1.本实用新型涉及农业装备技术领域,特别是涉及一种自主移动式果园施药机器人。
背景技术:
2.在水果种植过程中,经常需要对果树进行喷药以杀灭害虫,保证果树自身以及水果不受害虫祸害。当前对果园进行喷药主要以人工喷药为主,作业效率低,且喷药时工作环境恶劣,影响工作人员的健康。
技术实现要素:
3.发明目的:为了克服现有技术中存在的不足,本实用新型提供一种无需人工直接参与、作业效率高的自主移动式果园施药机器人。
4.技术方案:为实现上述目的,本实用新型的自主移动式果园施药机器人,其包括喷药装置、机械手以及减震底盘;喷药装置包括喷雾组件、鼓风机以及药液箱;所述喷雾组件包括由多个喷雾头构成的喷雾头集群;所述喷雾组件安装在所述机械手的末端;所述机械手、鼓风机以及药液箱均安装在所述减震底盘上。
5.进一步地,所述机械手具有六个转动运动轴,且其具备两个伸缩运动轴。
6.进一步地,所述机械手包括底座、第一伸缩臂、第二伸缩臂以及末端姿态调节单元;
7.所述底座能相对所述减震底盘沿竖直轴可控转动,所述第一伸缩臂的两端分别相对于所述底座及所述第二伸缩臂的一端可控转动连接;
8.所述末端姿态调节单元安装在所述第二伸缩臂的另一端,其具有三个旋转运动轴;
9.所述第一伸缩臂、第二伸缩臂各自能进行可控伸缩运动。
10.进一步地,所述减震底盘包括一底盘座体、四组驱动组件及四组减震单元;
11.四组所述驱动组件相对于所述底盘座体对称安装;所述驱动组件包括驱动电机、传动箱及驱动轮,所述驱动电机及所述驱动轮分置于所述传动箱的两侧,所述传动箱内安装有用于建立所述驱动电机及所述驱动轮之间传动关系的传动组件;
12.每个所述驱动组件均通过一独立的所述减震单元安装在所述底盘座体内。
13.进一步地,所述传动组件为链传动组件。
14.进一步地,所述减震单元包括回转连接组件与减震器;
15.所述底盘座体具备容纳箱,所述传动箱通过所述回转连接组件转动安装在所述容纳箱的外壁上;所述容纳箱内具备容纳腔,所述驱动电机与减震器均置于所述容纳腔内。
16.进一步地,所述回转连接组件包括固定在所述容纳箱上的环形件,所述环形件的内壁具备一圈环形槽;所述传动箱上圆周阵列设置有多个支撑轴,每个轴上均安装有一个轴承;每个所述轴承的外圈均嵌入在所述环形槽内。
17.进一步地,所述减震器包括连接环以及弹性片,所述连接环与所有所述支撑轴固定连接;所述弹性片有多个,所有弹性片围绕所述连接环圆周阵列设置,且每个所述弹性片一端固定在所述连接环上,另一端固定在所述容纳箱的内壁上。
18.进一步地,所述喷雾组件包括由多个喷雾头构成的喷雾头集群,还包括疏密调节装置,所述疏密调节装置用于调节所述喷雾头集群分布疏密程度。
19.有益效果:本实用新型的自主移动式果园施药机器人,通过设置喷药装置、机械手及减震底盘,减震底盘可自主或被遥控行走,机械手可改变喷药组件的位姿以适应不同的喷药需求,该施药机器人可独立执行施药作业,无需工作人员直接参与,施药效率高,且避免了人工施药对人工的伤害。
附图说明
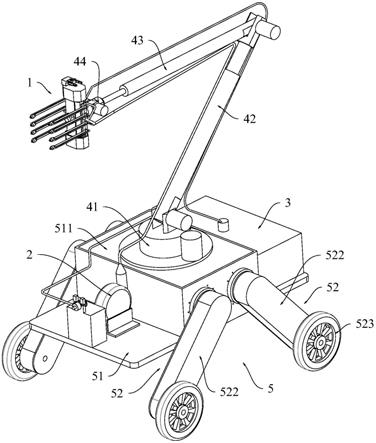
20.附图1为自主移动式果园施药机器人的结构图;
21.附图2为减震底盘的结构图;
22.附图3为驱动组件的结构图;
23.附图4为减震器的结构图;
24.附图5为喷雾组件的结构图;
25.附图6为喷雾头的结构图;
26.附图7为喷雾组件的剖视图;
27.附图8为展开状态下喷雾组件的状态图。
28.图中:1、喷雾组件;11、喷雾头;12、外壳;13、雾化器;14、入液管;15、疏密调节装置;151、装置座体;152、转动架;153、传动轴;154、硬质气管;155、第一锥齿轮;156、第二锥齿轮;157、第一同步齿轮;158、第二同步齿轮;161、第一动力齿轮;162、第二动力齿轮;163、变速箱;164、疏密调节电机;2、鼓风机;3、药液箱;4、机械手;41、底座;42、第一伸缩臂;43、第二伸缩臂;44、末端姿态调节单元;5、减震底盘;51、底盘座体;511、容纳箱;52、驱动组件;521、驱动电机;522、传动箱;523、驱动轮;524、传动组件;53、减震单元;531、环形件;531
‑
1、环形槽;532、支撑轴;533、轴承;534、连接环;535、弹性片。
具体实施方式
29.下面结合附图对本实用新型作更进一步的说明。
30.如附图1所示的自主移动式果园施药机器人,其包括喷药装置、机械手4以及减震底盘5。
31.喷药装置包括喷雾组件1、鼓风机2以及药液箱3;所述喷雾组件1安装在机械手4的末端,机械手4用于使所述喷雾组件1改变位姿;所述机械手4、鼓风机2以及药液箱3均安装在减震底盘5上。
32.所述机械手4具有六个转动运动轴,且其具备两个伸缩运动轴。具体地,所述机械手4包括底座41、第一伸缩臂42、第二伸缩臂43以及末端姿态调节单元44;所述底座41能相对所述减震底盘5沿竖直轴可控转动,所述第一伸缩臂42的两端分别相对于所述底座41及所述第二伸缩臂43的一端可控转动连接;所述末端姿态调节单元44安装在所述第二伸缩臂43的另一端,其具有三个旋转运动轴;所述第一伸缩臂42、第二伸缩臂43各自能进行可控伸
缩运动。
33.采用上述结构的机械手4,六个转动运动轴可使喷雾组件1实现各种姿态,两个伸缩臂可使喷雾组件1可作业的范围更大,如此在实际作业时可根据果树的具体形态调节喷雾组件1的位姿使得施药机器人可满足各类果树的施药要求。
34.如附图2所示,所述减震底盘5包括一底盘座体51、四组驱动组件52及四组减震单元53;四组所述驱动组件52相对于所述底盘座体51对称安装;如附图3所示,所述驱动组件52包括驱动电机521、传动箱522及驱动轮523,所述驱动电机521及所述驱动轮523分置于所述传动箱522的两侧,所述传动箱522内安装有用于建立所述驱动电机521及所述驱动轮523之间传动关系的传动组件524;每个所述驱动组件52均通过一独立的所述减震单元53安装在所述底盘座体51内。本实施例中,所述传动组件524为链传动组件,其可将驱动电机521的动力传递至驱动轮523。采用该驱动组件52,传动箱522将底盘座体51架起,保证了底盘的高度,使得整个减震底盘5具有较好的越障能力。
35.通过设置具有减震功能的减震底盘5,施药机器人具有较好的地面随形能力,可保证各驱动轮523的抓地能力,使得施药机器人可在不平整的地面上行走,不会因为果园内地形环境差而无法作业。
36.优选地,所述减震单元53包括回转连接组件与减震器;所述底盘座体51具备容纳箱511,所述传动箱522通过所述回转连接组件转动安装在所述容纳箱511的外壁上;所述容纳箱511内具备容纳腔,所述驱动电机521与减震器均置于所述容纳腔内。通过将驱动电机521置于容纳腔内,可防止驱动电机521被喷雾组件1喷出的药物淋湿而产生故障;通过将减震器置于容纳腔内,在保证减震效果的同时,可使整个减震底盘5中除了底盘座体51外其他部分外露的结构尽可能少,如此在视觉上,整个减震底盘5除了底盘座体51只有传动箱522以及驱动轮523处于外露状态,其受到外界干扰的可能性最小,相比之下,传统的多连杆式减震结构需要外露才能起到减震作用,而果园内的树枝杂草等异物易绞入减震结构中造成结构故障。
37.具体地,所述回转连接组件包括固定在所述容纳箱511上的环形件531,所述环形件531的内壁具备一圈环形槽531
‑
1;所述传动箱522上圆周阵列设置有多个支撑轴532,每个轴上均安装有一个轴承533;每个所述轴承533的外圈均嵌入在所述环形槽531
‑
1内;驱动电机521从环形件531的中间穿过,且驱动电机521的输出轴与环形件531同轴设置,通过该结构,可实现驱动电机521置于容纳腔内。传统的结构中,该部分的回转连接需要采用交叉滚子轴承连接,交叉滚子轴承的成本很高且质量很重,本实施例中该回转连接组件成本很低、质量轻、且可靠性高,可大幅降低机器人的整体造价。
38.如附图4所示,所述减震器包括连接环534以及弹性片535,连接环534设置在容纳腔内,且连接环534与所有所述支撑轴532固定连接,如此容纳腔可随传动箱522转动;所述弹性片535有多个,所有弹性片535围绕所述连接环534圆周阵列设置,且每个所述弹性片535一端固定在所述连接环534上,另一端固定在所述容纳箱511的内壁上。如此,弹性片535可作用于传动箱522以起到减震作用,上述弹性片535为折弯为非规则弧形的弹性板。
39.上述减震器结构精巧,可隐藏在容纳腔内,不会受异物干扰,使得减震底盘5能够连续无故障运行。
40.进一步地,如附图5所示,所述喷雾组件1包括由多个喷雾头11构成的喷雾头集群,
如附图6所示,每个所述喷雾头11均具备外壳12以及雾化器13;外壳12内具备气舱,所述气舱及所述雾化器13分别连接所述鼓风机2及所述药液箱3,且所述药液箱3与所述雾化器13之间连接有送液泵;所述雾化器13置于所述气舱内部,且所述雾化器13的出雾口的朝向与所述气舱的出风口的朝向一致。雾化器13的外壁与外壳12的内壁之间形成有一圈环形间隙,上述鼓风机2鼓入的气流经由该环形间隙由雾化器13的后侧流至雾化器13的前侧,并与雾化器13产生的药雾汇合后由气舱前端的出风口喷出,气流裹挟着药雾前进可使药雾喷洒至更高的地方实现对较高的果树的喷药作业。
41.为了保证气流喷出的效果,使得喷出气流的送药效果最佳,所述气舱呈圆筒状,其前后两侧均具备收窄结构,且其前后两侧分别为气流入口与气流出口;所述雾化器13呈圆柱状,其前后两侧均具备圆锥形结构,且其与所述气舱同轴设置;所述雾化器13具备入液管14,所述入液管14沿着所述雾化器13的轴向延伸并由所述外壳12的侧壁穿出。通过上述结构,气流在壳体12内沿直线行走,雾化器13后端对气流的风阻小,且雾化器13与壳体12之间形成的环形间隙有利于气流通过后汇合输出的气流的风力性能,提高送药距离,此外环形间隙可保证气流与药物充分汇合。
42.为了使得喷药装置可适应不同的喷药需求,还包括疏密调节装置15,用于对所有所述喷雾头11的分布疏密程度进行调节。通过对喷雾头11的分布密度进行调节,喷药装置的喷药的广度不同,对于不同的果树,可针对调节喷雾头11的分布疏密度,如对于较小且分布距离较远的果树,可使喷雾头11分布得密一点,而对于较大且分布距离较近的果树,可使喷雾头11分布得稀疏一点。
43.具体地,所有的所述喷雾头11分为两排排布,两排所述喷雾头11之间的排间距能够被调节,每排所述喷雾头11的间距也能够被调节。
44.如附图7所示,所述疏密调节装置15包括装置座体151,所述装置座体151上针对每一排所述喷雾头11均设置有一转动架152,对应的所述喷雾头11均通过硬质气管154转动安装在所述转动架152上;所述转动架152相对于所述装置座体151转动安装;两组所述转动架152上均固定安装有第一同步齿轮157,两个所述第一同步齿轮157相互啮合。如此,当转动架152转动可使两排喷雾头11整体作相对分散运动或作相对靠近运动。
45.所述转动架152上转动安装有传动轴153,所述传动轴153与该转动架152上的所有所述喷雾头11均具有传动关系,以驱动该排喷雾头11进行发散或聚拢运动。
46.每个所述喷雾头11对应的所述硬质气管154上均固定有第一锥齿轮155,所述传动轴153上对应于每个所述第一锥齿轮155均设置有第二锥齿轮156;同一排中所有所述喷雾头11的数量为偶数个,以一排所述喷雾头11的对称中心为分界,同一所述传动轴153上的第二锥齿轮156被分界分为两组,同一组所述第二锥齿轮156的小端朝向相同,且不同组的所述第二锥齿轮156的小端朝向相反。
47.通过上述结构,若初始状态下,所有喷雾头11聚拢在一起,当传动轴153转动,以上述分界为中心,同一排喷雾头11分为两组分别向两侧发散倾斜,使得同一排的喷雾头11逐渐分散开。优选地,为了使各喷雾头11发散开后,各喷雾头11的出风口朝向均不一致,同一传动轴153上每个喷雾头11对应的硬质气管154与该传动轴153直接锥齿轮组(即对应的第一锥齿轮155与第二锥齿轮156)的传动比均不同,且传动轴153与靠近边缘位置的硬质气管154之间的传动比比其与靠近中间位置的硬质气管154之间的传动比更小,如此,可使传动
轴153转动同等角度时,靠近边缘的硬质气管154转动的角度更大,靠近中间的硬质气管154转动的角度更小,从而同一根传动轴153上的喷雾头11可充分发散开,不仅是直线距离变大,而且各喷雾头11喷出方向的相对角度也增大,可增大喷雾的覆盖范围。
48.优选地,转动架152与传动轴153同轴设置,且两排喷雾头11对应的两个传动轴153上各固定有第二同步齿轮158,两个第二同步齿轮158相互啮合,如此两根传动轴153可同步等速反向转动。
49.此外,其中一转动架152上安装有第一动力齿轮161,该转动架152对应的传动轴153上安装有第二动力齿轮162,第一动力齿轮161与第二动力齿轮162之间设置有变速箱163,其中一转动架152与疏密调节电机164驱动连接。通过上述结构,通过控制疏密调节电机164转动,即可实现转动架152自身转动以及转动架152上硬质气管154转动的联动,节约驱动成本。如附图8所示为喷雾头分散开后喷雾组件1的状态图。
50.本实用新型的自主移动式果园施药机器人,通过设置喷药装置、机械手及减震底盘,减震底盘可自主或被遥控行走,机械手可改变喷药组件的位姿以适应不同的喷药需求,该施药机器人可独立执行施药作业,无需工作人员直接参与,施药效率高,且避免了人工施药对人工的伤害。
51.以上所述仅是本实用新型的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

