基于5g通信的软体机械手采摘无人车
技术领域
1.本实用新型属于采摘设备领域,具体涉及一种基于5g通信的软体机械手采摘无人车。
背景技术:
[0002]“云平台”技术是一种计算机扩展技术,可采用不计其数的实体主机提供庞大站点的虚拟环境,是一种可伸缩使用计算机资源的方法。“云平台”由大型计算机和服务器组成,能够与硬件设施(如无人车)进行数据交换。
[0003]
5g技术提高了数据传输带宽和速度,提高了设备接入的规模,这就意味着更大的系统容量,意味着数据流量的惊人增长,需要更大规模的核心网络与之相适应。通过5g可以连接大量的设备,因此5g网络成为物联网的重要连接技术。5g时代会产生大量的数据。根据麦肯锡的报告,到2020年,通信服务提供商将为5g和物联网的应用产生多达44 zb的数据。这些数据,只有通过基于云计算的大数据存储和分析、使用人工智能深度学习的数据分析手段,才能够得到及时有效的处理。
[0004]
有鉴于此,将无人车与5g网络结合能够解决在水果采摘过程中使用人工智能算法运算量大,运算时间长的问题。从而从硬件方面大大提升了农业无人车的智能化水平。
技术实现要素:
[0005]
为解决上述问题,本实用新型公开了一种基于5g通信的软体机械手采摘无人车。
[0006]
为了达到上述目的,本实用新型提供如下技术方案:
[0007]
一种基于5g通信的软体机械手采摘无人车,包括无人车本体、5g通信组件、相机以及采摘组件;无人车本体的中部表面配合设有收集箱;相机的数量为两个,分别安装于无人车本体的前端两侧;采摘组件包括机械手调节机构以及机械手;机械手调节机构设置于无人车本体的前端中部,并配合连接机械手,机械手调节机构包括依次配合相连的升降电机、伸缩电机、翻转电机以及采摘电机;机械手与采摘电机的输出端配合相连;5g通信组件包括5g信号收发装置与控制处理器;控制处理器与两个相机相连接、5g信号收发装置、无人车本体中的驱动装置以及机械手调节机构通信相连接。进一步地,机械手为软体机械手,包括安装板以及软体夹块;软体夹块的数量为3~4个,一端均匀分布于安装板的外侧表面,另一端呈向内弯曲状设置。进一步地,软体夹块的数量为4个。进一步地,升降电机、伸缩电机、翻转电机以及采摘电机均为步进电机,且分别与控制处理器相连接。进一步地,升降电机与伸缩电机之间、伸缩电机与翻转电机之间、以及翻转电机与采摘电机之间均通过镂空铝片相安装。进一步地,相机为cmos相机。进一步地,相机的外侧还设有相机保护壳。
[0008]
本实用新型与现有技术相比,具有如下有益效果:
[0009]
1、针对环境复杂的果园,通过相机的定位,准确识别果实是否成熟,并通过机械手调节机构准确调整机械手的位置进行采摘;2、机械手调节机构具有优秀的自由度,有助于提升采摘过程的灵活性及稳定性;
[0010]
3、通过5g通信组件实现果实的识别、无人车本体的移动以及机械手的位置调整,响应更加快速,提升采摘效率。
附图说明
[0011]
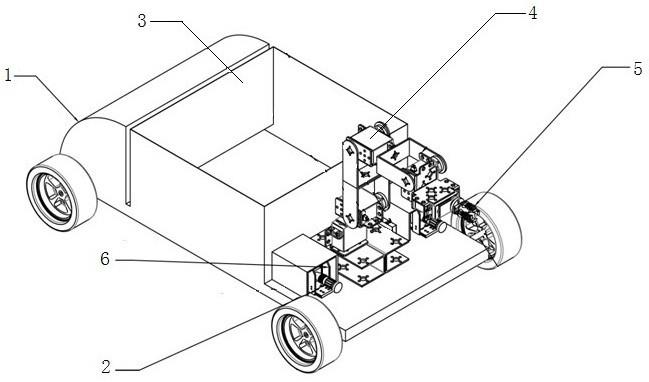
图1、本实用新型的结构示意图;
[0012]
图2、本实用新型中机械手的结构示意图。
[0013]
附图标记列表:无人车本体1、相机2、收集箱3、机械手调节机构4、机械手5、安装板51、软体夹块52、相机保护壳6。
具体实施方式
[0014]
以下将结合具体实施例对本实用新型提供的技术方案进行详细说明,应理解下述具体实施方式仅用于说明本实用新型而不用于限制本实用新型的范围。
[0015]
如图1所示为本实用新型的结构示意图,本实用新型为一种基于5g通信的软体机械手采摘无人车,包括无人车本体1、5g通信组件、相机2以及采摘组件。
[0016]
无人车本体1的中部表面配合设有收集箱3。
[0017]
相机2的数量为两个,分别安装于无人车本体1的前端两侧,相机2为cmos相机,外侧还设有相机保护壳6。
[0018]
采摘组件包括机械手调节机构4以及机械手5;机械手调节机构设置于无人车本体1的前端中部,并配合连接机械手5,机械手调节机构4包括依次配合相连的升降电机、伸缩电机、翻转电机以及采摘电机,升降电机与伸缩电机之间、伸缩电机与翻转电机之间、以及翻转电机与采摘电机之间均通过镂空铝片相安装;机械手5与采摘电机的输出端配合相连,如图2所示,机械手5为软体机械手,包括安装板51以及软体夹块52;软体夹块52的数量为4个,一端均匀分布于安装板51的外侧表面,另一端呈向内弯曲状设置。
[0019]
5g通信组件包括5g信号收发装置与控制处理器;控制处理器与两个相机2相连接、5g信号收发装置、无人车本体1中的驱动装置以及机械手调节机构4通信相连接,具体地,机械手调节机构4中的升降电机、伸缩电机、翻转电机以及采摘电机均为步进电机,且分别与控制处理器相连接。
[0020]
本实用新型在运行时,无人车本体1在果园内行走,两个相机2对待采水果进行捕捉定位,经过控制处理器处理后,通过5g信号收发装置发送至5g“云平台”,由5g“云平台”对获取到的信息进一步处理,再通过5g信号收发装置向控制处理器发送移动以及采摘指令。
[0021]
控制处理器首先通过无人车本体1中的驱动装置调节无人车本体1与水果的相对位置,再通过升降电机、伸缩电机、翻转电机以及采摘电机带动机械手5针对水果的位置进行竖直升降调节、水平距离调节、完成水果采摘后的翻转至收集箱3,以及针对水果的旋转采摘,以此完成整个采摘过程。
[0022]
最后需要说明的是,以上实施例仅用以说明本实用新型的技术方案而非限制性技术方案,本领域的普通技术人员应当理解,那些对本实用新型的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,均应涵盖在本实用新型的权利要求范围当中。
技术特征:
1.一种基于5g通信的软体机械手采摘无人车,其特征在于:包括无人车本体(1)、5g通信组件、相机(2)以及采摘组件;所述无人车本体(1)的中部表面配合设有收集箱(3);所述相机(2)的数量为两个,分别安装于无人车本体(1)的前端两侧;所述采摘组件包括机械手调节机构(4)以及机械手(5);所述机械手调节机构设置于无人车本体(1)的前端中部,并配合连接机械手(5),机械手调节机构(4)包括依次配合相连的升降电机、伸缩电机、翻转电机以及采摘电机;所述机械手(5)与采摘电机的输出端配合相连;所述5g通信组件包括5g信号收发装置与控制处理器;所述控制处理器与两个相机(2)相连接、5g信号收发装置、无人车本体(1)中的驱动装置以及机械手调节机构(4)通信相连接。2.根据权利要求1所述的一种基于5g通信的软体机械手采摘无人车,其特征在于:所述机械手(5)为软体机械手,包括安装板(51)以及软体夹块(52);所述软体夹块(52)的数量为3~4个,一端均匀分布于安装板(51)的外侧表面,另一端呈向内弯曲状设置。3.根据权利要求2所述的一种基于5g通信的软体机械手采摘无人车,其特征在于:所述软体夹块(52)的数量为4个。4.根据权利要求1所述的一种基于5g通信的软体机械手采摘无人车,其特征在于:所述升降电机、伸缩电机、翻转电机以及采摘电机均为步进电机,且分别与控制处理器相连接。5.根据权利要求4所述的一种基于5g通信的软体机械手采摘无人车,其特征在于:所述升降电机与伸缩电机之间、伸缩电机与翻转电机之间、以及翻转电机与采摘电机之间均通过镂空铝片相安装。6.根据权利要求1所述的一种基于5g通信的软体机械手采摘无人车,其特征在于:所述相机(2)为cmos相机。7.根据权利要求6所述的一种基于5g通信的软体机械手采摘无人车,其特征在于:所述相机(2)的外侧还设有相机保护壳(6)。
技术总结
本实用新型提供一种基于5G通信的软体机械手采摘无人车,包括无人车本体、5G通信组件、相机以及采摘组件。本实用新型针对环境复杂的果园,通过相机的定位,准确识别果实是否成熟,并通过机械手调节机构准确调整机械手的位置进行采摘;机械手调节机构具有优秀的自由度,有助于提升采摘过程的灵活性及稳定性;通过5G通信组件实现果实的识别、无人车本体的移动以及机械手的位置调整,响应更加快速,提升采摘效率。效率。效率。
技术研发人员:郭晓宇
受保护的技术使用者:南京林业大学
技术研发日:2021.02.05
技术公布日:2021/10/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

