1.本发明涉及自动化设备技术领域,特别涉及一种可自动完成套袋操作的幼果套袋装置及套袋方法。
背景技术:
2.在果树的种植过程中,为防止水果在生长过程中受到鸟类的侵袭、病虫的危害以及风雨阳光的损伤,需要对幼果进行套袋处理。对幼果进行套袋处理后,还能有效隔离环境污染对水果的侵蚀,防止水果在生长过中被树枝刮伤。同时,套袋后所产生的局部温室效应,使水果的生长环境能够始终保持适当的湿度、温度,提高水果的甜度,改善水果的光泽,增加水果的产量,并缩短其成长期。在套袋处理后,由于生长的过程中不需施用农药,使水果具有高品质且无公害,能够达到国际标准,保证水果的质量。因此,在果树种植过程中套袋操作成为重要的一环,对水果的种植起到重要的作用。
3.由于果林环境错综复杂、果树枝桠参差密布,所以一直以来果农在给水果套袋时都主要采用传统手工套袋的操作方式;采用手工套袋费时费力、效率低下,套袋质量好坏不一。为了提高套袋效率,保证套袋质量,减轻人工套袋的劳动强度,对套袋操作的自动化、机械化成为重要的发展趋势和研究方向。
技术实现要素:
4.本发明针对传统套袋操作存在的问题,提供一种幼果套袋装置及套袋方法,能够真正实现对幼果套袋的自动化操作和控制,提高套袋的效率和质量,降低套袋操作的劳动强度。
5.为解决上述技术问题,本发明采用的技术方案如下:
6.幼果套袋装置,包括:
7.储袋机构,所述储袋机构包括用于存放纸袋的储袋盒,所述纸袋层叠设置在储袋盒内,所述纸袋袋口朝储袋盒的出袋口设置;
8.取袋机构,所述取袋机构可运动到储袋盒位置,对位于储袋盒出袋口处一纸袋的一侧施加作用力,并将纸袋从储袋盒中取出,送至张袋机构所在位置;
9.张袋机构,所述张袋机构设置在与取袋机构相对的一侧,所述张袋机构可在水平方向上动作,并对取袋机构取出的纸袋另一侧施加作用力,使纸袋袋口张开;
10.收拢机构,所述收拢机构设置在张袋机构上方,所述收拢机构上设置有供纸袋袋口伸入的开孔,当纸袋袋口位于开孔内时,所述收拢机构动作将张开的纸袋袋口收拢呈条状;
11.缠绕机构,所述缠绕机构设置在收拢机构下方,所述缠绕机构用于将具有一定韧性的捆扎线缠绕到收拢呈条状的纸袋袋口上。
12.上述技术方案中,进一步地,所述取袋机构包括第一升降组件和第一伸缩组件,所述第一伸缩组件设置在第一升降组件上,所述第一升降组件可沿竖直方向上下运动;
13.所述第一伸缩组件与储袋盒的出袋口相对设置,可在水平方向上朝储袋盒的出袋口方向做伸缩运动,所述第一伸缩组件的自由端上设置有第一吸附组件,所述第一吸附组件运动到储袋盒的出袋口位置时,对位于出袋口处的纸袋一侧施加吸附作用力;优选所述第一升降组件包括多个竖直设置的导柱、活动框架和第一升降驱动机构,所述活动框架与导柱之间滑动配合连接,所述第一升降驱动机构驱动所述活动框架沿导柱上下运动,所述第一伸缩组件呈水平设置在活动框架上;优选所述第一吸附组件为设置在第一伸缩组件自由端上的第一磁吸,所述第一磁吸与设置在纸袋一侧的金属片吸合。
14.上述技术方案中,进一步地,所述张袋机构包括第二伸缩组件;
15.所述第二伸缩组件呈水平设置,所述第二伸缩组件的自由端与第一伸缩组件的自由端相对设置,可朝第一伸缩组件在水平方向上做伸缩运动,所述第二伸缩组件的自由端上设置有第二吸附组件,所述第二吸附组件运动到纸袋所在位置时,对取袋机构上纸袋的另一侧施加吸附作用力;优选所述第二吸附组件为设置在第二伸缩组件自由端上的第二磁吸,所述第二磁吸与设置在纸袋另一侧的金属片吸合。
16.上述技术方案中,进一步地,所述收拢机构包括收拢组件、第一转动驱动机构和第二升降驱动机构;
17.所述收拢组件包括呈水平设置的第一转盘和第二转盘,所述第一转盘和第二转盘为环状结构,在收拢组件上形成供纸袋袋口伸入的开孔;
18.所述第一转盘与第二转盘之间设置有多个叶片,所述叶片沿第一转盘与第二转盘的圆周方向呈环形布置,所述叶片分别与第一转盘和第二转盘之间滑动配合连接,所述第一转盘与第二转盘之间发生相对转动时,所述叶片分别朝开孔中心滑动将开孔封闭或从开孔中心向外侧滑动使开孔开启;
19.所述第一转动驱动机构驱动第一转盘与第二转盘之间相对转动;
20.所述第二升降驱动机构驱动所述收拢组件沿竖直方向做升降运动。
21.上述技术方案中,进一步地,所述第一转盘相对第二转盘固定设置,所述第一转动驱动机构驱动第二转盘转动;
22.所述第二转盘上沿其周向设置有多条第一导槽,所述叶片上与第二转盘对应的一侧上分别设置有滑块,所述滑块分别配合设置在第一导槽内,与第一导槽之间滑动配合,所述叶片的另一侧上分别设置有第二导槽,所述第一转盘与叶片对应的一侧沿其周向设置有多个滑动头,所述滑动头分别配合设置在第二导槽内,与第二导槽之间滑动配合;
23.所述叶片上的第二导槽与该叶片所对应的第一导槽之间相互近似垂直设置;优选相邻设置的两个叶片的侧边之间相互紧贴且滑动配合设置。
24.上述技术方案中,进一步地,所述第二升降驱动机构包括多个沿竖直方向设置的导杆和第二升降组件;
25.所述收拢组件与导杆之间滑动配合连接,所述第二升降组件驱动收拢组件沿导杆上下运动;优选所述第二升降组件包括第二升降电机和沿竖直方向设置的第二升降螺杆,所述第二升降电机驱动第二升降螺杆转动,所述第二升降螺杆与收拢组件之间螺纹连接。
26.上述技术方案中,进一步地,所述缠绕机构包括第一推送组件、缠绕组件、第一夹丝机构和第二夹丝机构;
27.所述第一推送组件的活动端设置有连接件,所述第一推送组件推动连接件沿水平
方向运动,所述缠绕组件和第二夹丝机构分别设置在连接件上,所述缠绕组件设置在第二夹丝机构上方,所述第二夹丝机构与连接件之间滑动配合,所述第二夹丝机构与缠绕组件之间设置有第三升降组件;
28.所述缠绕组件包括壳体、缠绕轮和第二转动驱动机构,所述缠绕轮设置在壳体内,与壳体之间转动配合,使缠绕轮可沿其垂直轴线在其所在平面内做自转运动,所述缠绕轮上设置有供收拢呈条状的纸袋袋口伸入的定位豁口,所述定位豁口从缠绕轮外缘朝缠绕轮中心设置,所述缠绕轮上位于定位豁口外侧设置有定位孔;
29.所述捆扎线一端穿过第二夹丝机构,所述第二夹丝机构对捆扎线一端夹紧固定,另一端穿设在定位孔内,所述第一夹丝机构设置在缠绕轮的定位孔处,所述第一夹丝机构对捆扎线另一端夹紧固定;
30.所述第二转动驱动机构驱动缠绕轮转动的同时,驱动所述第三升降组件动作,此时所述第三升降组件驱动第二夹丝机构在连接件上沿竖直方向做升降运动。
31.上述技术方案中,进一步地,所述缠绕机构包括第一推送组件、缠绕组件和第二夹丝机构;
32.所述第一推送组件的活动端设置有连接件,所述第一推送组件推动所述连接件沿水平方向运动,所述缠绕组件和第二夹丝机构分别设置在连接件上,所述缠绕组件设置在第二夹丝机构下方,所述缠绕组件与连接件之间滑动配合,所述第二夹丝机构与缠绕组件之间设置有第三升降组件;
33.所述缠绕组件包括壳体、缠绕轮和第二转动驱动机构,所述缠绕轮设置在壳体内,与壳体之间转动配合,使缠绕轮可沿其垂直轴线在其所在平面内做自转运动,所述缠绕轮上设置有供收拢呈条状的纸袋袋口伸入的定位豁口,所述定位豁口从缠绕轮外缘朝缠绕轮中心设置,所述缠绕轮上位于定位豁口外侧设置有定位孔;
34.所述捆扎线穿设在定位孔内,捆扎线一端伸入到第二夹丝机构,所述第二夹丝机构对捆扎线夹紧固定;
35.所述第二转动驱动机构驱动缠绕轮转动的同时,驱动所述第三升降组件动作,此时所述第三升降组件驱动缠绕组件在连接件上沿竖直方向做升降运动。
36.上述技术方案中,进一步地,所述幼果套袋装置还包括:
37.储丝机构,所述储丝机构包括绕丝盘,所述捆扎线缠绕在绕丝盘上;
38.送丝机构,所述送丝机构用于将绕丝盘上的捆扎线送至缠绕机构;
39.剪丝机构,所述剪丝机构设置于送丝机构与缠绕机构之间,用于将捆扎线剪断。
40.上述技术方案中,进一步地,所述送丝机构设置在绕丝盘上方,包括水平设置的送丝组件和第五转动驱动机构;
41.所述送丝组件包括相对设置的导丝辊和送丝轮,所述第五转动驱动机构驱动送丝轮转动时,所述送丝轮可带动导丝辊转动,所述导丝辊外圆周面上沿其周向设置有与捆扎线配合的导丝槽,所述捆扎线设置在导丝槽内。
42.上述技术方案中,进一步地,所述剪丝机构设置在送丝机构上方,包括水平设置的剪丝组件和第六转动驱动机构;
43.所述剪丝组件包括固定件和设置在固定件上的转动盘,所述转动盘与固定件之间转动连接,所述转动盘和固定件上分别设置有可供捆扎线穿过的过线孔,所述转动盘上在
转动盘与固定件之间设置有切刀,所述切刀的刃口设置在与转动盘上的过线孔相对应的位置处;
44.所述第六转动驱动机构驱动转动盘转动。
45.本发明还提供一种基于上述幼果套袋装置的套袋方法,包括以下步骤:
46.s10、控制取袋机构运动到储袋盒上方;
47.s20、控制取袋机构动作并伸至储袋盒的出袋口位置,对位于储袋盒出袋口处一纸袋的一侧施加作用力,与纸袋之间形成连接;
48.s30、控制取袋机构朝张袋机构方向运动,将一纸袋从储袋盒中抽出,送至与张袋机构相对的位置处,并使纸袋位于收拢机构下方靠近开孔中心的位置;
49.s40、控制张袋机构动作并运动到纸袋位置,对取袋机构取出的纸袋另一侧施加作用力,将纸袋袋口张开;
50.s50、控制收拢机构沿竖直方向朝纸袋方向运动,使纸袋袋口进入到开孔内;
51.s60、将幼果套袋装置伸入到幼果下方,并将幼果套入到纸袋内;
52.s70、控制收拢机构动作,将纸袋袋口收拢呈条状;然后控制收拢机构动作使其与纸袋袋口分离;
53.s80、控制收拢机构沿竖直方向朝远离纸袋方向运动;
54.s90、控制缠绕机构动作,将具有一定韧性的捆扎线缠绕到纸袋袋口上;
55.优选所述步骤s90中,所述缠绕机构的缠绕操作步骤包括:
56.s91、控制第一推送组件动作,将缠绕组件推送到纸袋袋口位置,使纸袋袋口卡入到缠绕轮的定位豁口内;
57.s92、控制第二夹丝机构、第一夹丝机构动作,对捆扎线一端或两端夹紧;
58.s93、控制缠绕轮转动,将捆扎线缠绕到纸袋袋口上。
59.上述技术方案中,进一步地,还包括有自动送丝的步骤,将储丝机构上的捆扎线自动送至缠绕机构,包括以下步骤:
60.控制送丝机构动作,使捆扎线朝缠绕机构方向运动;
61.控制剪丝机构动作,将捆扎线在剪丝机构位置剪断。
62.本发明所具有的有益效果:
63.1)该装置能够实现自动取袋、张袋以及对袋口进行自动收拢并进行捆扎的操作,实现了套袋操作的全过程自动化控制,能够有效提高套袋操作的自动化水平,相比于人工套袋方式,提高了套袋效率,降低了劳动强度。
64.2)该装置整体结构设计巧妙,各动作执行机构结构设置合理,通过对各动作执行机构之间的配合设置,实现了对复杂套袋动作过程的逐步分解和实现,整个套袋动作执行过程的运行和控制稳定可靠,保证了装置使用过程中的可靠性,能够很好地保证套袋的质量。
附图说明
65.为了更清楚地说明本发明实施例的技术方案,下面将对实施例中的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获
得其他相关的附图。
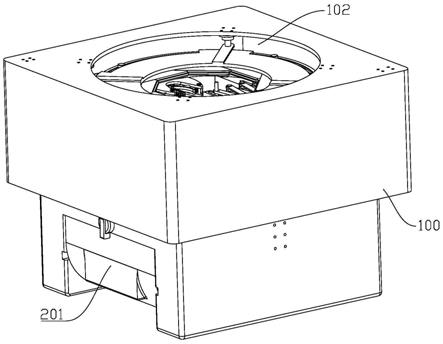
66.图1为本发明实施例中装置整体结构示意图。
67.图2为本发明实施例中装置内部结构布置示意图;其中,图2a)为打开部分盒体后第一视角的装置结构示意图,图2b)为打开全部盒体后第二视角的装置结构示意图。
68.图3为本发明实施例中装置的储袋机构结构示意图;其中,图3a)为储袋机构立体结构示意图;图3b)为储袋机构剖视图。
69.图4为本发明实施例中装置的取袋机构结构示意图。
70.图5为本发明实施例中装置的张袋机构结构示意图。
71.图6为本发明实施例中装置的收拢机构结构示意图。
72.图7为本发明实施例中装置的收拢机构中收拢组件结构示意图;其中,图7a)为第一转盘结构示意图,图7b)为第二转盘结构示意图,图7c)为叶片结构示意图,图7d)为叶片在第二转盘上的布置结构示意图,图7e)为第一导槽与第二导槽布置关系示意图,图7f)为收拢组件中叶片收拢状态结构示意图。
73.图8为本发明实施例中装置的缠绕机构一种实施方式结构示意图。
74.图9为本发明实施例中装置的缠绕机构内部结构示意图;其中,图9a)为缠绕轮传动结构示意图;图9b)为壳体内部结构示意图。
75.图10为本发明实施例中装置的缠绕机构中第一夹丝机构结构示意图;其中,图10a)为第一夹丝机构立体结构示意图,图10b)为第一夹丝机构俯视图,图10c)为图10b)中b
‑
b向剖视图。
76.图11为本发明实施例中装置的缠绕机构中第二夹丝机构结构示意图。
77.图12为本发明实施例中装置缠绕机构另一实施方式结构示意图。
78.图13为本发明实施例中装置缠绕机构另一实施方式中第一推送组件将缠绕组件推出状态结构示意图。
79.图14为本发明实施例中装置的储丝机构结构示意图。
80.图15为本发明实施例中装置的送丝机构结构示意图。
81.图16为本发明实施例中装置的剪丝机构结构示意图;其中,图16a)为剪丝机构立体结构示意图;图16b)为固定件结构示意图;图16c)为切刀在转动盘上设置结构示意图。
82.图中:
83.100、盒体;101、固定框板,102、开口;
84.200、储袋机构,201、储袋盒,2011、出袋口,2012、缺口,202、推板,203、弹簧组件;
85.300、取袋机构,301、导柱,302、活动框架,303、第一升降电机,304、第一升降螺杆,305、第一伸缩组件,3051、第一伸缩组件自由端,306、第一磁吸;
86.400、张袋机构,401、第二伸缩组件,4011、第二伸缩组件自由端,402、第二磁吸;
87.500、收拢机构,501、收拢组件,5011、第一转盘,5012、第二转盘,5013、开孔,5014、叶片,5015、第一导槽,5016、滑块,5017、第二导槽,5018、滑动头,502、导杆,503、第二升降电机,504、第二升降螺杆,505、第一转动电机,506、齿轮皮带,507、弧形导槽,508、限位导杆;
88.600、缠绕机构,601、第一推送组件,602、缠绕组件,6021、壳体,6022、缠绕轮,6023、定位豁口,6024、定位孔,6025、环形凹槽,6026、滚珠,603、第一夹丝机构,6031、上夹
丝件,6032、下夹丝件,6033、夹紧件,6034、锥形槽,6035、第一通孔,6036、弹性夹片,6037、第一夹紧驱动电机,604、第二夹丝机构,6041、夹具本体,6042、夹持件,6043、第二通孔,6044、第二夹紧驱动电机,605、连接件,606、第二转动电机,607、第一传动齿轮,608、第二传动齿轮,609、第三传动杆,610、第三传动齿轮;
89.700、储丝机构,701、绕丝盘;
90.800、送丝机构,801、导丝辊,802、送丝轮,803、导丝槽,804、第五转动电机;
91.900、剪丝机构,901、固定件,902、转动盘,903、过线孔,904、切刀,905、第六转动电机,906、传动齿轮。
具体实施方式
92.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。
93.参照图1和2,本发明实施例中的幼果套袋装置,包括:
94.储袋机构200,所述储袋机构包括用于存放纸袋的储袋盒,所述纸袋层叠设置在储袋盒内,所述纸袋袋口朝储袋盒的出袋口设置;
95.取袋机构300,所述取袋机构可运动到储袋盒位置,对位于储袋盒出袋口处一纸袋的一侧施加作用力,并将纸袋从储袋盒中取出,送至张袋机构所在位置;
96.张袋机构400,所述张袋机构设置在与取袋机构相对的一侧,所述张袋机构可在水平方向上动作,并对取袋机构取出的纸袋另一侧施加作用力,使纸袋袋口张开;
97.收拢机构500,所述收拢机构设置在张袋机构上方,所述收拢机构上设置有供纸袋袋口伸入的开孔,当纸袋袋口位于开孔内时,所述收拢机构动作将张开的纸袋袋口收拢呈条状;
98.缠绕机构600,所述缠绕机构设置在收拢机构下方,所述缠绕机构用于将具有一定韧性的捆扎线缠绕到收拢呈条状的纸袋袋口上。
99.通过设置储袋机构、取袋机构、张袋机构、收拢机构、缠绕机构,能够实现自动化套袋过程中的取袋、袋口张开、袋口收拢以及对袋口进行捆扎的操作。
100.作为本实施例进一步优选的实施方式,该幼果套袋装置还包括:
101.储丝机构700,所述储丝机构包括绕丝盘,所述捆扎线缠绕在绕丝盘上;
102.送丝机构800,所述送丝机构用于将绕丝盘上的捆扎线送至缠绕机构;
103.剪丝机构900,所述剪丝机构设置于送丝机构与缠绕机构之间,用于将捆扎线剪断。
104.通过设置储丝机构、送丝机构、剪丝机构,实现在对袋口进行捆扎时自动供应捆扎线的动作,进一步实现套袋过程的全自动操作。
105.下面结合本发明幼果套袋装置一种可行实施例的结构图,对装置的具体结构及装置中各功能、动作执行机构的结构详细说明如下:
106.如图1和图2所示,本实施例中的幼果套袋装置包括有盒体100,储袋机构200、取袋机构300、张袋机构400、收拢机构500、缠绕机构600、储丝机构700、送丝机构800、剪丝机构900等均设置在该盒体100内,盒体100上端设置有供幼果进入盒体内部的开口102,以盒体
作为安装的载体,与盒体之间连接以实现各自的功能。
107.储袋机构200作为存放纸袋以及供应纸袋的机构,如图3所示,包括用于存放纸袋的储袋盒201,纸袋层叠设置在储袋盒201内,纸袋袋口朝储袋盒的出袋口2011设置。储袋盒201设置在盒体100的底部。该储袋盒201在结构上为了方便纸袋的存放及对纸袋的取出操作,储袋盒201宽度与纸袋宽度一致,储袋盒201整体呈l形结构,其出袋口2011位于储袋盒201一端并朝上方设置,储袋盒201整体形成一端开口的封闭腔体结构,在开口2011一端与内部腔体之间采用圆弧形结构进行过渡,方便纸袋在储袋盒内的放置,以及将纸袋从储袋盒中取出。
108.在储袋盒201的出袋口2011一端靠内侧设置有缺口2012,纸袋放置到储袋盒内时,使纸袋上设置的金属片从缺口2012处露出,方便取袋机构将纸袋从储袋盒内取出。
109.本实施例中储袋盒201与盒体100之间设置抽屉导轨结构,实现储袋盒与盒体之间的抽拉活动式连接,方便将储袋盒从盒体中抽出,以便于装入新的纸袋。
110.在储袋盒201内设置有推袋组件,该推袋组件包括设置在储袋盒内的推板202和设置在推板与储袋盒封闭端之间的弹簧组件203,这里推板202与储袋盒201之间滑动配合连接,使其可在储袋盒内在弹簧组件的作用力下朝出袋口方向运动。推板202在储袋盒201内倾斜一定角度设置;这里结合储袋盒的结构设置以及纸袋在储袋盒内的设置方式,当一摞纸袋放置到储袋盒内时,层叠设置的纸袋在呈l形设置到储袋盒内后,由于其具有一定的厚度,其位于推板的一侧呈倾斜设置,而储袋盒内的纸袋位于出袋口的一端则正好伸出到储袋盒的出袋口处,从而能够方便从储袋盒内取纸的操作。这里推板202与储袋盒201之间滑动配合的实现,可采用现有常规的滑动配合连接结构形式。
111.本实施例的幼果套袋装置中采用磁吸的方式实现从储袋盒中取纸袋的自动化操作,所采用的取袋机构包括第一升降组件和第一伸缩组件305;第一升降组件与第一伸缩组件305之间配合实现从储袋盒中取出纸袋,并将纸袋送至下一操作动作位置。
112.具体地,如图4所示,第一升降组件包括竖直设置在盒体内的多根导柱301、活动框架302和第一升降驱动机构,所述活动框架302与导柱301之间滑动配合连接,所述第一升降驱动机构驱动所述活动框架302沿导柱301上下运动。这里活动框架302采用l形结构件。
113.第一升降驱动机构设置在活动框架302一侧,包括第一升降电机303和与第一升降电机输出轴连接的第一升降螺杆304,活动框架302与第一升降螺杆304之间螺纹连接,这样当第一升降电机驱动第一升降螺杆转动时,即可带动活动框架沿导柱上下运动。
114.第一伸缩组件305呈水平设置在活动框架302上,第一伸缩组件305设置在与储袋盒出袋口2011相对的一侧,这样就需要第一伸缩组件能够伸到储袋盒出袋口位置以完成取袋的操作。第一伸缩组件305的自由端3051可朝储袋盒出袋口2011方向在水平方向上做伸缩运动,在第一伸缩组件的自由端3051设置有第一磁吸306,所述第一磁吸306与设置在纸袋一侧的金属片吸合,将纸袋从储袋盒201中取出。
115.具体地,本实施例中作为一种可选的实施方式,这里第一伸缩组件305包括第一剪叉支架,第一剪叉支架在一端与活动框架302连接,其中第一剪叉支架与活动框架连接的一端包括第一固定节点和第一活动节点,其中,第一剪叉支架通过第一固定节点与活动框架之间铰链转动连接,通过第一活动节点与活动框架之间滑动配合连接,在该第一固定节点处设置驱动固定节点转动的电机,通过电机驱动该第一固定节点转动,或在活动框架与第
一剪叉支架的自由端之间设置第一电动推杆,通过第一电动推杆对第一剪叉支架的自由端运动,即可实现第一剪叉支架的伸缩动作,将第一剪叉支架的自由端送至储袋盒的出袋口位置。
116.本实施例中的取袋机构在进行取袋操作的动作过程为:
117.控制第一升降驱动机构动作,驱动活动框架向下运动,此时第一伸缩组件随活动框架运动到储袋盒上方位置;控制第一伸缩组件动作,使第一伸缩组件的自由端朝储袋盒出袋口方向伸出,并伸到储袋盒出袋口位置,此时第一伸缩组件活动端上的第一磁吸与位于储袋盒缺口位置的纸袋上的金属片吸合,然后控制第一升降驱动机构动作,驱动活动框架向上运动,在磁力的作用下,即可将一个纸袋从储袋盒内取出。
118.在取袋机构将纸袋从储袋盒中取出后,为了方便后续的套袋操作,需要将纸袋袋口张开,这里通过设置张袋机构实现纸袋袋口的张开操作。
119.具体地,如图5,本实施例中的张袋机构400包括设置在收拢机构下方的第二伸缩组件401;第二伸缩组件401呈水平设置,第二伸缩组件401设置在与第一伸缩组件305相对的一侧,使第二伸缩组件的自由端4011与第一伸缩组件的自由端3051相对设置,第二伸缩组件的自由端可朝第一伸缩组件的自由端在水平方向上做伸缩运动,第二伸缩组件的自由端4011上设置有第二磁吸402,第二磁吸402与设置在纸袋另一侧的金属片吸合,将纸袋袋口张开。
120.本实施例中作为一种可选的实施方式,这里第二伸缩组件401包括第二剪叉支架,第二剪叉支架一端与盒体内固定设置的固定框板101之间连接,其中第二剪叉支架与固定框板连接的一端包括第二固定节点和第二活动节点,第二剪叉支架通过第二固定节点与固定框板之间转动连接,通过第二活动节点与固定框板之间活动配合连接,在该第二固定节点处设置驱动该第二固定节点转动的电机,通过该电机驱动该第二固定节点转动,即可实现对该第二剪叉支架的伸缩动作。
121.本实施例中张袋机构在实现袋口张开的动作过程为:
122.在取袋机构将纸袋从储袋盒中取出后,控制其第一伸缩组件运动到与第二伸缩组件相对的位置处,同时控制第一伸缩组件做伸缩运动,使纸袋位于靠近收拢机构开孔的下方位置,然后控制第二伸缩组件的自由端朝纸袋运动,使第二伸缩组件自由端上的第二磁吸与纸袋另一侧的金属片之间吸合,控制第二伸缩组件朝远离纸袋方向运动,此时纸袋两侧在磁力的作用下,使纸袋袋口张开;或者控制第一伸缩组件与第二伸缩组件同时朝远离纸袋的方向运动,同样能够实现将纸袋袋口的张开操作。
123.在纸袋袋口张开后,将该幼果套袋装置送至待套袋的幼果位置,将幼果送入到张开的纸袋内,此时就需要进行对纸袋的封口操作。这里对纸袋的封口操作通过收拢机构和缠绕机构完成对纸袋的收口和捆扎操作。
124.如图6,幼果套袋装置的收拢机构500包括收拢组件501、第一转动驱动机构和第二升降驱动机构;收拢组件501包括水平设置的第一转盘5011和第二转盘5012,第一转盘5011和第二转盘5012为环状结构,在收拢组件上形成供纸袋袋口伸入的开孔5013;第一转盘5011与第二转盘5012之间设置有多个叶片5014,叶片5014沿第一转盘与第二转盘的圆周方向呈环形布置,叶片5014分别与第一转盘5011和第二转盘5012滑动配合连接,第一转盘与第二转盘之间发生相对转动时,叶片5014分别朝开孔中心滑动将开孔5013封闭,将位于开
孔内的纸袋袋口收拢,或从开孔中心向外侧滑动使开孔开启,使叶片与纸袋之间分离。
125.这里要实现对纸袋的收口操作,需先将收拢组件501套到纸袋袋口上,为了实现这一目的,该装置中创造性地采用了通过控制收拢组件运动的方式来实现。具体地,在将纸袋袋口张开后,此时纸袋正好位于收拢组件上开孔的下方位置,通过第二升降驱动机构驱动收拢组件沿竖直方向向下运动,将纸袋袋口套入到收拢组件的开孔内,此时控制收拢组件动作即可实现对纸袋袋口的收拢操作。
126.为实现收拢组件的升降运动以及收拢组件内部的收拢动作,本实施例中对收拢机构整体结构以及收拢机构与盒体之间的连接方式进行了设计,以实现上述一系列复杂的动作,具体地:
127.这里第二升降驱动机构包括设置在收拢组件外侧的多个导杆502和第二升降组件;这里导杆502一端与盒体100之间固定连接,导杆502竖直设置并伸向收拢组件,收拢组件中位于上方的第一转盘5011与导杆502之间滑动配合连接,第二升降组件驱动收拢组件沿导杆上下运动。
128.作为一种可选的实施方式,这里的第二升降组件包括设置在盒体上的第二升降电机503和在一端与盒体之间转动连接的第二升降螺杆504,第二升降螺杆504竖直设置并伸向收拢组件501,与收拢组件501的第一转盘5011之间螺纹连接,第二升降电机503驱动第二升降螺杆504转动,第二升降螺杆504转动时驱动收拢组件完成竖直方向上的升降运动。
129.在将收拢组件套到纸袋袋口上后,即可控制收拢组件完成纸袋袋口的收拢操作。具体地,如图7所示,本实施例中收拢组件501的第一转盘5011通过导杆502、第二升降螺杆504与盒体100上部之间连接,以限制第一转盘的转动;第二转盘5012与第一转动驱动机构连接,第一转动驱动机构驱动第二转盘5012转动;叶片5014设置在第二转盘5012上,并沿第二转盘5012周向呈环形布置;第二转盘5012上沿其周向设置有多条第一导槽5015,叶片5014上与第二转盘对应的一侧上分别设置有滑块5016,滑块5016分别对应配合设置在第一导槽5015内,与第一导槽5015之间滑动配合,叶片5014的另一侧上分别设置有第二导槽5017,第一转盘5011上与叶片对应的一侧沿其周向设置有多个滑动头5018,滑动头5018分别配合设置在第二导槽5017内,与第二导槽5017之间滑动配合;叶片5014上的第二导槽5017与该叶片所对应的第一导槽5015相互呈近似垂直设置。此时,当第一转动驱动机构驱动第二转盘转动时,第二转盘与第一转盘之间相对运动,通过配合设置在第一导槽与滑块、第二导槽与滑动头,驱动叶片同时朝开孔中心运动,在叶片的作用下将纸袋袋口收拢。
130.这里第一转动驱动机构包括设置在盒体100上的第一转动电机505,第一转动电机505的输出轴与第二转盘5012之间通过齿轮皮带506连接,实现对第二转盘的转动驱动。
131.作为对收拢组件结构的进一步改进,保证叶片在动作过程中的稳定性,收拢组件中相邻设置的两个叶片5014的侧边之间相互紧贴且滑动配合设置,即在叶片同时动作时,一个叶片的侧边可沿另一相邻的叶片的侧片滑动。叶片之间的滑动配合结构可采用现有的滑槽与滑轨配合的结构。
132.作为实现第一转盘与第二转盘之间相对转动运动的一种实施方式,这里可在第一转盘5011与第二转盘5012之间设置转动导向结构,该转动导向结构用于限制第一转盘与第二转盘之间的运动,使第一转盘与第二转盘之间仅能绕其垂直轴线发生相对转动。参照如图7,这里的转动导向机构可采用设置在第一转盘上的多个弧形导槽507和设置在第二转盘
上的多个限位导杆508,限位导杆508与弧形导槽507之间滑动配合,限制第二转盘与第一转盘之间的转动运动,同时限位导杆通过其端部设置的限位头结构限制第二转盘与第一转盘之间在竖直方向的运动。
133.在完成纸袋袋口的收拢操作后,即可对收拢后的袋口进行缠绕操作,为了方便缠绕操作,为缠绕操作提供足够的空间,可控制收拢组件上升;这里缠绕操作采用缠绕机构来完成。
134.在一实施例中,如图8和9所示,本实施例中的缠绕机构600包括第一推送组件601、缠绕组件602、第一夹丝机构603和第二夹丝机构604。
135.如图8和9所示,第一推送组件601的活动端设置有连接件605,第一推送组件推动连接件沿水平方向运动,所述缠绕组件602和第二夹丝机构604分别设置在连接件605上,缠绕组件602设置在第二夹丝机构604上方,所述第二夹丝机构604与连接件605之间滑动配合设置,所述第二夹丝机构604与缠绕组件602之间设置有第三升降组件。具体地,第一推送组件601可采用电动推杆,通过控制电动推杆推动连接件运动,可实现缠绕组件与第二夹丝机构在水平方向上的运动。在缠绕操作时,通过第一推送组件将缠绕组件推送到待捆扎的袋口位置,实现对袋口的捆扎操作。
136.缠绕组件作为将捆扎线缠绕到袋口的操作机构,本实施例中的缠绕组件602包括壳体6021、缠绕轮6022和第二转动驱动机构,缠绕轮6022设置在壳体6021内,与壳体6021之间转动配合,使缠绕轮可沿其垂直轴线在其所在平面内做自转运动,缠绕轮6022上设置有供收拢呈条状的纸袋袋口伸入的定位豁口6023,定位豁口6023从缠绕轮外缘朝缠绕轮6022中心设置,缠绕轮6022上位于定位豁口6023外侧设置有定位孔6024。为实现缠绕轮在壳体上的转动连接,在壳体6021内上下两侧内壁上分别设置有环形凹槽6025,上下两侧内壁上环形凹槽6025的截面呈弧形,在缠绕轮6022上设置在多个滚珠6026,滚珠6026在缠绕轮6022上呈周向布置,滚珠6026在缠绕轮上可沿其球心自由转动。缠绕轮设置到壳体内时,滚珠6026正好配合设置于壳体内上下两侧内壁上的环形凹槽6025内,使滚珠只能够在环形凹槽内运动,实现缠绕轮在壳体内沿其垂直轴线在其所在平面内的自转运动。
137.缠绕组件602的壳体6021一端呈叉形开放式结构,与缠绕轮6022上的定位豁口6023相配合,此时,缠绕轮能够从叉形开放式结构位置露出,使纸袋袋口可经叉形结构进入到定位豁口内。定位豁口6023的根部位于靠近缠绕轮中心的位置,定位孔6024位于定位豁口根部的外侧。在缠绕操作时,收拢后的纸袋袋口卡入到定位豁口的根部位置,此时纸袋袋口大致位于缠绕轮的中心,缠绕轮转动时,位于定位孔内的捆扎线一端绕纸袋袋口转动,即可将捆扎线缠绕到纸袋袋口上,实现对纸袋袋口的捆扎。
138.缠绕组件在缠绕时,需要对捆扎线的两端进行固定,这里通过设置第一夹丝机构和第二夹丝机构实现对捆扎线两端的固定。具体地,捆扎线一端穿过第二夹丝机构604,第二夹丝机构604对捆扎线一端夹紧固定,另一端穿设在定位孔6024内,第一夹丝机构603设置在缠绕轮6022的定位孔6024处,第一夹丝机构603对捆扎线另一端夹紧固定。
139.如图10,本实施例中第一夹丝机构603包括第一夹丝组件和第一夹紧驱动机构,第一夹丝组件设置在定位孔6024内,包括设置在定位孔内的上夹丝件6031、下夹丝件6032和夹紧件6033,上夹丝件6031在上端与缠绕轮6022之间固定连接,上夹丝件6031另一端设置在下夹丝件6032内,与下夹丝件6032之间螺纹连接。下夹丝件6032内位于底部设置有锥形
槽6034,锥形槽6034在下夹丝件内呈倒锥体结构,下夹丝件6032上位于锥形槽6034底部设置有供捆扎线通过的第一通孔6035。夹紧件6033设置在锥形槽6034内,夹紧件6033呈空心的倒锥台结构,与锥形槽6034之间相配合;夹紧件6033包括多个呈周向布置的弹性夹片6036,弹性夹片6036一端固定连接,另一端为朝下夹丝件6032的第一通孔6035方向设置的自由端。上夹丝件与下夹丝件相对转动时,上夹丝件可推动夹紧件朝锥形槽内运动,通过锥形槽与夹紧件之间的配合,使弹性夹片的自由端向内部收紧,此时弹性夹片的自由端将穿设在第一夹丝组件内的捆扎线夹紧固定。
140.如图8,这里第一夹紧驱动机构包括设置在壳体6021上的第一夹紧驱动电机6037,在第一夹紧驱动电机6037的输出轴上设置齿轮,在下夹丝件6032下端端部设置齿形结构,第一夹紧驱动电机6037与下夹丝件6032之间通过齿轮啮合传动连接,通过第一夹紧驱动电机驱动下夹丝件的转动,下夹丝件在正向、反向转动过程中实现对捆扎线的夹紧和松开操作。
141.如图11,本实施例中第二夹丝机构包括夹具本体6041、夹持件6042和第二夹紧驱动机构,夹具本体6041一端与连接件605之间滑动配合连接,可沿连接件上下滑动;在夹具本体6041上设置有供捆扎线通过的第二通孔6043。在夹具本体6041上设置夹持件6042和第二夹紧驱动机构,通过驱动夹持件动作对穿设在第二通孔内的捆扎线进行夹紧。
142.作为一种可选的实施方式,本实施例中的夹持件6042设置于夹具本体6041上位于第二通孔6043一侧的位置,夹持件6042与夹具本体6041之间采用螺纹连接方式,第二夹紧驱动机构包括第二夹紧驱动电机6044,第二夹紧驱动电机6044的输出轴与夹持件6042一端活动连接,第二夹紧驱动电机6044驱动夹持件转动时,夹持件可朝靠近或远离第二通孔的方向上做水平运动,实现对第二通孔内捆扎线的夹紧与松开。这里第二夹紧驱动电机输出轴与夹持件之间的活动连接用于实现第二夹紧驱动电机对夹持件转动驱动的同时,使夹持件可沿输出轴轴向水平运动。针对该活动连接结构,采用现有的常规结构能够容易实现相应的功能,这里不对其结构做详细描述。
143.第二转动驱动机构用于驱动缠绕轮转动,其在驱动缠绕轮转动的同时,可驱动第三升降组件动作,此时第三升降组件驱动第二夹丝机构在连接件上朝缠绕组件方向做升降运动。缠绕机构在纸袋袋口缠绕捆扎线时,驱动第二夹丝机构在连接件上朝缠绕组件方向向上运动,可满足捆扎线在螺旋缠绕过程中不断缩短的需要,保证缠绕动作的完成。
144.作为一种可行的实施方式,本实施例中第二转动驱动机构包括设置在壳体上的第二转动电机606、设置在第二转动电机输出轴上的第一传动齿轮607和与壳体之间转动连接的第二传动齿轮608,所述第一传动齿轮607和第二传动齿轮608分别与缠绕轮6022之间啮合。
145.第三升降组件包括沿连接件轴线方向设置的第三传动杆609,所述第三传动杆609一端与壳体之间转动连接并伸入到壳体内,第三传动杆609的该端端部设置有第三传动齿轮610,该第三传动齿轮610分别与第一传动齿轮607和第二传动齿轮608之间啮合,第三传动杆609的另一端与第二夹丝机构的夹具本体6041之间螺纹连接。
146.当第二转动电机工作时,缠绕轮在第一传动齿轮的作用下转动,将捆扎线缠绕到纸袋袋口上;同时第一传动齿轮带动第三传动齿轮转动,第三传动齿轮转动时带动第三传动杆转动,此时第三传动杆驱动第二夹丝机构朝缠绕组件方向运动,使捆扎线的一端在缠
绕的同时朝另一端运动,实现捆扎线的缠绕操作。
147.在另一实施例中,如图12和13所示,本实施例中的缠绕机构600包括第一推送组件601、缠绕组件602和第二夹丝机构604;所述第一推送组件601的活动端设置有连接件605,第一推送组件601推动所述连接件605沿水平方向运动,所述缠绕组件602和第二夹丝机构604分别设置在连接件605上,缠绕组件602设置在第二夹丝机构604下方,所述缠绕组件602与连接件605之间滑动配合设置,所述第二夹丝机构604与缠绕组件602之间设置有第三升降组件;所述缠绕组件602包括壳体6021、缠绕轮6022和第二转动驱动机构,所述缠绕轮6022设置在壳体6021内,与壳体6021之间转动配合,使缠绕轮可沿其垂直轴线在其所在平面内做自转运动,所述缠绕轮6022上设置有供收拢呈条状的纸袋袋口伸入的定位豁口6023,缠绕轮6022上位于定位豁口6023外侧设置有定位孔6024;所述捆扎线穿设在定位孔6024内,捆扎线一端伸入到第二夹丝机构604,所述第二夹丝机构对捆扎线夹紧固定;所述第一推送组件601驱动缠绕组件602朝收拢机构的开孔中心方向水平运动,所述第二转动驱动机构驱动缠绕轮转动的同时,驱动所述第三升降组件动作,此时所述第三升降组件驱动缠绕组件在连接件上沿竖直方向做升降运动。
148.在该实施例中与上一实施例中缠绕机构在结构上的区别为,将第二夹丝机构设置到缠绕组件上方,同时改变缠绕组件、第二夹丝机构与连接件之间的运动关系,将第二夹丝机构固定设置在连接件上,而缠绕组件与连接件之间滑动配合连接,并且取消了缠绕机构中第一夹丝机构的设置。除了上述在结构上改变外,其它如第一推送组件、缠绕组件、第二夹丝机构可采用上一实施例中相同的结构,因此这里不再对第一推送组件、缠绕组件、第二夹丝机构的具体结构进行描述。
149.需要说明的是,在第三升降组件与缠绕机构、第二夹丝机构之间的连接方式上,为实现对缠绕机构的升降驱动,本实施例中第三升降组件的第三传动杆609一端与第二夹丝机构的夹具本体6041之间固定连接,另一端穿过缠绕组件的壳体,与壳体之间转动连接,在第三传动杆上设置第三传动齿轮610,第三传动齿轮610与第三传动杆609之间螺纹连接,且第三传动齿轮与壳体之间转动连接,同时该第三传动齿轮610分别与第一传动齿轮607和第二传动齿轮608之间啮合。
150.当第一传动齿轮驱动第三传动齿轮转动时,通过第三传动齿轮与第三传动杆之间的螺纹连接结构,可实现缠绕组件沿连接件的升降运动。
151.该实施例中的缠绕机构在捆扎操作时,捆扎线穿设在缠绕轮的定位孔内,捆扎线一端通过第二夹丝机构固定,如图13所示,通过控制第一推送组件的电动推杆推动连接件运动,将缠绕组件推送到待捆扎的纸袋袋口位置;此时第二转动驱动机构驱动缠绕轮转动,同时驱动第三升降组件动作,使缠绕轮在转动的同时,缠绕组件整体朝第二夹丝机构方向运动,实现将捆扎线缠绕到纸袋袋口上。通过改变缠绕机构与第二夹丝机构的设置位置,并且在捆扎操作时采用缠绕轮缠绕的同时,驱动缠绕轮朝第二夹丝机构运动,在取消设置第一夹丝机构的情况下,同样能够很好地完成对纸袋袋口的捆扎操作。
152.为实现装置套袋过程的自动化、连续化操作,装置中通过设置储丝机构、送丝机构和剪丝机构实现向缠绕机构自动输送捆扎线。
153.如图12所示,储丝机构700包括与盒体之间转动连接的绕丝盘701,此时捆扎线缠绕设置在绕丝盘701上。
154.在绕丝盘701的上方设置送丝机构800,该送丝机构800包括水平设置的送丝组件和第五转动驱动机构;如图13所示,送丝组件包括导丝辊801和送丝轮802,所述导丝辊801与送丝轮802的外圆周面摩擦配合连接,所述第五转动驱动机构驱动送丝轮转动时,送丝轮可带动导丝辊转动,所述导丝辊801外圆周面上沿其周向设置有与捆扎线配合的导丝槽803。第五转动驱动机构包括第五转动电机804,将送丝轮802与第五转动电机804的输出轴连接,驱动送丝轮802转动,捆扎线穿设在导丝槽803内,设置于导丝辊801与送丝轮802之间,当送丝轮转动时带动导丝辊发生相对转动,在两者的作用下为捆扎线提供一个拉动捆扎线的作用力,将缠绕在绕丝盘701上的捆扎线不断拉出,将捆扎线送至缠绕机构。
155.在送丝机构800上方设置剪丝机构900,如图14,该剪丝机构900包括水平设置的剪丝组件和第六转动驱动机构;剪丝组件包括设置在盒体上的固定件901和设置在固定件901上的转动盘902,所述转动盘902与固定件901之间转动连接,所述转动盘902和固定件901上分别设置有可供捆扎线穿过的过线孔903,所述转动盘902上在转动盘与固定件之间设置有切刀904,所述切刀904的刃口设置在转动盘902的过线孔903位置处;所述第六转动驱动机构驱动转动盘在固定件上转动。
156.捆扎线经过送丝组件后依次穿设到固定件、转动盘上的过线孔,当第六转动驱动机构驱动转动盘转动时,转动盘带动其上设置的切刀转动,在过线孔位置将捆扎线剪断。这里第六转动驱动机构包括第六转动电机905和设置在第六转动电机输出轴上的传动齿轮906,传动齿轮906与转动盘902之间通过齿轮啮合,此时通过控制第六转动电机即可实现对转动盘的转动控制。
157.本发明中还提供了一种基于上述幼果套袋装置的套袋方法,下面结合幼果套袋装置的结构对该装置的套袋操作过程进行详细的说明,具体包括以下步骤:
158.s10、控制取袋机构300动作并运动到储袋盒201上方;
159.s20、控制取袋机构动作并伸至储袋盒的出袋口位置,对位于储袋盒出袋口处一纸袋的一侧施加作用力,与纸袋之间形成连接;具体地,控制取袋机构300的第一伸缩组件的自由端3051运动到储袋盒的出袋口2011位置,使第一伸缩组件自由端上的第一磁吸306与纸袋上的金属片吸合;
160.s30、控制取袋机构朝张袋机构方向运动,将一纸袋从储袋盒中抽出,送至与张袋机构相对的位置处,并使纸袋位于收拢机构下方靠近开孔中心的位置;
161.s40、控制张袋机构动作并运动到纸袋位置,对取袋机构取出的纸袋另一侧施加作用力,将纸袋袋口张开;具体地,控制张袋机构400的第二伸缩组件的自由端4011朝开孔5013中心运动,使第二伸缩组件自由端上的第二磁吸402与纸袋另一侧的金属片之间吸合,控制第一伸缩组件305、第二伸缩组件401相对反向运动将纸袋袋口拉开;
162.s50、控制收拢机构500沿竖直方向朝纸袋方向运动,使纸袋袋口进入到开孔5013内;
163.s60、将幼果套袋装置伸入到幼果下方,并将幼果套入到纸袋内;
164.s70、控制收拢机构500动作,使收拢组件的叶片5014朝开孔5013中心运动,将纸袋袋口收拢呈条状;然后控制收拢机构500动作,使叶片5014朝远离开孔中心方向运动,叶片5014与纸袋之间分离;
165.s80、控制收拢机构500沿竖直方向朝远离纸袋方向运动;
166.s81、控制送丝机构800动作,使位于导丝辊801与送丝轮802之间的捆扎线朝缠绕机构600方向运动,并伸入到缠绕轮的定位孔6024内;
167.s82、控制剪丝机构900动作,使剪丝机构中的转动盘902转动,将捆扎线从转动盘处剪断;
168.s90、控制缠绕机构动作,将具有一定韧性的捆扎线缠绕到纸袋袋口上;
169.具体地,所述步骤s90中,所述缠绕机构的缠绕操作步骤包括:
170.s91、控制第一推送组件动作,将缠绕组件推送到纸袋袋口位置,使纸袋袋口卡入到缠绕轮的定位豁口内;
171.s92、控制第二夹丝机构、第一夹丝机构动作,对捆扎线一端或两端夹紧;
172.s93、控制缠绕轮转动,将捆扎线缠绕到纸袋袋口上。
173.此时完成对幼果的自动套袋操作。
174.在本发明的描述中,需要说明的是,所采用的术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
175.此外,本发明的描述中若出现“水平”、“竖直”等术语并不表示要求部件绝对水平或悬垂,而是可以稍微倾斜。如“水平”仅仅是指其方向相对“竖直”而言更加水平,并不是表示该结构一定要完全水平,而是可以稍微倾斜。
176.在本发明的描述中,还需要说明的是,除非另有明确的规定和限定,若出现术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
177.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

