1.本发明涉及害虫防治装置,特别地但不仅仅涉及杀虫装置。本发明还涉及用于害虫防治装置的致动阀、气体源和活塞组件。
背景技术:
2.害虫防治装置通常包括某种形式的触发器,该触发器对可以杀死、诱捕或捕捉动物的动力机构进行致动。害虫防治装置可以被用于控制各种害虫,包括小鼠、大鼠、白鼬、负鼠、刺猬、猫、黄鼠狼、雪貂、松鼠和浣熊。
3.考虑到许多害虫的小体型,触发器可能需要是高度灵敏的,以检测由害虫施加的相对小的力。不够灵敏的触发器可能无法致动动力机构并且可能让动物逃脱。
4.包括陷阱和毒饵站的传统的害虫防治装置通常需要手动检查以查看它们是否被动物访问过,以及捕获或杀死动物。通常,用户在很长一段时间内都不会意识到陷阱已经捕获了动物。在毒饵站的情况下,可能难以定位死去的动物,因为毒药的缓慢作用允许动物在食用毒药之后离开诱饵站区域。这可能存在健康和卫生风险,因为死去的动物可能吸引蛆虫和其他食腐动物、可能导致周围环境的污染以及可能被宠物吃掉。
5.一些害虫防治装置由压缩气体气动地提供动力。这些害虫防治装置通常使用高压、可消耗的气体筒或罐作为压缩气体源。在某些应用中,可能需要使用压缩气体的替代源。
技术实现要素:
6.根据示例性实施方式,提供了用于害虫防治装置的致动阀,该致动阀包括:
7.主阀座,该主阀座具有气体入口;
8.气体出口;
9.阀密封件,该阀密封件朝向主阀座偏置并且配置成控制气体从入口至气体出口的流动;
10.磁性元件,该磁性元件用于将阀密封件偏置成抵靠主阀座;以及
11.致动臂,该致动臂布置成在被致动时使阀密封件相对于主阀座至少部分地移位。
12.根据另一示例性实施方式,提供了用于害虫防治装置的致动阀,该致动阀包括:
13.主阀座;
14.次级阀座;
15.阀密封件,该阀密封件朝向主阀座和次级阀座偏置以形成主阀和次级阀并且配置成控制气体从主阀到次级阀的流动以及气体从次级阀的流出;
16.凹部,该凹部位于主阀座与次级阀座之间以在阀密封件相对于主阀座至少部分地移位时接收来自主阀的气体,从而促进阀密封件相对于次级阀座的移位,其中,阀密封件相对于次级阀座的移位允许气体经由次级阀流出;以及
17.致动臂,该致动臂布置成在被致动时使阀密封件相对于主阀座至少部分地移位。
18.还提供了气动致动的害虫防治装置,其包括压缩气体源、由压缩气体提供动力的气动致动器和如以上示例性实施方式中的一个实施方式所描述的致动阀。
19.根据另一示例性实施方式,提供了气动致动的害虫防治装置,其包括:
20.气动致动器;
21.第一阀,该第一阀用以控制来自第一容积的气流;
22.第二阀,该第二阀用以控制从第二容积至气动致动器的气流,该第二阀包括阀座和阀密封件,该阀密封件在就位时将第二容积与气动致动器分开;
23.气体入口,该气体入口用以将来自加压气体源的加压气体供应至第二容积,
24.其中,在第一阀致动时,气体从第一容积经由第一阀流出,这允许第二阀脱开阀密封件,使得气体从第二容积经由第二阀流动至气动致动器。
25.根据另一示例性实施方式,提供了气动致动的害虫防治装置,其包括:
26.气动致动器;
27.第一阀,该第一阀用以控制来自第一容积的气流;
28.第二阀,该第二阀用以控制从第二容积到气动致动器的气流,该第二阀包括阀座和阀密封件,该阀密封件在就位时将第二容积与气动致动器分开,
29.其中,在第一阀致动时,气体经由第一阀从第一容积流出,这允许第二阀的阀密封件从第二阀的阀座脱开,使得气体从第二容积经由第二阀流动至气动致动器,并且其中,第一阀是机电致动阀。
30.根据另一示例性实施方式,提供了气动致动的害虫防治装置,其包括:
31.气动致动器;
32.气体流动路径,该气体流动路径用以将来自加压气体源的加压气体供应至气动致动器;
33.压力传感器,该压力传感器用以感测气体流动路径中的气体压力,
34.其中,压力传感器配置成感测害虫防治装置的致动或正常运行。
35.根据另一示例性实施方式,提供了用于气动致动的害虫防治装置的加压气体源,该加压气体源包括:
36.压力传感器,该压力传感器用以感测加压气体源中的气体压力,
37.其中,压力传感器配置成感测害虫防治装置的致动或正常运行。
38.根据另一示例性实施方式,提供了气动致动的害虫防治装置,其包括:
39.压缩气体源;
40.气动致动器,该气动致动器由压缩气体提供动力,其中:
41.压缩气体源具有大于100毫升的容积;并且
42.气动致动器配置成由介于150kpa与450kpa之间的压缩气体提供动力。
43.根据另一示例性实施方式,提供了气动致动的害虫防治装置,其包括:
44.气动致动器,该气动致动器包括活塞体和孔;
45.气体入口,该气体入口用以将来自加压气体源的加压气体以介于150kpa与450kpa之间的压力供应给害虫防治装置;
46.阀,该阀用以控制至活塞体的一个或更多个表面的气流,以使活塞体基本上沿纵向方向移动穿过孔,
47.其中,活塞体的垂直于纵向方向被施加气体的表面的面积在大约0.75cm2与7cm2之间。
48.根据另一示例性实施方式,提供了气动致动的害虫防治装置,其包括:
49.气动致动器,该气动致动器包括活塞体和孔;
50.气体入口,该气体入口用以将来自加压气体源的加压气体供应给害虫防治装置;
51.阀,该阀控制气流以向活塞体施加力,从而使活塞体基本上沿纵向方向移动穿过孔,
52.其中,施加至活塞体的力在大约20n与200n之间。
53.根据另一示例性实施方式,提供了害虫防治装置,该害虫防治装置包括:
54.致动器,该致动器包括活塞体和孔,该活塞体构造成沿着纵向轴线移动穿过孔;
55.触发器,该触发器在被害虫接触时触发致动器的致动;
56.壳体,该壳体包括允许触及触发器的开口,
57.其中,触发器在纵向轴线的与开口相反的一侧,并且在静止位置处与活塞体横向地间隔开大约4mm至18mm。
58.根据另一示例性实施方式,提供了害虫防治装置,该害虫防治装置包括:
59.致动器,该致动器包括活塞体和孔,该活塞体构造成沿着纵向轴线移动穿过孔;
60.触发器,该触发器在被害虫接触时触发致动器的致动;
61.害虫引诱剂、诱饵或诱惑物,
62.其中,触发器在纵向轴线与害虫引诱剂、诱饵或诱惑物之间,并且在静止位置处与活塞体横向地间隔开大约4mm至18mm。
63.根据另一示例性实施方式,提供了用于害虫防治装置的活塞组件,该活塞组件包括:
64.活塞体;
65.基部;以及
66.拉伸弹簧,
67.其中,拉伸弹簧连接活塞体和基部并且在活塞体的静止位置中至少部分地位于活塞体内,并且拉伸弹簧构造成在活塞体纵向移动远离基部之后缩回以使活塞体返回到静止位置。
68.根据另一示例性实施方式,提供了包括如上所述的活塞组件的害虫防治装置。
69.根据另一示例性实施方式,提供了气动致动的害虫防治装置,其包括:
70.气动致动器;
71.气体贮存器,该气体贮存器包括利用周围空气对贮存器加压的泵;以及
72.阀,该阀控制从气体贮存器至气动致动器的气流。
73.根据另一示例性实施方式,提供了气动致动的害虫防治装置,其包括:
74.壳体;
75.气动致动器,该气动致动器位于壳体内;
76.加压气体贮存器,该加压气体贮存器结合到壳体的至少一部分中;以及
77.阀,该阀位于壳体内以控制从气体贮存器至气动致动器的气流。
78.根据另一示例性实施方式,提供了害虫防治组件,该害虫防治组件包括:
79.气体源,该气体源包括气体贮存器和利用周围空气对贮存器加压的泵;
80.气动致动的害虫防治装置,该气动致动的害虫防治装置包括气动致动器和用以控制从贮存器至气动致动器的气流的阀;以及
81.气体流动管线,该气体流动管线连接在贮存器与害虫防治装置之间。
82.根据另一示例性实施方式,提供了用于害虫防治装置的致动阀,该致动阀包括:
83.主阀座;
84.次级阀座;
85.阀密封件,该阀密封件朝向主阀座和次级阀座偏置以形成主阀和次级阀并且配置成控制气体从主阀到次级阀的流动以及气体从次级阀的流出;
86.凹部,该凹部位于主阀座与次级阀座之间以在阀密封件相对于主阀座至少部分地移位时接收来自主阀的气体,从而促进阀密封件相对于次级阀座的移位,其中,阀密封件相对于次级阀座的移位允许气体经由次级阀流出;以及
87.触发器,该触发器布置成在被致动时使阀密封件相对于主阀座至少部分地移位。
附图说明
88.包含在说明书中并且构成说明书一部分的附图图示了本发明的实施方式,并且与上面给出的本发明的总体描述和下面给出的实施方式的详细描述一起用于解释本发明的原理。
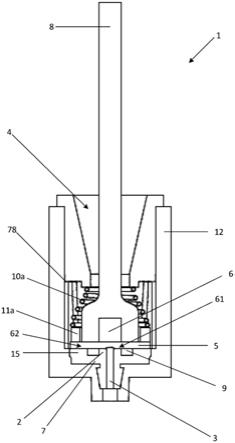
89.图1示出了示例性致动阀的横截面。
90.图2示出了替代的示例性致动阀的横截面图。
91.图3示出了另一替代的示例性致动阀的横截面图。
92.图4示出了示例性致动阀基部的立体图。
93.图5示出了示例性害虫防治装置的后视图。
94.图6示出了示例性害虫防治装置的横截面侧视图。
95.图7示出了示例性害虫防治装置的横截面侧视图。
96.图8示出了泵组件的横截面立体图。
97.图9示出了示例性害虫防治装置和气体源的示意图。
98.图10示出了示例性害虫防治装置信息和监测系统的示意图。
具体实施方式
99.害虫防治装置可能缺乏可靠致动所需的灵敏度,尤其是对于小型目标动物、比如小鼠和大鼠而言。害虫防治装置可能还需要持续监测以确定其是否正确操作以及其是否成功捕获或杀死害虫。害虫防治装置可能还需要使用可消耗的气体源。
100.因此,提供了害虫防治装置和用于害虫防治装置的致动阀,其可以具有改进的灵敏度和/或适用于小型动物、比如小鼠和大鼠。本文还提供了可以减少对害虫防治装置的手动检查或清理的需要的害虫防治装置。还提供了可以通过一系列压力源提供动力的害虫防治装置。还提供了害虫防治装置以及信息和监测系统,其可以向消费者和/或害虫防治操作者提供害虫防治装置的改进的监测和管理。还提供了用于害虫防治装置的气体源。还提供了用于害虫防治装置的活塞组件。
101.图1示出了用于害虫防治装置的致动阀1的示例性实施方式。致动阀1包括具有气体入口3的主阀座2。致动阀1还包括气体出口4和阀密封件5。主阀座2和阀密封件5共同形成主阀61,该主阀控制气体从气体入口3经由次级阀62至气体出口4的流动。将会理解的是,可以根据应用在致动阀1中使用各种类型的阀座。例如,主阀座2可以具有平坦的表面、圆形的表面或相对尖锐的“刀口”表面或边缘。主阀座2可以是环形的或者主阀座2可以是围绕一个或更多个狭缝的长形座,或者可以是任何其他合适的形状。在该示例中,主阀座2是具有刀口的环形阀座。座2的薄的“刀口”部分与阀密封件5接触的面积相对较小,这可以改善密封性。入口3可以相对较小。在一个示例中,入口在大约0.8mm与大约1.2mm之间、例如1.0mm。
102.阀密封件5可以由能够与阀座形成合适的密封性并且当阀1被致动时允许气体从气体入口3流动至出口4的任何材料形成。阀密封件5可以由柔性材料比如硅树脂、橡胶、模制热固性材料或热塑性弹性体比如海翠形成。在该示例中,阀密封件5是硅树脂。
103.阀密封件5可以是适合于密封主阀和次级阀——在提供次级阀的情况下——的任何形状。在一个示例中,阀门密封件呈盘状件或隔膜的形式。
104.阀密封件5通常被偏置抵靠主阀座2以在未致动状态下限制气体的流动并且在致动时允许流动。偏置还可以帮助在致动之后复位阀密封件。偏置可以通过磁性元件、一个或更多个弹簧、气体压力、螺线管或其他合适的器具来提供。偏置优选地通过磁性元件之间的吸引来提供。磁性元件由于它们的力的分布而可以是特别有利的——磁性元件之间的吸引力随着间隔的增加而迅速降低。这可以允许在致动期间快速打开阀密封件5。在一个示例中,磁性元件包括一个或更多个永磁体6。永磁体6可以被安置在阀密封件5的背面处(与阀座相反的一侧)和/或被安置在阀座2的区域中。磁性元件还可以包括一种或更多种顺磁性的或铁磁性的材料。在优选的组合中,磁性元件包括位于阀密封件5的背面处的永磁体6和形成主阀座2和/或次级阀座15的不锈钢基部7。
105.致动阀1还包括致动臂8,该致动臂可以用于在接触时致动阀。致动臂可以将阀门密封件5从主阀座2至少部分地移位。存在适合于将阀门密封件5从主阀座2移位的各种布置的致动臂8。例如,致动臂8可以靠着阀密封件5的背面、可以直接或间接地连接至阀密封件5、或者可以压在阀密封件5的侧面上以对其施加横向力。致动臂8可以被连接至一个或更多个偏置元件。例如,致动臂可以被连接至一个或更多个弹簧或磁性元件。在优选的布置中,致动臂8连接至永磁体6,该永磁体通过该永磁体6与不锈钢基部7之间的力提供抵靠密封件5的偏置。永磁体可以被保持在磁体保持件中或者可以直接连接至致动臂8。
106.致动臂8可以根据应用由各种材料形成。致动臂8可以是由塑料、碳纤维、弹簧丝或其他合适的材料制成。致动臂8优选地由轻质材料形成。致动臂8优选地具有低的总质量。这可以降低致动阀1由于振动和其他移动使致动臂8移位并且因此使阀密封件5移位而致动的可能性,因为致动臂8的低惯性质量和惯性矩将在分别为线性加速度和旋转加速度的情况下引起相对较小的力和扭矩,这将不太可能克服阀密封件5上的偏置力。在优选实施方式中,致动臂8可以是轻质塑料杆。
107.致动臂8可以构造成通过倾斜、纵向或横向平移或这些运动的某些组合来移动以使阀密封件5从主阀座2移位。这可以允许致动阀1响应于根据害虫防治装置的配置和目标害虫的类型/行为在不同点处或不同方向上施加至致动臂8的不同的力、例如臂8的倾斜、推动或拉动而被致动。在优选的布置中,致动臂8构造成在横向力被施加至致动臂8时主要倾
斜以使阀密封件5移位。这可以允许阀密封件5在施加相对低的横向力时通过利用由致动臂8的被施加横向力的长部分和致动臂8的被施加偏置的较短部分形成的自然杠杆而移位。当倾斜时,致动臂8可以部分地或完全地克服将阀密封件5偏置成抵靠主阀座2的偏置。这可能导致阀密封件5由于在入口3的区域中施加至阀密封件5的气体压力而移位。
108.致动阀1可以被构造成在向致动臂8施加合适的力时致动。对阀进行致动所需的力的水平可以通过例如调节致动臂的长度、偏置元件的强度和/或类型、偏置元件的位置、致动臂的相关杠杆臂的长度等中的一者或更多者来配置。致动所需的力可能取决于应用和目标物种。在一个示例中,致动阀构造成在向致动臂施加大约3克与大约12克之间的力时致动。该范围可能适用于小型目标物种、比如小鼠。在一个示例中,致动阀构造成在向致动臂施加大约10克与大约50克之间的力时致动。该范围可能适用于大型目标物种、比如大鼠。
109.致动阀1可以包括由次级阀座15和阀密封件5形成的次级阀62。在这种布置中,主阀61控制来自气体入口3的气体的流动,而次级阀62控制至气体出口4的气体的流动。将会理解的是,主阀61、次级阀62可以有许多可能的布置。例如,阀可以沿着长形的流动路径或管线顺序地布置。在主阀61与次级阀62中间还可以有另外的阀或其他流动控制器或凹部。在优选的实施方式中,次级阀62围绕着主阀61,使得从主阀61径向流出的气体可以流动至次级阀62,次级阀62控制气体向出口4的进一步流动。
110.次级阀座15可以具有平坦的表面、圆形的表面和/或包括相对尖锐的“刀口”。次级阀座可以是环形的、或者它可以是围绕一个或多个狭缝的长形的座、或者任何其他合适的其他形状。次级阀座可以部分地或完全地围绕主阀座。
111.可以提供一个或更多个偏置元件以将阀密封件5偏置成抵靠次级阀座15。该偏置还可以帮助在致动之后将阀密封件5复位。偏置元件可以由一个或更多个弹簧、一个或更多个磁性元件、气体压力、螺线管或其他合适的偏置元件提供。在该示例中,偏置元件包括弹簧10a。弹簧10a可以绕致动臂8设置。弹簧10a可以在阀密封件5的外边缘附近施加其偏置。弹簧10a可以是压缩弹簧。致动阀1可以包括在弹簧10a与阀密封件5之间的垫圈11a。在一个实施方式中,弹簧10a被用于结合磁性元件来帮助将阀密封件5偏置成抵靠次级阀座15,磁性元件帮助将阀密封件5偏置成抵靠主阀座2。在该示例中,弹簧10a和磁性元件中的一者或两者可以在致动之后帮助将阀密封件5复位在主阀座2和次级阀座15上。在图1的示例中,弹簧10a是金属弹簧并且是从致动阀分开的部件。在图2的示例中,弹簧10b与致动阀的其他部分、例如垫圈11b一体地形成。
112.致动阀1可以包括位于主阀座2与次级阀座15之间的凹部9。当阀密封件5从主阀座2至少部分地移位时,凹部9可以接收来自主阀61的气体,这可以促进阀密封件5从次级阀座15的移位。凹部9可以部分地或完全地围绕主阀座2。在优选的布置中,凹部9是基部7中的环形凹部,其围绕主阀座2并且被次级阀座15围绕。这意味着从主阀61流动至次级阀62的所有气体都将流经或流过凹部9。凹部9在优选的示例中具有相对大面积的敞开的上侧,使得与阀密封件5的与气体入口3相邻的部分相比,阀密封件5与凹部9相邻的的部分相对较大。这意味着,当加压气体从气体入口3流动至凹部9时,由于:力=压力
×
面积的关系,施加到阀密封件5的力可能会基于这些面积的比值而增加。由于填充凹部9的气体使整个环形凹部9的压力基本均匀,因此可以绕阀密封件5相对均匀地施加力。这可以允许阀密封件5相对于主阀座2的小的移位导致阀密封件5相对于次级阀座15的大的、快速的移位以及来自气体入
口3和离开气体出口4的大的、快速的气体的流动。在替代布置中,凹部9可以设置在阀密封件5中,并且主阀座2与次级阀座15之间的区域可以是平坦的或者也可以包括凹部。在一个示例中,阀密封件5的与凹部9相邻的部分的面积是与阀密封件5的气体入口3相邻的部分的面积的大约25倍至大约100倍之间。例如,阀密封件5的与凹部9相邻的部分的面积可以是阀密封件5的与入口3相邻的部分的面积的大约50倍。
113.如图4所示,也可以在基部7中设置一个或更多个压力平衡槽13。这些允许来自凹部9的气体在致动阀1的致动以及阀密封件5在次级阀座15上的至少部分复位之后排出。这可以降低凹部9中的压力并且帮助或允许阀密封件5的复位、尤其是复位在主阀座2上。在该示例中,存在横截面尺寸为0.1mm
×
0.2mm的三个槽13。根据应用可以使用多个槽13和多个尺寸的各种组合,例如存在1至5个槽。槽可以具有任何合适的尺寸。在一个示例中,槽的横截面在0.1mm
×
0.1mm与1mm
×
1mm之间。替代性地,阀的基部7可以包括多孔元件以允许来自凹部9的气体在致动之后排出。多孔元件可以位于次级阀座15上或者结合到阀座15中。在一个示例中,多孔元件是位于阀座上的多孔盘或多孔环。多孔环具有比凹部的外径大的内径以允许多孔环位于次级阀座15上并且围绕凹部9。多孔环具有比主阀座2的外径大或者至少比主阀座2的刀口或唇缘的直径大的内径。这意味着环不会位于阀密封件5与主阀座(的至少部分)之间,这可以允许阀密封件5在主阀座2上形成基本气密的密封。多孔元件可能比具有位于其中的槽13的阀座15更容易制造。在一些实施方式中,相比于槽,多孔元件还可以提供对从凹部9流出的气体的更一致的控制。
114.在一个替代性的示例中,多孔元件可以位于次级阀座15本身的一侧中,使得在凹部9的外壁之间穿过阀座15提供气体流动路径。在另一替代性的示例中,次级阀座15的上表面可以提供多孔元件。例如,表面可以被粗糙化或滚花,使得其与阀密封件5形成不太完全气密的密封以允许一些气体流出凹部9。在另一替代性的示例中,阀密封件5可以至少在次级阀座15的区域中是多孔的。例如,阀密封件5可以由多孔材料的盘制成。在该示例中,阀密封件在入口3的区域中可以是无孔的,使得其可以与主阀座2形成基本气密的密封同时仍然允许气体从凹部9流出。
115.将会理解的是,槽11或多孔元件被布置成当次级阀关闭时允许有限量的气体从凹部9流动。当主阀61至少部分地打开时,气流的量可以足以允许气体从凹部9排出,但并不能大到防止气体在阀密封件5后面积聚。
116.该示例中的致动阀1包括壳体12。壳体12可以包括允许在致动时从致动阀1流出气体的孔或狭槽。在所示的示例中,壳体12包括形成致动阀1的出口4的一部分或通向致动阀1的出口4的通道78。
117.图3示出了其中致动臂8被电子致动器79代替的示例致动阀。电子致动器79还可以代替使阀密封件5朝向基部7偏置的一个或更多个偏置器具。例如,电子致动器79可以是螺线管,其中,电枢在静止、未致动状态下保持抵靠阀密封件5(即朝向基部7)。为了对阀进行致动,电流流过螺线管的线圈以使电枢移动远离阀密封件5并且允许阀密封件从主阀座2和/或次级阀座15抬起。在另一示例中,电子致动器可以是通过施加电压而被致动的压电换能器。电子致动器79的使用可以允许各种不同类型的检测器检测动物,而不是通过与致动臂的直接物理接触检测动物。例如,红外或可见光相机可以与电子控制器结合用于检测害虫动物,并且控制器可以向电子致动器79输出控制信号以致动阀1。电子致动器可以需要通
过由入口3处的加压气体和阀密封件5上的偏置器具施加的力的不太精确的平衡提供对害虫防治装置的致动阀和下游致动的更好的控制。这可以允许使用更大面积的入口3,这可以改善害虫防治装置的致动。
118.图1的示例致动阀1的操作如下。首先,加压气体通过主阀61被保持在气体入口3的后面,主阀61通过磁体6与基部7之间的磁吸引被偏置关闭,从而将阀密封件5偏置成抵靠主阀座2。经由压力平衡槽13和出口4与环境连通的凹部9近似地处于大气压。次级阀62也通过弹簧10a关闭,弹簧10a经由垫圈11a将阀密封件5偏置成抵靠次级阀座15。当致动臂8受到干扰时,致动臂会倾斜或抬起以减小施加到在主阀61区域中的阀密封件5的力。气体入口3处的气体的压力使阀密封件5从主阀座2部分地或完全地脱开,这允许气体从气体入口3流动至凹部9。这增加了凹部9中的压力。凹部9中的压力增加,直到足以将阀密封件5从次级阀座15中抬起到至少一个区域中,从而打开次级阀62并且允许气体从入口3经由主阀和次级阀、出口4排出。该排出可以被用于触发害虫防治装置的致动,如下文将详述的。
119.图5至图7示出了一个示例中的气动致动的害虫防治装置20。害虫防治装置20可以包括参照图1至图4详细描述的致动阀,或者害虫防治装置可以包括不同的致动机构。害虫防治装置20被示出为其可以在具有气体源25、诱饵和壳体22的领域中使用。
120.如图6和图7中的最佳所示,在该示例中,害虫防治装置壳体22具有开口70,该开口允许动物进入并且与触发器接触或被害虫防治装置20的检测器以其他方式检测。在下面详细描述的示例中,触发器以致动臂8的形式提供。害虫防治装置20还包括气动致动器21,该气动致动器被布置成在动物与触发器接触或通过检测器检测到动物时被致动。该示例中的气动致动器21包括活塞体36,活塞体在被致动时移动穿过孔39以撞击动物。图5中的虚线表示活塞体处于其致动位置36'。致动臂8可以位于气动致动器21的与开口70相对的一侧,使得从开口70行进至致动臂8的动物在其接触致动臂8时其身体的一部分将位于气动致动器21下方。可以基于目标动物的尺寸来选择间隔。在一个示例中,致动臂8在静止(未致动)位置时可以与活塞体36横向地间隔开大约4mm至大约8mm、优选地大约6mm。就小鼠来说,大约6mm的间隔对于允许活塞体36撞击动物的头骨从而可靠且人道地杀死它可能是有效的。在一个示例中,致动臂8在静止(未致动)位置时可以与活塞体36横向地间隔开大约5mm至大约18mm、优选地大约10mm。就大鼠来说,大约10mm的间隔对于允许活塞体36撞击动物的头骨从而可靠且人道地杀死它可能是有效的。
121.还可以构造对气动致动器的致动进行触发所需的触发器的至少一部分的横向偏转。在一个示例中,致动臂8可以构造成当接触部分——例如致动臂8的端部附近的部分——从其静止位置偏转大约2mm至大约8mm,或大约4mm至大约6mm时触发气动致动器的致动。就小鼠来说,大约4mm至大约6mm的偏转对于检测处于正确位置的小鼠以用于可靠和有效的杀死可能是有效的。在一个示例中,致动臂8可以构造成当接触部分——例如致动臂8的端部附近的部分——从其静止位置偏转大约4mm至大约12mm,或大约8mm至大约10mm时触发气动致动器的致动。就大鼠来说,大约8mm至大约10mm的偏转对于检测处于正确位置的大鼠以用于可靠和有效的杀死可能是有效的。
122.害虫防治装置20可以包括位于区域24中的害虫引诱剂、诱饵或诱惑物以激励动物进入。触发器可以位于活塞体36与引诱剂、诱饵或诱惑物之间,使得朝向引诱剂、诱饵或诱惑物行进的动物可以在其朝向引诱剂、诱饵或诱惑物的途中与触发器形成接触。引诱剂、诱
饵或诱惑物的类型可以根据情况和目标动物而变化。
123.各种类型的气体源25可以与害虫防治装置一起使用。例如,气体源可以是适合保持足够气体用于至少一次致动的任何容积。例如,气体源可以是小罐、相对大的瓶子或其他通用或定制的容器。在图6和图7的示例中,气体源25被描绘为直接附接至害虫防治装置20或形成害虫防治装置20的一部分的相对大的、相对低压的瓶子。气体源25可以具有大于大约100毫升、大于大约300毫升、大于大约1000毫升或大于大约3000毫升的容积。将会理解的是,气体源的容积越大,对于给定压力可以实现的致动次数越多。例如,大约100毫升的小型气体源可以实现1次至5次之间的致动或大约2次或3次致动,而大的容积可以实现更多次的致动。在一些示例中,气体源定尺寸成允许大约15次至大约25次之间的致动,或大约20次致动。气体源25可以包括泵80,用于允许其被手动泵送足够的操作压力。如图8所示,泵80可以包括手柄81、活塞82和用于防止气体源25中的气体超过期望值的超压阀83。气体源25还可以包括电子模块72。电子模块72可以包括例如压力传感器、加速度计、环境传感器、通信电路、控制电路和电池中的一者或更多者。
124.如图9的示例中所示,气体源25可以是经由流动管线45连接至害虫防治装置20的单独的气体源。例如,气体源25可以是普通塑料软饮料瓶或其他便宜且容易获得的容器。替代性地,气体源25可以是与害虫防治装置20或可消耗的筒或罐86一起使用的专用瓶85。气体源25可以使用泵80或替代性的泵、比如自行车泵或杂草喷雾型泵用气体填充至操作压力。
125.害虫防治装置20可以构造成用不同压力的气体源操作。例如,它可以由处于低压的气体——比如可以装在普通塑料瓶中的气体——驱动,或者通常由在气体罐中获得的处于高压的气体驱动。害虫防治装置20可以构造成使用在大约150kpa与大约450kpa之间加压的气体来操作。这种压力可能足以杀死目标动物。该压力也可以足够低,使得气体在该压力下可以安全地保持在塑料瓶或类似的气体源中。
126.害虫防治装置20或气体源25可以设置有压力调节器87以控制从气体源25供应到害虫防治装置的气体的压力。当气体源25是高压气罐86时,这可以是特别有用的。替代性地,压力调节器可能不是必需的,并且气体源25例如由于超压阀83的操作而可以以用以在害虫防治装置20中使用的可接受的限度内的压力来供应气体。
127.害虫防治装置20的活塞体36可以具有下述表面:气体被施加到该表面以在致动时驱动活塞体36移动穿过孔39。向活塞体36施加加压气体导致力作用在活塞体36上并且导致活塞体36纵向移动穿过孔39。力的大小可以取决于活塞体36的表面面积的分量,其中,加压气体垂直于纵向方向施加于该表面面积。在一个示例中,该面积在大约0.75cm2与大约7cm2之间。在一个示例中,该面积在大约1.5cm2与2.5cm2之间。将会认识到的是,该面积越大,由给定压力的气体施加到活塞体36上的力就越大,或者等效地,在活塞体36上实现给定的力所需的压力越低。
128.在一个示例中,害虫防治装置20构造成向活塞体36施加大约20n与200n之间的力。在一个示例中,害虫防治装置20构造成向活塞体36施加大约24n与大约76n之间的力。大约24n与大约76n之间的力对于杀死小型害虫、比如小鼠而言可以特别有用。大约50n与大约200n之间的力对于杀死大型害虫、比如大鼠而言可以特别有用。
129.图6详细示出了示例气动致动的害虫防治装置20的气动机构的横截面。害虫防治
装置20在该示例中包括气动致动器21、第一阀63、第二阀64、气体入口88以及第一容积31和第二容积32。在该示例中,气体入口(在图6中仅部分可见)形成从气体源25至第二容积32的气体连通路径。入口88允许气体从气体源25内的贮存器流动至害虫防治装置20的其余部分。可以使用各种类型的第一阀63。在一个示例中,第一阀63可以是参照图1和图2所描述的致动阀。第一阀63可以控制气体从第一容积31至装置外部的流动。第一容积31可以定位成与第二阀64的阀密封件26相邻。
130.第二阀64包括阀座66和阀密封件26,阀密封件26在就位时将第二容积32与气动致动器21分开。在该示例中,阀密封件26是柔性密封件。柔性密封件可以由橡胶或其他柔性材料制成。阀密封件26可以具有小的放气孔33,用于允许第一容积31与第二容积32之间的有限的气体连通。放气孔可以是适合于允许气体以足够低的速率从第二容积32流动至第一容积31的任何尺寸,该足够低的速率在致动期间仍然允许阀密封件26的脱开。在一个示例中,放气孔33的直径可以小于1mm。
131.阀密封件26可以具有用于允许管道28穿过阀密封件26并且在第一阀63打开时允许气体从第一容积31流动至第一阀63的孔。第一阀63被布置成控制气体从第一容积31经由管道28流出害虫防治装置20(例如进入环境)。阀密封件26在正常的、未致动状态下被偏置到关闭位置中。
132.在该示例中,气动致动器包括活塞组件,该活塞组件包括当加压气体被施加到一侧和基部65时移动穿过孔39的活塞体36。活塞组件可以包括弹簧35以在致动之后使活塞体36缩回到静止位置。在致动期间,活塞体36可以纵向地移动远离静止位置。弹簧35可以在该运动期间伸出,使得在致动位置36',弹簧35提供恢复力以使活塞体36返回到静止位置。弹簧35可以是拉伸弹簧,但也可以通过适当的修改而使用压缩弹簧。在一个示例中,活塞体36包括腔并且弹簧35连接在活塞体36的腔内并且至少部分地驻留于活塞体36的腔内。这可以帮助在制造和组装期间处理活塞体36或活塞组件,因为被封围的弹簧可能不会彼此缠绕。这可能特别适用于自动组装情况,其中,处理弹簧对于机器人夹持器和组装装置是特别有挑战性的。弹簧35可以是拉伸弹簧,其中线圈在完全缩回状态下基本彼此相邻。然后弹簧可以呈现由线圈形成的基本上封闭的表面。这可以帮助在制造和组装期间处理弹簧,因为弹簧的基本上封闭的表面可能不会彼此缠绕。弹簧35的一个端部可以在腔内被连接至活塞体36,并且弹簧35的另一端部可以被连接至活塞基部65,该活塞基部在致动期间不会移动穿过孔39。在示出的示例中,活塞基部65包括长形部分37和凸缘38,长形部分37在未致动状态下至少部分地伸出到活塞体36的腔中以及对弹簧35进行保持,凸缘38位于形成孔39的一部分的保持架39a上。凸缘38包括开口,用于当第二阀64打开时允许气体从第二容积32传递至活塞体36。活塞体36可以包括位于腔内的长形部分以对弹簧进行保持。基部65和活塞体36的长形部分中的一者或两者均可以具有适当地定尺寸成用于使弹簧35旋拧到其上的螺纹。
133.害虫防治装置20可以包括两件式壳体。两件式壳体可以包括下壳体29和上壳体30。在图5至图7的示例中,气瓶可以用作或可以包括上壳体30。下壳体29和上壳体30在彼此连接时可以封围第一容积31、第二容积32、第一阀63和第二阀64中的一者或更多者。下壳体29和上壳体30可以直接彼此拧紧,或者可以包括用于接纳螺钉以将壳体旋拧在一起的螺纹部分。替代性地,它们可以具有卡扣配合或其他合适的联接。第二阀64的阀密封件26可以在下壳体29与上壳体30之间提供密封。阀密封件在其外边缘处可以具有较厚的部分以提供这
种密封。在该示例中,第二阀64的阀密封件26是圆形的并且在其周边处具有较厚的部分以在下壳体29与上壳体30之间提供o形环型密封。在该示例中,下壳体29和上壳体30封围第一容积31、第二容积32和第二阀64。第一阀63位于下壳体29的下侧的凹部中。
134.害虫防治装置20可以包括用于防止致动器21以高于或低于期望范围的压力致动的一个或更多个安全装置。安全装置可以包括超压安全装置和/或欠压安全装置。安全装置(一个或多个)可以确保人道且有效地杀死动物。安全装置可以确保害虫防治装置的正确且可靠的操作。
135.超压安全装置可以被布置成当压力超过上阈值时使气体从一个或更多个容积中释放。在一个示例中,超压安全装置是超压阀83。在一个示例中,超压阀83是气体源25的一部分。在另一示例中,超压安全装置是害虫防治装置20的一部分并且用作泄压阀。在一个示例中,当第一容积31中的压力处于足以克服将阀密封件5保持在主阀座2上且至少部分地打开阀63的偏置的压力下时,害虫防治装置20的第一阀63可以通过从装置20排出气体而充当泄压阀。
136.欠压安全装置可以被布置成在压力低于下阈值时防止致动器21的致动。例如,害虫防治装置20、气体源25或气体流动管线45可以包括连接至螺线管致动器的电子压力传感器,该螺线管致动器选择性地防止或允许气动致动器21的运动。当传感器检测到压力低于下阈值时,螺线管可以移动以使卡扣与气动致动器21接合,从而防止其移动。当传感器检测到压力高于下阈值时,螺线管可以移动以释放卡扣并且允许气动致动器21的运动。在一个示例中,压力传感器可以位于电子模块72中。在另一示例中,欠压安全装置在孔39中可以呈突起的形式,气动致动器移动穿过该孔。例如,突起可以是被偏置到气动致动器的孔中的弹簧加载的止动件。突起可以具有与孔壁成相对陡峭的角度的一个侧部,该侧部布置成面向气动致动器的活塞体36的远端部或活塞体36中的凹部的远端表面。具有陡峭的角度的侧部可以被布置成压靠活塞体36的远端部或凹部的表面以在对活塞体进行驱动的压力小于下阈值时阻止活塞体穿过孔的运动。当压力高于阈值时,活塞体36可以克服弹簧的偏置,将止动件推出孔39中的阻挡位置并且移动穿过孔39。一旦活塞体36返回至其未致动位置,止动件就可以移动回到孔39中的阻挡位置。
137.在另一种布置中,第一阀63可以是例如如结合图3所描述的电子阀。在该布置中,害虫防治装置20、气体源25或流动管线45中的压力传感器可以向对电子致动器79的操作进行控制的控制器提供指示气体压力的信号。控制器可以被配置成当气体压力在可接受的范围内时仅致动电子致动器79,并且因此致动气动致动器21。
138.在一个示例中,害虫防治装置20的操作可以如下。首先,第一阀63和第二阀64关闭并且气体从气体源25经由入口88提供至第二容积32。气体也从第二容积32经由放气孔33提供至第一容积31。第一容积31和第二容积32用加压气体填充并且达到大致相同的压力。在这种状态下,害虫防治装置20被设置成用于致动。当第一阀63打开时,气体从第一容积31经由管道28排出比其可以被从第二容积32经由放气孔33流出的气体置换的速度快。这降低了第二阀64的阀密封件26后面的压力并且导致阀密封件26由于压力不平衡而从第二阀64的阀座66上抬起,从而打开第二阀64。当阀密封件26从阀座66上抬起时,第二容积32不再与气动致动器21间隔开并且气体从第二容积32流动至致动器21,并且将活塞体36向下驱动穿过孔39而至位置36'。在优选的使用中,活塞体36被布置成撞击并杀死动物。
139.将会注意的是,由于气体入口88连接至第二容积32,因此在致动期间进入害虫防治装置20的气体将倾向于在至少部分致动期间将第二容积32中的气体维持在比第一容积31中的气体高的压力下。这是由于气体从气体源25穿过入口流动至第二容积32比气体从第二容积32穿过放气孔33流动至第一容积31快。这可以有助于第二阀64的打开以及气动致动器21的可靠且快速的致动。
140.在致动之后,致动器21的活塞体36通过弹簧35的作用下朝向其静止位置返回,并且第一阀63和第二阀64关闭,这允许第一容积31和第二容积32重新加压以及复位害虫防治装置20。入口88可以构造成允许气体以相对低的速率填充第二容积32。特别地,入口88的尺寸可以相对于放气孔33的尺寸被选择成使得气体填充第二体积32的速率与气体从第二体积32经由放气孔33流动到第一容积31中的速率相比不会太高。这可以确保第二容积32中的压力不会超过第一容积31中的压力过大的值,并且因此可以帮助在致动之后复位阀密封件26并且关闭第二阀64。
141.如图10所示,例如,害虫防治装置20可以包括电子设备,电子设备包括传感器42和传感器49、通信电路46、控制电路44、电池48和存储器47(示出在图10的示例中的信标害虫防治装置40中)。例如,一个或更多个压力传感器42可以设置在从气体源25至气动致动器21的气体的流动路径中。这可以在第一容积31或第二容积32中或者在从气体源25至入口88的气体供应管线45中。替代性地或附加地,一个或更多个压力传感器41可以设置在气体源25比如气瓶中、或者设置在气体源25的配件中。
142.压力传感器41、压力传感器42可以被用于感测害虫防治装置20的致动或正常运行。例如,压力从设定状态下的正常压力突然下降到较低值、然后又增加回到正常压力可以指示气动致动器21的致动。作为另一示例,压力下降后没有增加可以指示气体源断开连接或者流动路径中的一部分故障。作为又一示例,压力缓慢、逐渐降低可以指示流动路径中存在泄漏或者阀门关闭不当。
143.害虫防治装置20还可以包括加速度计43,当活塞体36被气体推动时,该加速度计可以从特征加速度检测气动致动器21的致动。可以提供比如温度和光或红外传感器之类的环境传感器49。
144.电子设备还可以包括控制电路44,其根据所提供的传感器类型周期性地轮询传感器41、传感器42、传感器43和传感器49以用于读数和/或在传感器41、传感器42、传感器43和传感器49检测到重要事件时接收读数。例如,可以周期性地轮询诸如温度传感器之类的环境传感器49以用于读数,而诸如加速度计43之类的事件传感器可以在高于显著性或灵敏度阈值的任何读数被检测到时报告该读数。
145.传感器41、传感器42、传感器43、传感器49可以与控制电路44有线或无线通信。在一个示例中,加速度计43、控制电路44、存储器47和通信电路46设置在电路板上并且电池48被保持在电路板中或电路板上。压力传感器41、压力传感器42可以与电路板分离并且经由通信电路46的天线或经由有线连接与控制电路44通信。例如,压力传感器41、压力传感器42可以使用近距离无线通讯技术(nfc)或远场无线电天线与通信电路46的对应天线进行通信。通信可以使用nfc、蓝牙或wifi协议。
146.害虫防治装置20可以收集并报告功能和环境信息,并将功能和环境信息报告给消费者、害虫防治官员或其他各方。该信息可以直接从害虫防治装置20收集或通过害虫防治
信息和监测系统报告。收集和报告的信息可以包括例如致动的计数、剩余致动的次数、检测到的错误或意外事件以及当前的气体源压力。
147.控制电路44可以配置成基于由传感器感测到的数据来控制害虫防治装置20的操作。例如,当感测到的气体压力低于阈值时,控制电路可以阻止气动致动器的致动。在一个示例中,阈值可以是对于人道杀害动物所需的估计的下限。在一个示例中,当压力在低于大约150kpa时,控制电路可以阻止致动。
148.害虫防治装置20或气体源25还可以包括用于向用户提供信息的一个或更多个指示器74、指示器75。指示器可以操作性地连接至一个或更多个传感器。例如,指示器74、指示器75可以操作性地连接至压力传感器41、压力传感器42以指示压力在预定范围之外。指示器74、指示器75可以指示压力何时不足以正确致动害虫防治装置20和/或高于害虫防治装置20或气体源25的上限。在一个示例中,指示器可以指示压力何时低于大约150kpa。在另一示例中,指示器可以指示压力何时高于大约450kpa。指示器可以操作性地连接至控制电路44、控制电路73以控制其操作。
149.指示器74、指示器75可以是适合于向用户指示信息的任何指示器。例如,指示器可以是视觉指示器比如灯或者是音频指示器比如蜂鸣器。
150.在图10中示出了示例害虫防治信息和监测系统100。系统100包括若干害虫防治装置20、移动计算装置50、云服务器54和/或专用的物理服务器55、用户计算装置56和广域网(wan)53。
151.在一个示例中,害虫防治装置20形成害虫防治装置网59。害虫防治装置网可以是允许在彼此范围内的任何害虫防治装置20之间进行双向通信的网状网。害虫防治装置20可以使用它们相应的通信电路经由蓝牙彼此通信。害虫控制装置20中的一者或更多者构造成信标40,信标传送关于网59中的害虫控防治装置20的信息。信标40可以是蓝牙信标,其向范围内的任何兼容装置广播其标识符。每个害虫防治装置20可以发送它自己的信息以及从其他害虫防治装置20接收的转播信息以形成网状网。这允许信息在整个害虫防治装置网59中传播直到信息到达信标40为止。信标40在其进入范围时然后可以向可兼容的移动计算装置50传输该信息。害虫防治装置20可以使用蓝牙或nfc通信与移动计算装置50通信。
152.害虫防治网可以包括多个短程单元和一个或更多个远程单元。短程单元可以使用诸如蓝牙之类的相对的短程通信技术来通信。远程单元(一个或多个)可以使用诸如无线电通信或有线通信之类的相对的远程通信技术来通信。远程单元(一个或多个)可以与互联网具有例如经由移动电话网络或有线通信网络进行的直接或间接的连接。这可以允许在不需要用户将移动计算装置带到远程单元(一个或多个)附近的情况下收集害虫防治装置信息。在一个示例中,一个或更多个信标40可以是远程单元而其他害虫防治装置可以是短程单元。
153.在一个示例中,可以提供多个信标40。在该示例中,信标40(一个或多个)可以位于相对可访问的位置,而其他害虫防治装置20不需要是可访问的。
154.还可以使用害虫防治装置网59的替代布置。例如,网59可以构造成比如在具有作为集线器或根节点的信标40的星形或树形网中。任何数量的害虫防治装置20可以构造成信标40,例如所有的害虫防治装置20可以是信标40以使得害虫防治装置信息能够从网59的任何节点收集。
155.移动计算装置50可以是具有无线通信电路52的移动电话或平板电脑。在一个示例中,移动计算装置50是支持蓝牙的移动电话。移动计算装置50可能已经在其上安装了害虫防治应用程序51。害虫防治应用程序51可以在建立通信时从信标40收集害虫防治装置信息。移动计算装置还可以连接至广域网53比如互联网以传输收集到的害虫防治信息。该连接可以是例如经由无线通信链路到wifi接入点或蜂窝通信网络,或者经由有线通信链路进行。
156.害虫防治信息然后可以被传送到包括云服务器54和/或专用的物理服务器55的后端系统60。服务器54、服务器55存储收集到的害虫防治信息。它们还可以使得可以被具有通信电路52的用户计算装置56访问。用户计算装置56可以具有安装在其上的害虫防治应用程序57,害虫防治应用程序可以与后端系统60通信以收集害虫防治信息。替代性地,用户计算装置56可以在不使用害虫防治应用程序57的情况下使用网络浏览器访问害虫防治信息。用户计算装置56可以是例如移动电话、平板计算机、膝上型计算机或台式计算机。
157.所描述的致动阀可以对小的力具有改进的灵敏度。这可以使它们特别适合以小型害虫动物、比如小鼠和大鼠为目标。
158.所描述的害虫防治装置可以允许快速致动和/或减少致动期间所产生的噪音量。这可能会导致更好的致死率/捕获率。
159.所描述的害虫防治装置可以确保当该装置被致动以提高致死率或捕获率时正确地定位害虫动物。
160.害虫防治装置可以由相对大的、低容积的气体源提供动力,这可以减少浪费和/或费用和/或不便。
161.害虫防治装置可以感测操作和/或其他信息以改进对害虫防治装置的监测。
162.虽然已经通过对本发明的各实施方式的描述来说明本发明并且虽然已经详细描述了各实施方式,但是申请人的意图不是将所附权利要求的范围限制或以任何方式限制为这样的细节。本领域的技术人员将容易明白另外的优点和改型。因此,本发明在其更广泛的方面不限于具体细节、代表性设备和方法以及所示出和所描述的说明性示例。因此,在不脱离申请人的总体发明构思的精神或范围的情况下,可以脱离这些细节。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

