控制器二;21、急停开关;22、电源开关;23、故障指示灯;28、车轮;36、电推杆;37、剪叉结构件;38、连接杆一;39、连接杆二;40、连接孔位。
具体实施方式
95.为能进一步了解本发明的发明内容、特点及功效,兹例举以下实施例,并配合附图详细说明如下:
96.如图1至图8所示,本发明的技术方案为:
97.一种田园作业机器人,包括:
98.行走机构,所述行走机构包括行走驱动底盘和车轴驱动总成模块;
99.执行不同农耕作业的作业装置功能模块;
100.安装于行走驱动底盘上,并带动作业装置功能模块完成升降动作的举升机构;
101.控制行走机构、作业装置功能模块、举升机构动作的控制系统,所述控制系统搭载在无人驾驶控制器上;其中:
102.所述控制系统包括:
103.定位控制模块,用于对田园作业机器人进行位置监测;
104.避障控制模块,通过接收避障雷达的数据,进而避开障碍物;
105.导航控制模块,通过内置的田园地图和规划完成的路径,引导行走机构的行进路线;
106.运动控制模块,控制行走机构的行驶、转向、制动、速度;
107.作业装置控制模块,控制作业装置功能模块完成农耕作业;
108.自动充电控制模块,控制田园作业机器人进行充电;
109.数据存储模块和通信模块。
110.本发明的田园机器人到达作业点时,根据播种、旋耕等不同作业种类对作业装置功能模块1的高度要求,通过手持终端向无人驾驶控制器2发送作业高度调节指令,无人驾驶控制器2接收到调节指令后控制电推杆35完成相应的升降动作。
111.田园机器人在自动导航作业过程中,通过定位装置获取田园机器人的各状态信息,将状态信息数据传送至无人驾驶控制器2进行数据的融合与分析,作业管理系统向无人驾驶控制器2下发操作指令,无人驾驶控制器2通过驱动器一19和驱动器二20控制田园机器人执行机构完成相应动作指令,并将作业过程中的实时数据返回给无人驾驶控制器2和作业管理系统,进而完成实时路径跟踪作业,作业管理系统对导航作业情况进行实时监控显示,作业结束后可以通过查看模块查询历史作业数据等信息。
112.上述优选技术方案主要包括控制系统、行走驱动底盘、举升机构、作业装置功能模块1、无人驾驶控制器2、定位装置、避障雷达3、电源模块4;举升机构通过连接杆二39搭载在行走驱动底盘上,作业装置功能模块1通过连接杆一38上的连接孔位40与举升机构相连,电源模块4通过底盘支撑板一上方的卡槽一15固定在行走驱动底盘上,无人驾驶控制器2通过底盘支撑板一上方的卡槽二16固定在行走驱动底盘上,定位装置固定在车身外壳上,避障雷达3安装在行走驱动底盘的横向支架一5上。
113.行走驱动底盘主要包括横向支架一5、横向支架二6、纵向支架一7、纵向支架二8、支撑轴连接架一9、支撑轴连接架二10、底盘支撑板一11、底盘支撑板二12、底盘固定支架一13、底盘固定支架二14、卡槽一15、卡槽二16、卡槽三17、卡槽四18、车轴驱动总成模块、驱动控制器一19、驱动控制器二20、急停开关21、电源开关22、故障指示灯23组成。横向支架一5的两端分别与纵向支架一7纵向支架二8的一端通过螺栓进行连接;横向支架二6的两端分别与纵向支架一7、纵向支架二8的另一端通过螺栓进行连接;底盘支撑板一11通过螺栓与横向支架一5、底盘固定支架一13、纵向支架一7、纵向支架二8进行固定连接;底盘支撑板二12通过螺栓与横向支架二6、底盘固定支架二14、纵向支架一7、纵向支架二8进行固定连接;支撑轴连接架一9的两端通过螺栓分别与两个前轮的支撑轴总成进行连接;支撑轴连接架二10的两端通过螺栓分别与两个后轮的支撑轴总成进行连接;驱动控制器一19通过螺栓固定在卡槽三17处,驱动控制器二20通过螺栓固定在卡槽四18处,并通过线束连接到电气系统中;急停开关21和电源开关22穿过纵向支架二8前端的嵌入孔位固定在纵向支架二8上,并通过线束连接到电气系统中,当遇到紧急情况需要手动停车时,可按下急停开关21,田园机器人立即停止一切动作;故障指示灯23穿过纵向支架二8后端的嵌入孔位固定在纵向支架二8上,并通过线束连接到电气系统中,当田园机器人遇到不同类型的故障时,对应的故障指示灯23会进行常亮或闪烁提示。
114.车轴驱动总成模块主要由电机24、减速机25、支撑轴26、联轴器27、车轮28、键29、车轮轴30、连接方管31、上连接盘32、下连接盘33、缓冲弹簧34、支撑轴总成35组成。田园机器人共包含4个车轴驱动总成模块。电机24通过螺栓与减速机25连接固定,减速机25通过螺栓固定到联轴器27上,车轮28通过键29和螺栓与车轮轴30固定,车轮轴30通过键固定到联轴器27上。连接方管31嵌套在支撑轴26上部,上连接盘32通过螺栓固定到连接方管31上,下连接盘33通过螺栓固定在支撑轴总成35下部,所述支撑轴26位于支撑轴总成35的内部,所述支撑轴总成35与车轮轴30之间通过联轴器27连接;缓冲弹簧34安装在上连接盘32和下连接盘33之间。田园机器人通过四轮驱动、滑移转向方式实现行走及转向功能,田园机器人进行行走、转向等动作时,无人驾驶控制器2向驱动器一19和驱动器二20发送动作控制指令,驱动器一19和驱动器二20接收到控制指令后向电机24发送控制信号,电机24接收到控制信号后驱动车轮轴30进行转动,进而带动车轮28转动,完成无人驾驶控制器2下发的行走、转向等动作任务,田园机器人在行走或转向过程中遇到冲击、震动时,通过缓冲弹簧34的弹性作用可使四个轮子28能够尽量同时着地,减缓冲击或震动对车身运动平稳性的影响。
115.举升机构包括底盘左侧举升机构和右侧举升机构,如图3所示,每侧举升机构主要由电推杆36、剪叉结构件37、连接杆一38、连接杆二39组成,连接杆一上设置有连接底盘和作业装置功能模块的连接孔位40。所述电推杆36固定在纵向支架二8上,当电推杆内部机构升起时,电推杆36顶端将连接杆一38顶起;作业装置功能模块1高度需要调整时,无人驾驶控制器作业控制模块向电推杆36发出升降控制指令,电推杆36接收到控制信号后开始执行升降动作,连接杆一38和剪叉结构37件在电推杆36的推力作用下进行升降动作,从而带动作业装置功能模块1实现自动升降功能,达到指定高度。举升机构可根据不同作业装置的作业高度需求进行自动调节,以满足不同作业种类的要求。
116.控制系统搭载在无人驾驶控制器2上,无人驾驶控制器2为田园机器人实现无人驾驶作业的核心控制部件,无人驾驶控制器2通过螺栓固定在卡槽二处,并通过线束连接到电
气系统中。控制系统除主控单元外还集成多个核心控制模块,如图8所示,控制系统包括定位控制模块、避障控制模块、导航控制模块、运动控制模块、作业装置控制模块、自动充电控制模块和数据存储模块和通信模块。定位模块主要实现精准定位功能;避障模块主要实现及时避障功能;运动控制模块可实现田园机器人的行驶、转向、制动、速度控制等功能;路径规划主要功能为设计最优作业路线,导航模块主要功能为通过导航控制算法控制田园机器人按照设定路线行驶。
117.作业装置功能模块1包括播种装置、旋耕装置、起垄装置、除草装置、收获装置、喷洒装置,作业时,可根据实际作业需求安装、更换不同的作业装置功能模块,更换作业装置时操作简单,一机多用,功能齐全,基本满足农用作业的所有功能需求。作业装置功能模块位于车体中心位置,作业装置功能模块置于外壳中,作业装置功能模块由人工从车辆侧面进行放置,通过合页旋转打开上方车罩进行挂接连接作业。
118.避障雷达3可及时检测到障碍物,并向无人驾驶控制器2发送遇障信息,无人驾驶控制器2接收到遇障信号后,遇到障碍物时田园机器人自动停止前进,避免与障碍物相撞,实现避障功能,避障距离可根据现场实际作业情况和用户需求进行更改设置。
119.田园机器人作业过程中,定位接收机接收到卫星定位信号并将其发送给无人驾驶控制器2,无人驾驶控制器2接收到定位信号后,无人驾驶控制器定位模块对接收到的定位信息进行解析处理,并将处理后的定位信息发送给无人驾驶控制器导航控制模块,无人驾驶控制器导航控制模块将田园机器人此时的位置方向信息与路径规划模块设定的路径信息进行对比,通过导航控制算法计算出田园机器人下一时刻的运动位置和方向,无人驾驶控制器导航控制模块向无人驾驶控制器运动控制模块发送下一步运动指令,无人驾驶控制器运动控制模块接收到运动指令后向驱动器一19和驱动器二20发送驱动指令,驱动器一19和驱动器二20接收到驱动指令后控制四个车轮28进行运动进而完成直线行驶和滑移转向功能,田园机器人车身进行运动的同时,无人驾驶控制器作业装置控制模块控制作业装置实现播种、旋耕等动作。
120.田园机器人作业管理系统的实现方案:
121.田园机器人作业管理系统搭载在所述手持终端上,手持终端可以是平板电脑、手机等终端设备,手持终端通过wifi/4g模块与田园机器人进行通信,操作人员可通过手持监控终端直接对田园机器人进行作业指令的下发和作业状态的监控。作业管理系统界面设计非常人性化,操作方法简单易学,适合各类人群。
122.田园机器人作业管理系统包括登录模块、机器人配置模块、任务编辑模块、路径规划模块、作业监控模块、查看模块、设置模块以及帮助模块。
123.各模块功能如下:
124.(1)登录模块:实现用户注册、登录、找回密码的管理功能。
125.(2)机器人配置模块:实现机器人系统参数配置功能。
126.(3)任务编辑模块:实现作业信息和田块信息的设置与管理功能。
127.(4)路径规划模块:实现作业田块的路径图规划设计功能。
128.(5)作业监控模块:实现田园机器人作业状态和运动状态的实时监控和行走轨迹的动态绘制功能。
129.(6)查看模块:实现对历史作业数据、历史作业轨迹、数据分析的查看和管理功能。
130.(7)设置模块:实现用户管理、权限管理、退出系统的功能。
131.(8)帮助模块:实现检查软件更新、提供平台基本信息的功能。
132.田园机器人作业管理系统的操控流程如下:
133.(1)首次使用,用户需在手持终端作业管理系统登录界面进行注册登录,进入作业管理系统主界面;
134.(2)点击机器人配置选项,配置机器人参数;
135.(3)点击任务编辑选项,进行作业设置和田块设置;
136.(4)点击路径规划选项,进行作业方向选择、边界点采集、路径规划和路径下发操作;
137.(5)点击作业控制选项,下发控制指令,使田园机器人按照接收的预定义路径开始进行导航作业;
138.(6)导航作业结束后界面弹出“作业完成”提示,点击“确认”;
139.(7)点击“查看”选项,查看本次导航作业数据、作业动态轨迹、数据分析曲线;
140.(8)全部作业任务完成,点击“设置”选项,选择“退出系统”,退出作业管理系统。
141.田园机器人工作流程:
142.(1)硬件设备搭建
143.搭建、连接定位装置,通过指示灯闪烁等方式确认定位状态是否正常,根据作业需求,在田园机器人作业装置区域安装相应的作业装置功能模块;
144.(2)建立远程通信连接
145.启动田园机器人(初始化并加载定位数据和相关传感器信息),同时登录手持终端监控系统,点击进入作业管理系统登录界面进行注册、登录,建立田园机器人和手持终端作业管理系统之间的远程无线通信连接。
146.(3)配置机器人参数
147.登录后进入作业管理系统主界面,点击“机器人配置”选项,点击“选择机器人”,从默认给定的机器人数据库中选择当前待作业机器型号;若机器人数据库中无当前待作业机器型号,需点击“新增机器人”,并完成其参数设置。
148.(4)设置作业任务
149.在作业管理系统主界面点击“任务编辑”选项,进行相应操作:
150.①
点击“任务编辑”中的“作业编辑”选项,新建作业,完成相应的作业参数设置。
151.②
点击“任务编辑”中的“田块编辑”选项,选择已建立过的田块或者新增田块,完成相应的田块参数设置。
152.(5)路径规划操作
153.在作业管理系统主界面点击“路径规划”选项,进入路径规划界面进行相应操作:
154.①
点击“选择作业方向”选项,选择适合当前田块的最佳作业方向确定方式,系统后台会根据用户所选择的方式进行最佳作业方向的计算和确定。
155.②
点击“采集田块边界点”选项,在手动控制模式下控制田园机器人采集作业区域边界点,确定作业起始点。
156.③
点击“开始路径规划”按钮,系统根据设置好的一系列参数规划出作业区域的完整作业路线,路径规划完成后桌面会弹出对话框提示,点击“确定”选项,桌面显示规划后的
路径规划图。
157.④
点击“路径下发”按钮,将规划后的路径信息发送给无人驾驶控制器。
158.(6)自动作业控制说明
159.进入自动控制作业模式,点击开始作业,田园机器人自动遍历田园内所有作业路径。
160.在跟随直线路径过程中,无人驾驶控制器控制作业装置按照作业要求进行作业;
161.在转弯过程中,无人驾驶控制器控制作业装置升起,避免在转弯过程中作业装置与地面产生摩擦接触。
162.田园机器人进行自动作业过程中,如前方一定距离内有人或其他障碍物出现时,田园机器人将自动停止运动,且作业装置同时停止作业,待障碍物移除时,田园机器人按照上次未执行完的运动指令和作业指令继续进行运动和作业。
163.全部作业完成后,田园机器人停止运动,监控界面弹出对话框提示“作业完成”,点击“确认”,完成当前作业,退出自动控制模式,田园机器人回到待作业区等待下一次作业指令。
164.如果田园机器人电池电量低于设置的可作业电量最低限值,田园机器人机体自身以及手持终端界面都会进行相应的充电提示,且田园机器人会自动前往充电站点进行充电,且此过程中不再接受其他作业任务指令;充电过程中当田园机器人电量大于可进行作业设定值时,田园机器人可接受农田作业任务指令。
165.(7)查看作业数据
166.在作业过程中,数据存储模块会自动存储采集的边界点数据、路径规划图数据、实际作业过程中的行走轨迹数据、作业面积数据,便于对田园的作业状态和作业信息进行监控和管理。在作业管理系统主界面点击“查看”选项,按照界面提示选择需要查看数据或历史轨迹的关键信息,即可查看相应的作业数据、历史轨迹和数据分析图表。
167.(8)退出系统
168.作业完成后,在作业管理平台主界面点击“设置”选项,点击“退出系统”,即退出作业管理系统。
169.(9)如需播种下一块田地,可在作业监控终端按照上一次操作的流程重新操作一遍即可,简单方便,播种效率高。
170.以上所述仅是对本发明的较佳实施例而已,并非对本发明作任何形式上的限制,凡是依据本发明的技术实质对以上实施例所做的任何简单修改,等同变化与修饰,均属于本发明技术方案的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

