1.本实用新型涉及水果采摘技术领域,具体为一种用于水果采摘机械手结构。
背景技术:
2.水果,是指多汁且主要味觉为甜味和酸味,可食用的植物果实,水果不但含有丰富的维生素营养,而且能够促进消化。
3.在对水果进行采摘的时候,一般是采用人工的方式对水果进行采摘,但是随着社会的发展,科技的进步,为了劳动人民的身体安全,出现了一种水果采摘机械手的装置,虽说这种装置能够代替人手对水果进行采摘,但是对于一些成熟度较好的水果,其外表比较脆弱,一但对其采摘过度用力,会造成水果受损的情况,并且现有的机械手将水果摘取下来后,需要将机械手移动到地面,随后把水果放入篓子内,因此本实用新型提供一种能够将水果安全的采摘,并且保证水果安全着地的装置。
技术实现要素:
4.本实用新型的目的在于提供一种用于水果采摘机械手结构,已解决上述技术背景中提到的问题。
5.为实现上述目的,本实用新型提供以下技术方案:一种用于水果采摘机械手结构,包括支撑柱体和机械手组件,所述支撑柱体的一侧连接有滑槽一,所述滑槽一内滑动连接有滑块一和滑块二,所述滑块一和滑块二通过固定杆连接,所述机械手组件包括剪切端和活动端以及滑槽二,所述剪切端和活动端固定连接形成一个组合,且组合设有两组,两个组合成交叉设置活动连接在支撑柱体上,所述滑槽二固定连接在支撑柱体的一侧,所述滑槽二内滑动连接有两个活动块,两个所述活动块分别连接有限位块,所述活动端上设有与所述限位块相配合的开口一,所述限位块的一端贯穿滑槽二的一侧活动连接在开口一内,所述滑槽二的另一侧设有开口二,两个所述活动块的另一侧均连接有与所述开口二相配合的连接块,所述连接块的另一端贯穿开口二的一侧并向外延伸,两个所述连接块均通过连杆与所述滑块一铰接,所述支撑柱体是镂空设置,所述支撑柱体的外侧设有斜坡滑道,所述斜坡滑道和支撑柱体贯通连接形成一个通道。
6.作为本实用新型进一步方案:所述滑块一的一侧连接有弹簧,所述弹簧的另一端与所述滑槽一的内壁连接。
7.作为本实用新型进一步方案:所述滑块二上固定连接有拉杆。
8.作为本实用新型进一步方案:所述斜坡滑道和支撑柱体的内壁均设有柔性海绵垫。
9.作为本实用新型进一步方案:所述支撑柱体的外侧还铰接有支撑柱,所述支撑柱的一端连接有底座,所述底座的两侧分别设有万向轮和推手。
10.作为本实用新型进一步方案:所述底座上设有收集框。
11.综上所述,本实用新型具有以下有益效果:
12.1.本实用新型通过滑块二、固定杆、滑块一、滑槽一、滑槽二、连杆,连接块、开口二、活动块,限位块、开口一、活动端和剪切端的设置,实现可以对水果的根部进行剪断,并且通过斜坡滑道的设置,则当水果的根部剪断之后会经过斜坡滑道和支撑柱体传输到地面,这时完成水果采摘工序,通过这样的设置,实现了在不伤及水果的情况下就能对水果进行采摘,且操作简单,同时无需将装置移动到地面就能将水果传输到地面,进一步提升了采摘水果的效率。
13.2.本实用新型通过弹簧的设置,实现在对滑块二施加力,且完成水果采摘的步骤后,利用弹簧的弹力就能将两个剪切端打开,这样就节省了工作人员的操作步骤,通过拉杆的设置,方便对滑块二施加力,通过柔性海绵垫的设置,再一次减少了水果在传输中受到的伤害,通过支撑柱、底座和万向轮的设置,能够实现对机械手组件的移动和转动,避免出现由于水果的高度和位置的关系而采摘不到的情况,且推手的设置,方便工作人员推动装置本体,通过收集框的设置,实现采摘出来的水果会被收集起来,这样就节省了人力的使用。
附图说明
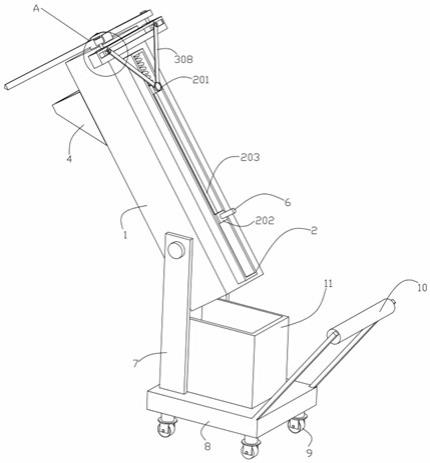
14.图1为本实用新型的第一视角立体图;
15.图2为本实用新型a的放大图;
16.图3本实用新型的第二视角立体图;
17.图4本实用新型的后视图;
18.图中:1、支撑柱体;2、滑槽一;201、滑块一;202、滑块二;203、固定杆;3、剪切端;301、活动端;302、滑槽二;303、活动块;304、限位块;305、开口一;306、开口二;307、连接块;308、连杆;4、斜坡滑道;5、弹簧;6、拉杆;7、支撑柱;8、底座;9、万向轮;10、推手;11、收集框。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.本实用新型提供以下技术方案:一种用于水果采摘机械手结构,包括支撑柱体1和机械手组件,支撑柱体1的一侧连接有滑槽一2,滑槽一2内滑动连接有滑块一201和滑块二202,滑块一201和滑块二202通过固定杆203连接,机械手组件包括剪切端3和活动端301以及滑槽二302,剪切端3和活动端301固定连接形成一个组合,且组合设有两组,两个组合成交叉设置活动连接在支撑柱体1上,滑槽二302固定连接在支撑柱体1的一侧,滑槽二302内滑动连接有两个活动块303,两个活动块303分别连接有限位块304,活动端301上设有与限位块304相配合的开口一305,限位块304的一端贯穿滑槽二302的一侧活动连接在开口一305内,滑槽二302的另一侧设有开口二306,两个活动块303的另一侧均连接有与开口二306相配合的连接块307,连接块307的另一端贯穿开口二306的一侧并向外延伸,两个连接块307均通过连杆308与滑块一201铰接,支撑柱体1是镂空设置,支撑柱体1的外侧设有斜坡滑道4,斜坡滑道4和支撑柱体1贯通连接形成一个通道,在对水果进行采摘的时候,利用滑块二202拉动固定杆203从而实现对滑块一201的施加拉力,则滑块一201受到拉力后会在滑槽
一2内滑动,滑块一201的滑动会拉动连杆308,则两个连杆308会对连接块307施加拉力,则连接块307会在开口二306内滑动,连接块307在滑动的时候带动活动块303滑动,活动块303的滑动会带动限位块304进行滑动,则限位块304会在开口一305内滑动,并且限位块304在滑动的时候,会对活动端301施加横向的力,此时两个活动端301就会相互靠近,因剪切端3和活动端301固定连接形成一个组合,且组合设有两组,两个组合成交叉设置活动连接在支撑柱体1上,则说明当活动端301相互靠近的时候,两个剪切端3也会相互靠近,利用两个剪切端3对水果的根部进行剪断,当水果剪断时候,会成自由落体样的掉落,通过斜坡滑道4的设置,则当水果的根部剪断之后会经过斜坡滑道4和支撑柱体1传输到地面,这时完成水果采摘工序,通过这样的设置,实现了在不伤及水果的情况下就能对水果进行采摘,且操作简单,同时无需将装置移动到地面就能将水果传输到地面,进一步提升了采摘水果的效率。
21.滑块一201的一侧连接有弹簧5,弹簧5的另一端与滑槽一2的内壁连接,通过弹簧5的设置,实现在对滑块二202施加力,且完成水果采摘的步骤后,利用弹簧5的弹力就能将两个剪切端3打开,这样就节省了工作人员的操作步骤。
22.滑块二202上固定连接有拉杆6,通过拉杆6的设置,方便对滑块二202施加力。
23.斜坡滑道4和支撑柱体1的内壁均设有柔性海绵垫,通过柔性海绵垫的设置,再一次减少了水果在传输中受到的伤害。
24.支撑柱体1的外侧还铰接有支撑柱7,支撑柱7的一端连接有底座8,底座8的两侧分别设有万向轮9和推手10,通过支撑柱7、底座8和万向轮9的设置,能够实现对机械手组件的移动和转动,避免出现由于水果的高度和位置的关系而采摘不到的情况,且推手10的设置,方便工作人员推动装置本体。
25.底座8上设有收集框11,通过收集框11的设置,实现采摘出来的水果会被收集起来,这样就节省了人力的使用。
26.本实用新型的一种用于水果采摘机械手结构的使用方法及工作原理如下:
27.在对水果进行采摘的时候,首先根据水果的位置,利用推手10将装置移动到指定的位置,随后将剪切端3对准水果的根部,准备好了后,利用拉杆6来带动滑块二202进行滑动,滑块二202的滑动会拉动固定杆203从而实现对滑块一201的滑动,则滑块一201的滑动会拉动连杆308,两个连杆308受到拉力后会对连接块307施加拉力,则连接块307会在开口二306内滑动,此时两个活动块303会在滑槽二302内相互靠近,随后限位块304会在开口一305内滑动,并且限位块304在滑动的时候,会对活动端301施加横向的力,此时两个活动端301就会相互靠近,因剪切端3和活动端301固定连接形成一个组合,且组合设有两组,两个组合成交叉设置活动连接在支撑柱体1上,则说明当活动端301相互靠近的时候,两个剪切端3也会相互靠近,利用两个剪切端3对水果的根部进行剪断,当水果剪断时候,会成自由落体样的掉落,通过斜坡滑道4的设置,则当水果的根部剪断之后会经过斜坡滑道4和支撑柱体1传输到地面,这时完成水果采摘工序,通过这样的设置,实现了在不伤及水果的情况下就能对水果进行采摘,且操作简单,同时无需将装置移动到地面就能将水果传输到地面,进一步提升了采摘水果的效率。
28.本具体实施例仅仅是对本实用新型的解释,其并不是对本实用新型的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本实用新型的权利要求范围内都受到专利法的保护。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

