1.本发明涉及巡检机器人领域,具体涉及一种电缆隧道巡检机器人和方法。
背景技术:
2.随着城市电缆的普及和发展,对电缆巡检工人的需求变大。然而,传统的人工巡检存在着很多不足,例如工人的劳动强度大、工作效率低,检测质量分散、手段单一,人工检测的数据也无法准确、及时地接入管理信息系统。
3.针对这一问题,目前已经将刚性隧道巡检机器人应用到隧道巡检工作当中,代替巡检工人在高风险的环境中作业,实现全天候高质量的巡检,真正起到减员增效的作用,省去了大量人工抄录数据的时间,它可以做到定时定点,使得巡视人员可以将注意力集中在机器人无法检测的项目上,在一定程度上保证了巡视的质量,能更快地推进电缆隧道无人值守的进程。
4.传统的刚性巡检机器人普及的同时,其使用也存在一定的局限性。例如:传统关节式机器人其电机、减速器、传感器及控制器均集成于关节模块,整臂体积大、质量重、灵活性差,难以满足狭小空间操作要求。
技术实现要素:
5.为了克服现有的技术的不足、对机器人的运动性能进行改善,本发明提出一种电缆隧道巡检方法和机器人。
6.本发明的技术方案具体如下:
7.一种电缆隧道巡检方法,包括如下步骤:
8.巡检机器人根据图像采集器和位置传感器反馈的信息,控制驱动部件带动软性本体沿电缆隧道运动,规避障碍物;
9.采集电缆隧道中的气体成分及浓度、温度、湿度信息,比对后,如出现异常,报警并反馈异常信息至上位机。
10.进一步地,遇到障碍或者前方通过的空间过于狭小时,巡检机器人软性本体发生变形,驱动部件相应地伸展或收缩,以绕开障碍物或适应狭小空间。
11.进一步地,伸展或收缩具体是一个或几个sma弹簧受热,上升到一定温度后保持恒温状态,sma弹簧收缩,使机器人发生变形。
12.进一步地,巡检机器人最大行走速度为10cm/s。
13.进一步地,采集的气体包括氧气o2、甲烷ch、一氧化碳co、二氧化碳co2、硫化氢h2s、二氧化硫so2,当o2的浓度低于20%、ch的浓度超过1%,co的浓度超过0.0024%,co2的浓度超过1.5%,h2s的浓度超过0.00066%、so2的浓度超过0.0005%时,机器人发出警报;
14.当温度高于40℃时,机器人发出警报;
15.当湿度高于70%时,机器人发出警报。
16.本技术还涉及的一种电缆隧道巡检机器人,包括本体,本体中设有驱动部件,驱动
部件与控制器连接,控制器与若干传感器、显示器、图像采集器、传输单元和存储器连接,若干传感器包括气体传感器、温度传感器、湿度传感器和位置传感器传感器;
17.控制器根据图像采集器和位置传感器反馈的信息,控制驱动部件带动本体沿电缆隧道运动,规避障碍物;
18.气体传感器、温度传感器、湿度传感器采集电缆隧道中的气体成分及浓度、温度、湿度信息,控制器将所属信息与设定的条件比对,反馈异常信息至上位机。
19.进一步地,本体为两侧带有软性伸缩足的软性条状结构,伸缩足一端设有吸盘;驱动部件包括与控制器连接若干加热部件和空气压缩机,若干加热部件分别与sma弹簧连接,sma弹簧穿过伸缩足的空腔设于伸缩足的底部。
20.进一步地,包括一个气体传感器,设于巡检机器人的其中一个伸缩足上;
21.四个温度传感器和四个湿度传感器,分别装在软性条状结构的四周;
22.位置传感器为商用传感器;磁通量传感器嵌入到伸缩足的末端,通过三维电磁跟踪系统对末端的坐标和角度进行实时反馈,并将反馈信号传给控制器和上位机。
23.进一步地,传输单元包括发射线圈和接收线圈,发射线圈外径设计比机器人体内的接收线圈大,确保在机器人在循迹轨道移动的过程中,其内部线圈仍大部分处于轨道线圈所产生的磁场中,充电效率至少为73.5%。
24.进一步地,发射线圈的尺寸为53.6mm
×
47.6mm、厚度0.4mm、匝数为23;接收线圈的尺寸为45.2mm
×
33.6mm、厚度0.4mm、匝数为16。
25.与现有技术相比,本发明的有益效果具体如下:
26.本发明的巡检机器人设计合理、结构简单、操作方便。本体无任何硬质零件与结构,完全由软材料构成,整体柔韧性很好。其中的硬件电子电路部分体积小,对机器人的整个体积影响小。采用无线充电的方式,解决了传统电池充电带来的一系列问题。
附图说明
27.图1是本发明的巡检机器人的结构示意图;
28.图2是本发明的巡检机器人的电子电路部分的安装示意图。
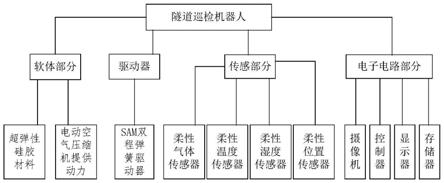
29.图3是本发明的巡检机器人的结构框图;
30.图4是本发明的巡检机器人的控制电路框图。
具体实施方式
31.下面将结合本技术实施例中的附图,对实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
32.除非另外定义,本技术实施例中使用的技术术语或者科学术语应当为所属领域内具有一般技能的人士所理解的通常意义。本实施例中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。“包括”或者“包含”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。“安装”、“相连”、“连接”应做广义理解,例如,
可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。“上”、“下”、“左”、“右”、“横”以及“竖”等仅用于相对于附图中的部件的方位而言的,这些方向性术语是相对的概念,它们用于相对于的描述和澄清,其可以根据附图中的部件所放置的方位的变化而相应地发生变化。
33.如图1、2所示,本实施例的电缆隧道巡检机器人,包括本体2,本体2中设有驱动部件,驱动部件与控制器4连接,控制器4与传感器、显示器6、摄像头1、传输单元和存储器连3接,传感器包括气体传感器、温度传感器、湿度传感器和位置传感器传感器;控制器根据图像采集器和位置传感器反馈的信息,控制驱动部件带动本体沿电缆隧道运动,规避障碍物;气体传感器、温度传感器、湿度传感器采集电缆隧道中的气体成分及浓度、温度、湿度信息,控制器将所属信息与设定的条件比对,反馈异常信息至上位机。
34.本实施例的本体为两侧带有软性伸缩足的软性条状结构,伸缩足2.1一端设有吸盘2.2。本实施例包括一个气体传感器,设于巡检机器人的其中一个伸缩足上;四个温度传感器和四个湿度传感器,分别装在软性条状结构的四周。
35.驱动部件包括与控制器连接若干加热部件,若干加热部件分别与sma弹簧连接,sma弹簧穿过伸缩足的空腔设于伸缩足的底部。
36.如图1所示,本实施例的巡检机器人为四足软体机器人,搭载了驱动控制单元,所需的燃料存储、电源及驱动模块均采用软体材料由3d打印技术打印而成。在特定的轨迹处布置发送线圈,由于电磁感应,该软体机器人体内的接收线圈获得电能,使得机器人可以沿着布置好的特定的轨迹进行隧道巡检工作。该机器人结构可分为本体部分、驱动器部分、传感部分和柔性电子电路部分。
37.本体部分是由超弹性硅胶材料制成,并使用空气压缩机提供动力,本体中部有一个空腔,这整个空腔贯穿于本体的内部,空腔截面处的气孔与空气压缩机的气管相连接,通过对空腔进行充放气,可以使机器人自主行进长达2小时。
38.伸缩足2.1由四个同样的单元体构成,每个单元体内部都设有空腔2.4,用来改变内部气压,使机器人发生形变或运动。通过控制器控制,根据预设路线,在轨道中执行巡检任务。伸缩足2.1上还设有引风机2.3。
39.驱动器部分是采用形状记忆合金(sam)双程弹簧驱动器来驱动机器人的软体结构,将四个sma弹簧嵌入到机器人本体中,利用位置传感器将目标方向传送给上位机,上位机计算出四个sma弹簧伸缩所需的位移和驱动力对应的目标温度,通过升温达到目标温度,驱动机器人朝某个方向的运动。sma弹簧机器人软体部分的布置如图2所示。
40.当机器人遇到障碍或者前方通过的空间过于狭小,控制器会对机器人本体的其中一个或几个sma弹簧直接通电,通过控制通电电流的大小,使sma弹簧的加热温度达到70℃,通过温度传感器实时监测加热温度并保持通电电流不变,使加热温度为70℃恒温状态,sma弹簧收缩,使机器人发生变形。
41.当机器人穿越障碍以后自动断电,机器人恢复四足式。当四个sma弹簧同时通电时,四个sma弹簧的收缩拉动外壳缩短,并在断电后自动恢复原始状态;仅让左右两部分sma弹簧中的一部分通电,另一部分不通电,这可以实现左右弯曲运动;同理,仅让上下两部分的一部分sma弹簧通电,可以实现上下弯曲运动。
42.控制电路图如图4所示,摄像机将拍摄到的具有通过障碍的图片传给上位机,上位
机对图片进行处理,并对四个sma弹簧通入不同的电流使其变形,温度传感器实时监测温度并将温度信息传输给上位机。
43.机器人的四足分别装有四个引风机和八个吸盘,吸盘具有吸附力,可以将机器人吸附在隧道壁上。将两根sma线圈并排穿过由硅橡胶混合物组成的软体机器人体内,构成了一个基于sma驱动的软体机器人,通过有序地驱动五个驱动器可以实现爬行、翻滚等动作,其最大行走速度可达10cm/s。
44.传感部分由多种柔性传感器组成。其中,柔性气体传感器有一个,装在机器人的其中一个软体伸缩足关节处,用来检测氧气o2、甲烷ch、一氧化碳co、二氧化碳co2、硫化氢h2s、二氧化硫so2气体的浓度,并将这六种气体的浓度数据实时传输给上位机;柔性温度传感器和柔性湿度传感器各有四个,分别装在软体的四周;当温度高于40℃、湿度高于70%、当o2的浓度低于20%、ch的浓度超过1%,co的浓度超过0.0024%,co2的浓度超过1.5%,h2s的浓度超过0.00066%、 so2的浓度超过0.0005%时,机器人会通过报警器发出警报,并将警报信号传输给上位机;
45.位置传感器为商用传感器trakstar tm,将磁通量传感器(em sensor)嵌入到软体四足的末端,利用三维电磁跟踪系统对末端的坐标和角度进行实时反馈,并将反馈信号传给上位机。
46.电子电路部分,包括控制器、电子显示器、接收线圈、云台摄像机以及磁盘存储器,如图1所示,位于机器人本体部分的上方。
47.本实施例中控制器采用c语言开发,置于机器人软体上端,用来和上位机进行通讯交流;电子显示器采用lcd2004液晶显示,用于显示当前检测的气体及其浓度、当前的位置坐标、华氏温度、湿度;磁盘存储器采用ac24c02的存储器,用于存储机器人的的工作程序;云台摄像机采用灵眸osmo口袋云摄像机,物理防抖、拍摄画质稳定高清。
48.发送线圈和接收线圈5均采用漆包铜线圈,其中发射线圈尺寸为 53.6mm
×
47.6mm、厚度0.4mm、匝数为23;接收线圈的尺寸为45.2mm
×
33.6mm、厚度0.4mm、匝数为16。发射线圈外径设计比机器人体内的接收线圈大,确保在机器人在循迹轨道移动的过程,其内部线圈仍大部分处于轨道线圈所产生的磁场中,充电效率为73.5%。
49.本实施例还包括现有的无线充电器,无线充电器与控制器连接。
50.控制器可以是现有的通用处理器,包括中央处理器(central processing unit, cpu)、网络处理器(network processor,np)等;还可以是数字信号处理器(digitalsignalprocessing,dsp)、专用集成电路(application specific integrated circuit, asic)、现场可编程门阵列(field-programmable gate array,fpga)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件。
51.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

