1.本实用新型属于酒盒自动化生产设备技术领域,具体涉及一种纸盒贴纸和纸盒自动涂胶组装设备。
背景技术:
2.现代白酒酒盒样式繁多,纸盒贴纸与硬质纸盒本体之间一般采用涂胶组装而成纸盒,在纸盒贴纸和硬质纸盒本体涂胶粘合的工序中,目前仍然采用人工将涂胶后的纸盒贴纸和纸盒本体进行粘合,纸盒贴纸需要和纸盒本体的多个表面进行粘合,对于纸盒贴纸和硬质纸盒本体之间的相对位置要求较高,某一表面与纸盒本体对应面之间粘合错误,就会导致该纸盒报废。
技术实现要素:
3.针对上述技术问题,本发明提供一种纸盒贴纸和纸盒自动涂胶组装设备,该设备通过视觉检测机构识别纸盒贴纸与纸盒底面相对粘合区域的位置,通过搬运机器人将纸盒精确放置纸盒贴纸的对应位置,实现纸盒贴纸和纸盒的自动粘接。
4.本发明采用的技术方案如下:一种纸盒贴纸和纸盒自动涂胶组装设备,包括纸盒托盘和第一搬运机器人,纸盒整齐码垛在纸盒托盘上,第一搬运机器人设置在纸盒托盘的正上方,翻转机构设置在纸盒托盘的一侧且位于第一搬运机器人的正下方,第一搬运机器人用于从纸盒托盘上搬运单列纸盒放置到翻转机构上,纸盒输送线设置在翻转机构远离纸盒托盘的一侧,纸盒贴纸输送线设置在纸盒输送线远离翻转机构的一侧,翻转机构用于带动纸盒底面在上的状态翻转至纸盒底面在下并放置在纸盒输送线上的状态;纸盒贴纸输送线与纸盒输送线平行设置,滚胶机、视觉检测机构沿纸盒贴纸输送线的运动方向依次设置在其上方,滚胶机对纸盒贴纸的表面进行涂胶,视觉检测机构用于检测纸盒贴纸的折痕位置,第二搬运机器人位于纸盒贴纸输送线远离滚胶机的一端,第二搬运机器人从纸盒输送线上搬运纸盒放置到纸盒贴纸输送线上已涂胶的纸盒贴纸上。
5.进一步的,纸盒托盘上每层多列纸盒之间的轴向相互平行,层与层之间纸盒行列轴线交错布置,第一搬运机器人包括第一机器人机架和直角坐标机器人,直角坐标机器人安装在第一机器人机架的上端面,转动机构安装在直角坐标机器人的输出端,直角坐标机器人能够带动转动机构沿x轴、y轴、z轴方向运动,第一末端抓手安装在转动机构的输出端。
6.进一步的,转动机构包括罩壳,罩壳安装在直角坐标机器人的输出端,转动电机竖直安装在罩壳内部,转动电机的输出端伸出罩壳。
7.进一步的,第一末端抓手包括吸盘连接板,吸盘连接板的上端与转动电机的输出端相连,吸盘均布在吸盘连接板上。
8.进一步的,吸盘采用海绵吸盘。
9.进一步的,翻转机构包括翻转机架,翻转机架包括底框和两侧立板,立板沿纸盒输送线的运动方向设置在底框的两端,转轴的两端分别铰接在两侧立板的上部,翻转电机带
动转轴及其上部件运动,转动平台通过连接臂以悬置在转轴的一侧,两个侧向定位机构相对设置在转动平台两侧,两个侧向定位机构分别对转动平台上单列纸盒的两侧进行定位。
10.进一步的,侧向定位机构包括定位气缸,定位气缸安装在转动平台下端面,定位侧板与定位气缸的缸杆固连,转动平台的宽度小于纸盒的长度,转动平台的长度略小于单列纸盒的长度。
11.进一步的,还包括端向定位机构,端向定位机构包括推动气缸和定位推板,推动气缸设置在转动平台的一端,定位推板安装在推动气缸的输出端。
12.进一步的,第二搬运机器人包括四轴串联机器人本体和第二末端抓手,第二末端抓手固定在四轴串联机器人本体的末端法兰上,四轴串联机器人本体带动第二末端抓手沿x轴、y轴、z轴以及绕z轴运动。
13.进一步的,纸盒托盘的两侧设置定位框,定位框设置成单边开口的矩形,定位框的两端设置至少一个底部定位机构,底部定位机构用于对纸盒托盘的底部两端进行定位。
14.本发明的有益效果:(1)第一末端抓手通过转动机构以安装在直角坐标机器人的输出端,转动机构包括转动电机,转动电机安装在罩壳内部,第一末端抓手的执行元件采用吸盘,
15.直角坐标机器人具有三个平动自由度,吸盘通过吸盘连接板以安装在转动电机的输出端,吸盘能够在直角坐标机器人和旋转机构的带动下沿x轴、y轴、z轴以及绕z轴转动,适应于轴线交错的垛型;(2)翻转机构中转动平台的两侧设置两个侧向定位机构,从而能够防止纸盒在翻转过程中掉落,另一方面设置端面定位机构,从而能够精确对单列纸盒进行端向定位。(3)该装置采用视觉机构与第一搬运机器人、第二搬运机器人结合,能够实现纸盒贴纸和纸盒自动涂胶组装,提高自动化程度和生产效率。
附图说明
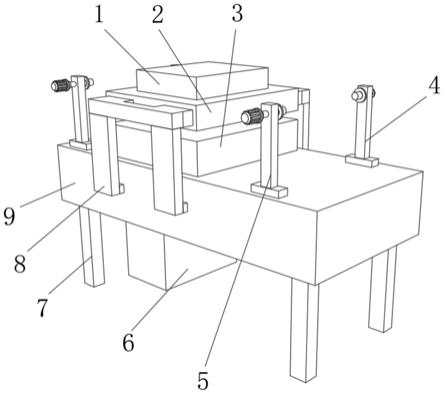
16.图1 为本发明装置的整体结构示意图。
17.图2 为本发明装置中第一搬运机器人的结构示意图。
18.图3 为本发明装置中纸盒托盘的结构示意图。
19.图4 为本发明装置中纸盒托盘另一视角的结构示意图。
20.图5 为本发明装置中翻转机构的结构示意图。
21.图6 为图5另一视角的结构示意图。
22.图中:1.纸盒托盘;2.第一搬运机器人;201.第一机器人机架;202.直角坐标机器人;231.罩壳;232.海绵吸盘;3.滚胶机;4.纸盒贴纸输送线;5.视觉检测机构;6.第二搬运机器人;7.纸盒输送线;8.翻转机构;801.定位侧板;802.转动平台;803.定位推板;804.立板;805.底框;806.翻转电机;807. 定位气缸;808.推动气缸;809.转轴;9.定位框;901.铝型材;902.底部定位机构。
具体实施方式
23.如图1
‑
图6所示,一种纸盒贴纸和纸盒自动涂胶组装设备,包括纸盒托盘1,纸盒底面朝上整齐码垛在纸盒托盘1上,第一搬运机器人2设置在纸盒托盘1的正上方,翻转机构8设置在纸盒托盘1的一侧且位于第一搬运机器人2的正下方,第一搬运机器人2从纸盒托盘1
上搬运单列纸盒放置到翻转机构8上,纸盒输送线7设置在翻转机构8远离纸盒托盘1的一侧,纸盒贴纸输送线4设置在纸盒输送线7远离翻转机构8的一侧,纸盒输送线7与纸盒贴纸输送线4平行设置,滚胶机3、视觉检测机构5沿纸盒贴纸输送线4的运动方向依次设置,第二搬运机器人6位于纸盒贴纸输送线4远离滚胶机3的一端且位于视觉检测机构5的下游,第二搬运机器人6从纸盒输送线7上搬运纸盒放置到纸盒贴纸输送线4上已涂胶的纸盒贴纸上。
24.滚胶机3对纸盒贴纸与纸盒粘合的上表面进行涂胶,纸盒贴纸通常为由无盖长方体贴纸展开而成的平面图面。
25.现有的纸盒码垛中,为了垛型的稳定,每层纸盒包括多列纸盒,每层多列纸盒之间的轴向相互平行,相邻两层之间纸盒轴线交错布置,例如最上层纸盒的单层多列纸盒轴线与次上层纸盒的单层多列纸盒轴线相互垂直。为了适应垛型,第一搬运机器人2包括第一机器人机架201和直角坐标机器人202,直角坐标机器人具有三个自动度,能够沿x轴、y轴以及z轴移动,转动机构安装在直角坐标机器人(202)的输出端,第一末端抓手安装在转动机构的输出端。从而能够调整第一末端抓手与待抓取的单列纸盒相对方向一致。
26.转动机构包括罩壳231,罩壳231安装在直角坐标机器人202的输出端,转动电机竖直在安装在罩壳231内部,转动电机的输出端伸出罩壳(231)。从而转动电机能够带动第一末端抓手绕z轴转动。第一末端抓手包括吸盘连接板,吸盘连接板的上端与转动电机的输出端相连,吸盘均布在吸盘连接板上。吸盘优选为海绵吸盘232,海绵吸盘232安装在吸盘连接杆的下端面,海绵吸盘232具有多个均布的吸嘴。
27.第一搬运机器人2带动第一末端抓手从纸盒托盘1最上层的吸取单列纸盒,当吸盘连接杆的延伸方向与待吸取的单列纸盒的轴线垂直时,转动电机带动吸盘连接杆转动90度, 使得吸盘连接杆的延伸方向与待吸取单列纸盒的轴线平行,转动电机带动吸盘连接杆吸取单列纸盒然后转动90度后将单列纸盒放置到翻转机构8上。当吸盘连接杆的延伸方向与待吸取的单列纸盒的轴线平行时,直角坐标机器人202带动吸盘连接杆吸取纸盒然后放置到翻转机构8上,从而适应相邻垛层之间的轴线相互垂直的情况。
28.翻转机构8包括翻转机架,翻转机架包括底框805和两侧立板804,立板804沿纸盒输送线7的运动方向设置在底框805的两端,转轴809的两端分别铰接在两侧立板804的上部,翻转电机806安装在立板804相邻的内侧且位于转轴809的下方,主动带轮和从动带轮设置在一侧立板的外侧,从动带轮位于主动带轮的上方,翻转电机806带动主动带轮转动,同步带连接主动带轮与从动带轮,从动带轮带动转轴809转动。两根连接臂分别嵌套在转轴809的两端且位于位于两侧立板804之间,转动平台802的两端分别安装在两根连接臂的另一端,两个侧向定位机构相对设置在转动平台802两侧,两侧定位机构相对运动,从而对单列纸盒的两侧进行定位。优选的转动平台802的宽度小于纸盒的长度,从而增加定位机构与
29.侧向定位机构包括定位气缸807,定位气缸807安装在转动平台802下端面,定位侧板801与定位气缸807的缸杆固连,优选的转动平台802的宽度小于纸盒的长度,从而定位侧板801设置在转动平台802的外侧,从而增加侧向定位机构与单列纸盒的接触面积。
30.第一搬运机器人2吸取单列纸盒的底部放置到转动平台802上,位于转动平台802两侧的定位侧板801在定位气缸807的带动下相互靠近,定位侧板801的相邻表面分别与纸盒两端接触,对单列纸盒的两侧进行定位,另一方面从而防止翻转过程中纸盒从转动平台802掉落。初始状态,纸盒托盘上单列纸盒的底部在上,第一搬运机器人2吸取单列纸盒底部
放置到转动平台802上,翻转机构8带动转动平台802翻转,纸盒底面在上的状态翻转至纸盒底面在下的状态。侧向定位机构中定位气缸807回位,单列纸盒落在纸盒输送线上,以纸盒底部在下的状态随纸盒输送线运动。
31.为了防止转动过程中,纸盒沿转动平台802的长度方向移位,以及将纸盒精确放置到纸盒输送线7上,在转动平台802的一端设置端向定位机构,端向定位机构包括推动气缸808和定位推板803,推动气缸808通过支架板以安装在转动平台802的下端面,定位推板803安装在推动气缸808的输出端,转动平台802上开有竖直的通槽,推动气缸808带动定位端板穿过通槽竖直运动,推动气缸808带动定位端板向上运动与转动平台802上纸盒端面接触。
32.视觉检测机构5检测纸盒贴纸中长方体底部展开所在的折痕位置,即检测长方体展开后的底面与侧面之间的交界线,确定纸盒的底面在纸盒贴纸上粘贴的区域,视觉处理系统计算出折痕位置的轴线与纸盒输送线7上纸盒轴线的夹角,第二搬运机器人6带动纸盒转动相应角度后放置到纸盒贴纸的对应折痕处。
33.第二搬运机器人6从纸盒输送线7上搬运纸盒放置到纸盒贴纸上对应位置,第二搬运机器人6优选为四轴串联机器人本体和第二末端抓手,第二末端抓手固定在四轴串联机器人本体的末端法兰上,四轴串联机器人本体带动第二末端抓手沿x轴、y轴、z轴以及绕z轴运动,第二末端抓手优选的采用吸盘,优选的第二末端抓手设置4个吸盘,4个吸盘呈方形排列,从而增加与纸盒的接触面积,保证吸力。
34.如图3、图4所示,纸盒托盘1的两侧设置定位框9,定位框9设置成单边开口的矩形,矩形远离纸盒输送线的一侧开口,定位框9由三根铝型材901搭接而成,人工将从矩形开口将纸盒托盘及其上纸盒送入定位框9中,定位框9的两端分别设置至少一个底部定位机构902,优选的,在定位框9的两端分别设置两个底部定位机构902,底部定位机构902对纸盒托盘1的底部两端进行定位。
35.上面结合附图对本实用新型进行了示例性描述,显然本实用新型具体实现并不受上述方式的限制,只要采用了本实用新型的方法构思和技术方案进行的各种非实质性的改进,或未经改进将本实用新型的构思和技术方案直接应用于其它场合的,均在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。