1.本实用新型涉及一种机器人悬挂系统技术领域,特别是涉及一种机器人减震装置。
背景技术:
2.机器人的应用日趋广泛,例如仿生机器人、教育机器人、送餐机器人、迎宾机器人以及巡检机器人等等。
3.在现有技术中,具有底盘的移动机器人多种多样,但现有技术中机器人在复杂环境运行时减震能力差,影响机器人的作业效果和使用寿命。在不平整的路面上行驶时,产生较强的颠簸,不能保证机器人平稳的运行姿态,影响机器人的操作性能,同时,底盘长期受到震动,容易使底盘上的零件松动,存在一定的安全隐患。
技术实现要素:
4.本实用新型是为了解决现有技术中的不足而完成的,本实用新型的目的是提供一种结构简单、提升机器人的操作性能、保证机器人平稳的运行姿态、提高机器人的作业效果和使用寿命的机器人减震装置。
5.本实用新型的一种机器人减震装置,包括底板以及左右对称可拆卸式设置于所述底板上的驱动轮模块和驱动轮组件,所述驱动轮组件包括驱动轮轴和旋转连接于所述驱动轮轴左端的驱动轮本体,所述驱动轮轴的右端与所述驱动轮模块的后端下部可解除式卡接,所述驱动轮模块的前部与所述底板旋转连接,所述驱动轮模块的后端上部和所述底板在所述驱动轮模块的后方弹性连接,所述底板可拆卸式固定于机器人的底部。
6.本实用新型的一种机器人减震装置还可以是:
7.所述驱动轮模块的后端上部设置有弹性部件,所述弹性部件的前后两端分别与所述驱动轮模块的后端上部和所述底板可拆卸式固定。
8.所述驱动轮模块包括安装臂,所述安装臂的前部与所述底板旋转连接,所述安装臂的后端底部与所述驱动轮轴的右端可解除式卡接,所述安装臂的后端上部与所述底板在所述安装臂的后方弹性连接。
9.所述驱动轮模块还包括固定片,所述固定片的下部与所述安装臂的后端上部可拆卸式固定,所述固定片的上部与所述底板在所述安装臂的后方弹性连接。
10.所述驱动轮模块包括固定块组件,所述固定块组件的中部与所述安装臂的前部旋转连接,所述固定块组件的底部与所述底板可拆卸式固定。
11.所述固定块组件包括设置于所述安装臂左右两侧的第一固定块和第二固定块,所述第一固定块和所述第二固定块的底部均与所述底板可拆卸式固定,所述第一固定块的右侧面外周与所述第二固定块的左侧面外周可拆卸式固定,所述第一固定块和所述第二固定块围设有容纳所述安装臂前部的第一腔体,所述安装臂前部在所述第一腔体内分别与所述第一固定块和所述第二固定块旋转连接。
12.所述第一固定块的右侧面和所述第二固定块的左侧面的中心位置处均一体成型或固定有旋转孔,所述安装臂的前部左右两侧分别在所述旋转孔对应位置处分别与所述第一固定块和所述第二固定块旋转连接。
13.所述安装臂的前部左右两侧分别一体成型或固定有旋转轴,所述安装臂与所述第一固定块和所述第二固定块分别通过所述旋转轴穿设于所述旋转孔内旋转连接。
14.所述安装臂的后部下方可拆卸式固定有第三固定块,所述驱动轮轴上下两侧分别所述安装臂和所述第三固定块可解除式卡接。
15.所述安装臂的后部下方与所述第三固定块围设有容纳所述驱动轮轮轴端的第二腔体,所述驱动轮轴端在所述第二腔体内分别于所述安装臂和所述第三固定块可解除式卡接。
16.本实用新型的一种机器人减震装置,包括底板以及左右对称可拆卸式设置于所述底板上的驱动轮模块和驱动轮组件,所述驱动轮组件包括驱动轮轴和旋转连接于所述驱动轮轴左端的驱动轮本体,所述驱动轮轴的右端与所述驱动轮模块的后端下部可解除式卡接,所述驱动轮模块的前部与所述底板旋转连接,所述驱动轮模块的后端上部和所述底板在所述驱动轮模块的后方弹性连接,所述底板可拆卸式固定于机器人的底部。这样,所述底板与机器人的底部可拆卸式固定,机器人行走时,所述底板随机器人一起向前移动,所述驱动轮本体旋转连接于所述驱动轮轴的左端,所述驱动轮轴的右端与所述驱动轮模块的后端下部可解除式卡接,进而所述驱动轮本体在机器人行进过程中绕所述驱动轮模块的后端下部做旋转运动,而所述驱动轮模块的前部与所述底板旋转连接,因此所述驱动轮模块在机器人行进过程中绕所述底板做旋转运动,进而所述驱动轮本体在机器人行进过程中可以绕所述底板旋转调节,而所述驱动轮模块的后端上部和所述底板在所述驱动轮模块的后方弹性连接,这样始终有一个弹性力作用在所述底板和所述驱动轮模块之间,这个弹性力的方向为沿所述驱动轮模块至所述底板位于所述驱动轮模块后方的位置,如果机器人行进过程中遇到坑洼不平的路面时,所述驱动轮模块带动所述驱动轮本体绕所述底板上下旋转,即所述驱动轮模块的后端会发生上下的轻微位移,而弹性力的方向也会随着所述驱动轮模块的后端的位移发生相对变化,因此弹性力可以分解为水平方向和铅垂方向的力,在这两个方向对所述驱动轮本体的震动进行缓冲减震,进而提升机器人的操作性能,使机器人始终在运行过程中保持平稳姿态,进而提高机器人的作业效果和使用寿命。本实用新型的一种机器人减震装置,相对于现有技术的优点是:结构简单、提升机器人的操作性能、保证机器人平稳的运行姿态、提高机器人的作业效果和使用寿命。
附图说明
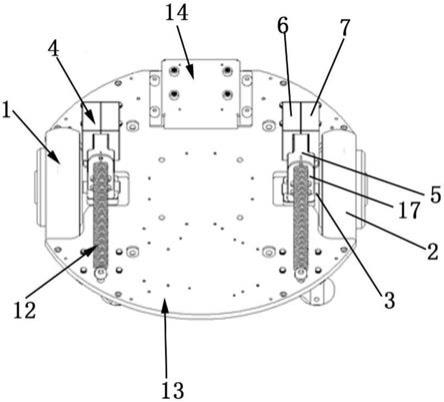
17.图1本实用新型一种机器人减震装置结构示意图。
18.图2本实用新型一种机器人减震装置部分示意图。
19.图3本实用新型一种机器人减震装置部分爆炸图。
20.图4本实用新型一种机器人减震装置驱动轮组件和驱动轮模块搭接图。
21.图5本实用新型一种机器人减震装置爆炸图。
22.图6本实用新型一种机器人减震装置安装臂与第一固定块搭接图。
23.图7本实用新型一种机器人减震装置沿驱动轮轴纵向剖视图。
24.图号说明
[0025]1…
驱动轮组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ2…
驱动轮本体
ꢀꢀꢀꢀꢀꢀ3…
驱动轮轴
[0026]4…
驱动轮模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ5…
安装臂
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ6…
第一固定块
[0027]7…
第二固定块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ8…
旋转孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ9…
旋转轴
[0028]
10
…
第一腔体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11
…
第二腔体
ꢀꢀꢀꢀꢀꢀꢀ
12
…
弹性部件
[0029]
13
…
底板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14
…
万向轮组件
ꢀꢀꢀꢀꢀ
15
…
第三固定块
[0030]
16
…
凹槽
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
17
…
固定片
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
18
…
旋转轴承
具体实施方式
[0031]
在本实用新型的描述中,需要说明的是,术语“上”、“下”、“左”、“右”、“内”、“外”、“垂直”、“水平”等指示方位或位置关系为基于附图所示的方位或者位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
[0032]
本实用新型的一种机器人减震装置的所述万向轮组件14在前侧,所述驱动轮本体2在后侧,所述固定片17在上侧,所述第三固定块15在下侧,所述驱动轮本体2在左侧,所述安装臂5在右侧,并以此确定“前”、“后”、“左”、“右”、“上”、“下”的方向,所述弹性部件12、所述驱动轮模块4和所述驱动轮组件1在所述底板13上左右对称设置,本实用新型中的可拆卸式固定可以是通过螺钉,还可以是其他一些方式进行。本实用新型是以左侧的所述弹性部件12、所述驱动轮模块4和所述驱动轮组件1构成关系进行说明。
[0033]
下面结合附图的图1至图7对本实用新型的一种机器人减震装置作进一步详细说明。
[0034]
本实用新型的一种机器人减震装置,请参考图1至图7中相关各图,包括底板13以及左右对称可拆卸式设置于所述底板13上的驱动轮模块4和驱动轮组件1,所述驱动轮组件1包括驱动轮轴3和旋转连接于所述驱动轮轴3左端的驱动轮本体2,所述驱动轮轴3的右端与所述驱动轮模块4的后端下部可解除式卡接,所述驱动轮模块4的前部与所述底板13旋转连接,所述驱动轮模块4的后端上部和所述底板13在所述驱动轮模块4的后方弹性连接,所述底板13可拆卸式固定于机器人的底部。这样,所述底板13与机器人的底部可拆卸式固定,机器人行走时,所述底板13随机器人一起向前移动,所述驱动轮本体2旋转连接于所述驱动轮轴3的左端,所述驱动轮轴3的右端与所述驱动轮模块4的后端下部可解除式卡接,进而所述驱动轮本体2在机器人行进过程中绕所述驱动轮模块4的后端下部做旋转运动,而所述驱动轮模块4的前部与所述底板13旋转连接,因此所述驱动轮模块4在机器人行进过程中绕所述底板13做旋转运动,进而所述驱动轮本体2在机器人行进过程中可以绕所述底板13旋转调节,而所述驱动轮模块4的后端上部和所述底板13在所述驱动轮模块4的后方弹性连接,这样始终有一个弹性力作用在所述底板13和所述驱动轮模块4之间,这个弹性力的方向为沿所述驱动轮模块4至所述底板13位于所述驱动轮模块4后方的位置,如果机器人行进过程中遇到坑洼不平的路面时,所述驱动轮模块4带动所述驱动轮本体2绕所述底板13上下旋转,即所述驱动轮模块4的后端会发生上下的轻微位移,而弹性力的方向也会随着所述驱动轮模块4的后端的位移发生相对变化,因此弹性力可以分解为水平方向和铅垂方向的力,在
这两个方向对所述驱动轮本体2的震动进行缓冲减震,进而提升机器人的操作性能,使机器人始终在运行过程中保持平稳姿态,进而提高机器人的作业效果和使用寿命。本实用新型的一种机器人减震装置,相对于现有技术的优点是:结构简单、提升机器人的操作性能、保证机器人平稳的运行姿态、提高机器人的作业效果和使用寿命。
[0035]
本实用新型的一种机器人减震装置,请参考图1至图7中相关各图,在前面技术方案的基础上还可以是:所述驱动轮模块4的后端上部设置有弹性部件12,所述弹性部件12的前后两端分别与所述驱动轮模块4的后端上部和所述底板13可拆卸式固定。这样,所述驱动轮模块4的后端上部与所述底板13通过所述弹性部件12弹性连接,弹性力的方向始终沿所述弹性部件12的方向,当所述驱动轮模块4后端的位置发生变化时,弹性力的方向也随之发生变化,但因为弹性力可以分解为水平方向和铅垂方向的两个分力作用在所述驱动轮模块4的后端,因此所述弹性部件12的减震作用也始终作用在所述驱动轮模块4后端的水平方向和铅垂方向,减小了所述驱动轮模块4在机器人进行过程中前后方向和上下方向上的震动,进而减小了机器人的前后方向和上下方向的震动。所述弹性部件12可以是弹簧等。
[0036]
本实用新型的一种机器人减震装置,请参考图1至图7中相关各图,在前面技术方案的基础上还可以是:所述驱动轮模块4包括安装臂5,所述安装臂5的前部与所述底板13旋转连接,所述安装臂5的后端底部与所述驱动轮轴3的右端可解除式卡接,所述安装臂5的后端上部与所述底板13在所述安装臂5的后方弹性连接。这样,所述安装臂5的前部与所述底板13旋转连接,所述安装臂5的后端底部与所述驱动轮轴3的右端可解除式卡接,所述安装臂5连接了所述底板13和所述驱动轮轴3,使所述驱动轮轴3可以绕所述底板13与所述安装臂5的固定点进行旋转运动,而所述安装臂5的后端上部与所述底板13在所述安装臂5的后方弹性连接,进而使所述安装臂5在机器人行进过程中始终受到水平方向和铅垂方向的弹性力,而弹性力可以抵消所述安装臂5所承受的来自机器人的重力以及机器人行进过程中受到的震动力,从力学分析上来自坑洼不平的路面的震动力和所述安装臂5的后端上部与所述底板13之间的弹性力均可以分解为水平方向和铅垂方向,铅垂方向的两个力和所述安装臂5所受的机器人重力可以在机器人行进过程中保持均衡,因此所述安装臂5在减震过程中起到至关紧要的作用。进一步优选的技术方案为所述驱动轮模块4还包括固定片17,所述固定片17的下部与所述安装臂5的后端上部可拆卸式固定,所述固定片17的上部与所述底板13在所述安装臂5的后方弹性连接。这样,所述固定片17的上部与所述底板13在所述安装臂5的后方弹性连接,所述固定片17的下部与所述安装臂5的后端上部可拆卸是固定,所述固定片17增加了所述安装臂5的后端上部的高度,使所述固定片17的上部至所述底板13、所述底板13至所述安装臂5的后端下部以及所述安装臂5的后端下部至所述固定片17的上部形成三角形的三个边,而三角形的稳定性增加了机器人在行进过程中的稳定性,不管机器人受到的震动力来自哪个方向,所述固定片17和所述底板13的弹性连接都可以通过调整长度来适应所述安装臂5后端的位置变化。更进一步优选的技术方案为所述弹性部件12的前后两端分别与所述固定片17的上部和所述底板13可拆卸式固定。这样,所述固定片17的上部与所述底板13通过所述弹性部件12在所述安装臂5的后方弹性连接,弹性力的方向始终沿所述弹性部件12的方向,当所述固定片17的位置随所述驱动轮模块4的位置发生变化时,弹性力的方向也随之发生变化,但因为弹性力可以分解为水平方向和铅垂方向的两个分力作用在所述固定片17上,因此所述弹性部件12的减震作用也始终作用在所述固定片17的水
平方向和铅垂方向,进而作用在所述驱动轮模块4上,减小了所述驱动轮模块4在机器人进行过程中前后方向和上下方向上的震动,进而减小了机器人的前后方向和上下方向的震动。
[0037]
本实用新型的一种机器人减震装置,请参考图1至图7中相关各图,在前面技术方案的基础上还可以是:所述驱动轮模块4包括固定块组件,所述固定块组件的中部与所述安装臂5的前部旋转连接,所述固定块组件的底部与所述底板13可拆卸式固定。这样,所述安装臂5的前部旋转连接于所述固定块组件的中部,所述固定块组件的底部可拆卸式固定于所述底板13上,所述固定块组件增加了所述安装臂5的前部与所述底板13固定位置处的高度,使所述安装臂5在绕所述固定块组件的中部旋转时避免因为所述底板13位置太低而与地面或工作面发生干涉现象,进而所述安装臂5前部与所述底板13之间旋转连接的稳固性。进一步优选的技术方案为所述固定块组件包括设置于所述安装臂5左右两侧的第一固定块6和第二固定块7,所述第一固定块6和所述第二固定块7的底部均与所述底板13可拆卸式固定,所述第一固定块6的右侧面外周与所述第二固定块7的左侧面外周可拆卸式固定,所述第一固定块6和所述第二固定块7围设有容纳所述安装臂5前部的第一腔体10,所述安装臂5前部在所述第一腔体10内分别与所述第一固定块6和所述第二固定块7旋转连接。这样,所述第一固定块6与所述第二固定块7分别设置在所述安装臂5前部的左右两侧,所述第一固定块6和所述第二固定块7围设形成所述第一腔体10,将所述安装臂5前部夹设在所述第一腔体10内,所述第一腔体10使所述安装臂5前部可以上下旋转0
‑
10
°
的空间,进而使所述安装臂5在机器人的行进过程中分别在左右两侧同时受到所述第一固定块6和所述第二固定块7的支撑力,且所述安装臂5的前部在所述第一腔体10内绕所述第一固定块6和所述第二固定块7的中心旋转,保证了所述安装臂5始终在所述第一腔体10内做旋转运动,进而保证了所述安装臂5在机器人行进过程中更加稳定,防止所述安装臂5因为机器人的震动来自于不同方向导致所述安装臂5的前部发生倾斜进而导致所述驱动轮本体2发生倾斜。
[0038]
本实用新型的一种机器人减震装置,请参考图1至图7中相关各图,在前面技术方案的基础上还可以是:所述第一固定块6的右侧面和所述第二固定块7的左侧面的中心位置处均一体成型或固定有旋转孔8,所述安装臂5的前部左右两侧分别在所述旋转孔8对应位置处分别与所述第一固定块6和所述第二固定块7旋转连接。这样,所述旋转孔8分别设置在所述第一固定块6的右侧面中心位置处和所述第二固定块7的左侧中心位置处,而所述安装臂5的前部左右两侧在所述旋转孔8的对应位置处分别与所述第一固定块6和所述第二固定块7旋转连接,使所述安装臂5绕所述旋转孔8的轴心位置做旋转运动,进而精确确定了所述安装臂5的旋转中心轴,进而使所述安装臂5在减震过程中的旋转运动更加稳定。进一步优选的技术方案为所述安装臂5的前部左右两侧分别一体成型或固定有旋转轴9,所述安装臂5与所述第一固定块6和所述第二固定块7分别通过所述旋转轴9穿设于所述旋转孔8内旋转连接。这样,所述旋转轴9穿设于所述旋转孔8内,使所述安装臂5的前部左右两侧插设在左右两侧的所述旋转孔8内,增加了所述安装臂5与所述旋转孔8的接触部分,使所述安装臂5可以在所述旋转孔8内稳定旋转,所述旋转轴9穿设于所述旋转孔8内,限定了所述安装臂5的左右方向,使所述安装臂5只能在所述第一腔体10内沿上下方向旋转。更进一步优选的技术方案为所述旋转孔8和所述旋转轴9之间夹设有旋转轴承18,左右两侧的所述旋转轴承18外周分别与所述第一固定块6和所述第二固定块7可拆卸式固定,左右两侧的所述旋转轴承
18内周分别与所述安装臂5左右两侧的所述旋转轴9可拆卸是固定,所述旋转孔8和所述旋转轴9通过所述旋转轴承18内周和外周夹设的滚珠体旋转连接。这样,所述旋转轴承18减少了所述旋转轴9在所述旋转孔8内旋转时,左右两侧的所述旋转轴9分别与所述第一固定块6和所述第二固定块7之间的摩擦力,进而增加了所述驱动轮模块4各部件的使用寿命。
[0039]
本实用新型的一种机器人减震装置,请参考图1至图7中相关各图,在前面技术方案的基础上还可以是:所述安装臂5的后部下方可拆卸式固定有第三固定块15,所述驱动轮轴3上下两侧分别所述安装臂5和所述第三固定块15可解除式卡接。这样,所述第三固定块15从所述驱动轮轴3的前方和后方将所述驱动轮轴3卡接在所述安装臂5的后部底面上,使所述驱动轮轴3在机器人行进过程中发生震动时始终卡接在所述安装臂5和所述第三固定块15之间。进一步优选的技术方案为所述安装臂5的后部下方与所述第三固定块15围设有容纳所述驱动轮轮轴端的第二腔体11,所述驱动轮轴3端在所述第二腔体11内分别于所述安装臂5和所述第三固定块15可解除式卡接。这样,所述安装臂5的后部与所述第三固定块15围设形成所述第二腔体11,所述驱动轮轴3始终卡接在所述第二腔体11的对应位置处,所述驱动轮本体2与所述驱动轮轴3的左端旋转连接,进而所述第二腔体11使所述驱动轮本体2在机器人的行进过程中不会发生偏移和晃动。更进一步优选的技术方案为所述安装臂5的后端底部和所述第三固定块15的顶部分别一体成型或固定有凹槽16,所述凹槽16围设形成所述第二腔体11。这样,所述凹槽16的侧壁分别与所述驱动轮轴3的外周紧密贴合,所述凹槽16不但可以给所述驱动轮轴3提供空间,还防止所述驱动轮轴3在所述第二腔体11内因为机器人的行进而发生偏移。
[0040]
本实用新型的一种机器人减震装置,请参考图1至图7中相关各图,在前面技术方案的基础上还可以是:所述底板13的前部可拆卸式固定有万向轮组件14,所述万向轮组件14与两个所述驱动轮本体2呈等腰三角形分布。这样,所述万向轮组件14到两个所述驱动轮本体2的距离相等,机器人的重力均匀分配到所述万向轮组件14和两个所述驱动轮本体2上,在机器人的行进过程中,所述万向轮组件14位于机器人行进方向的前侧,两个所述驱动轮本体2左右对称分布在所述万向轮组件14的左右两侧,使得即使机器人在坑洼不平的道路中行驶时,经过对所述驱动轮本体2的减震作用后依然不会发生偏斜而倾倒,辅助机器人的平衡。
[0041]
上述仅对本实用新型中的几种具体实施例加以说明,但并不能作为本实用新型的保护范围,凡是依据本实用新型中的设计精神所作出的等效变化或修饰或等比例放大或缩小等,均应认为落入本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

