1.本实用新型涉及机器人领域,具体说是一种用于精确定位、末端姿态拟合的串并混联机械臂。
背景技术:
2.串联机构广泛用于机械手,机器人,其优点是工作范围大,缺点是用逆解算法进行位姿控制非常复杂,末端对目标姿态的微小偏转不敏感,使其在工作时需要随机拟合目标姿态的场合,无法使用。并联机构工作范围相对较小,但用逆解算法进行位姿控制比较简单,可以随时通过控制系统发出指令,使其末端拟合目标微小的姿态变化。本实用新型的思路是将串联机构和并联机构混合组合成机械臂,工作时首先利用串联机构工作范围大的特性,将末端执行器移动到目标点,再通过指令操作并联偏转机构,将末端执行器姿态与目标姿态相拟合。这种机械臂可用于嫁接机械手、人机协同机械手等。
技术实现要素:
3.本实用新型在于提供一种末端可偏转的六自由度串并混联机械臂,其工作范围大、控制简单、末端可以偏转并拟合目标姿态。
4.为了实现以上目的,本实用新型采用的技术方案是:
5.一种末端可偏转的六自由度串并混联机械臂。主要由固定底座、旋转平台、连杆、旋转关节、固定关节、关节电机、并联二自由度偏转平台构成,旋转平台固定在固定底座上,各旋转关节可以通过固定在固定关节上的关节电机驱动下绕关节轴线转动,若干杆件通过回转关节和固定关节连接成为一个串联机构,第一个杆件的旋转关节与旋转平台连接,最后一个杆件的末端与并联二自由度偏转平台的定平台固定连接。
6.进一步特征是,并联二自由度偏转平台由一个定平台、两个并联支链、一个动平台、两个支链电机构成;构成方式是两个电机固定安装在定平台上两个并联支链一端与电机轴相连,另一端与动平台相连。
7.进一步特征是,第一支链由定平台、第一支链电机、u型连杆、销轴动平台构成,使动平台延第一支链电机轴线方向转动;第二支链由定平台、第二支链电机、l型连杆、l型中间连杆、销轴动、平台构成,使动平台绕第二支链电机轴线转动。
8.进一步特征是,并联二自由度偏转平台两支链电机垂直放置在同一平面内,电机轴线垂直相交于一点,并与动平台销轴的轴线交点重合,皆为并二自由度并联机构的球心,动平台只做绕球心的旋转运动,使动平台同时绕两电机轴线方向偏转。
附图说明
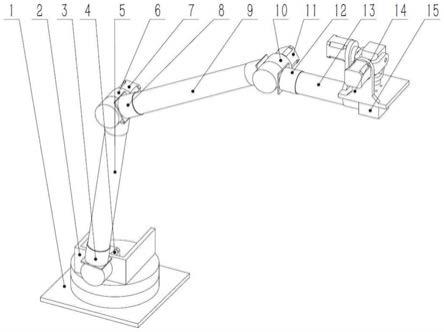
9.图1是六自由度串并混联机械臂的三维结构图。
10.图2是六自由度串并混联机械臂中的并联二自由度偏转平台的三维结构图。
11.附图中,1是固定底座、2是旋转平台、3是第一旋转关节、4是第一关节电机、5是第
一连杆、6是第一固定关节、7是第二关节电机、8是第二旋转关节、9是第二连杆、10是第二固定关节、11是第三关节电机、12是第三旋转关节、13是第三连杆、14是并联二自由度偏转平台、15是第三固定关节、14a是定平台、14b是销轴一、14c是第一支链电机、14d是销轴二、14e是u型连杆、14f是定平台、14g是l型中间连杆、14h是销轴三、14i是l型连杆、14j是第二支链电机。
具体实施方式
12.如附图所示,该六自由度串并混联机械臂由固定底座、旋转平台、连杆、旋转关节、固定关节、关节电机、并联二自由度偏转平台构成,其结构是旋转平台(2)固定在固定底座(1)上可绕轴线旋转;第一关节电机(4)固定在旋转平台(2)上随旋转平台转动;第一旋转关节(3)与第一关节电机(4)相连,在第一关节电机(4)的驱动下绕第一关节电机(4)轴线转动;第一连杆(5)的前端固定在第一旋转关节(3)上,第一固定关节(6)固定在第一连杆(5)的末端,在第一旋转关节(3)的带动下运动;第二关节电机(7)固定在第一固定关节(6)上,第二转动关节(8)与第二关节电机(7)相连,在第二关节电机(7)的驱动下绕第二关节电机(7)轴线转动;第二连杆(9)的前端固定在第二旋转关节(8)上,第二固定关节(10)固定在第二连杆(9)的末端,在第二关节电机(7)的带动下运动;第三关节电机(11)固定在第二固定关节(10)上,第三旋转关节(12)与第三关节电机(11)相连,在第三关节电机(11)的驱动下绕第三关节电机(11)轴线转动;第三连杆(13)前端固定在第三旋转关节(12)上,第三固定关节(15)固定在第三连杆(13)末端,在第三关节电机(11)的带动下运动;并联二自由度偏转平台(14)的定平台(14a)与第三固定关节(15)固定连接。并联二自由度偏转平台(14)由定平台(14a)、销轴一(14b)、第一支链电机(14c)、销轴二(14d)、u型连杆(14e)、定平台(14f)、l型中间连杆(14g)、销轴三(14h)、l型连杆(14i)、第二支链电机(14j)构成。构成方式是第一支链电机(14c)固定连接在定平台(14f)上,u型连杆(14e)固定连接在第一支链电机(14c)上,随第一支链电机(14c)转动,u型连杆(14e)又通过销轴一(14b)与动平台相连;第二支链电机(14j)固定连接在定平台(14f)上与第一支链电机(14c)垂直,l型连杆(14i)固定连接在第二支链电机(14j)上,随第二支链电机(14j)转动,l型中间连杆(14g)通过销轴二(14d)连接,可绕销轴二(14d)转动;l型中间连杆(14g)通过销轴三(14h)与动平台(14f)连接;动平台可分别绕销轴一(14b)与销轴三(14h)转动。
技术特征:
1.一种末端可偏转的六自由度串并混联机械臂,主要由固定底座、旋转平台、连杆、旋转关节、固定关节、关节电机、并联二自由度偏转平台构成,其特征在于:旋转平台固定在固定底座上,各旋转关节可以通过固定在固定关节上的关节电机驱动下绕关节轴线转动,若干杆件通过回转关节和固定关节连接成为一个串联机构,第一个杆件的旋转关节与旋转平台连接,最后一个杆件的末端与并联二自由度偏转平台的定平台固定连接。2.根据权利要求1所述的末端可偏转的六自由度串并混联机械臂,其特征在于:并联二自由度偏转平台由一个定平台、两个并联支链、一个动平台、两个支链电机构成;构成方式是两个电机固定安装在定平台上,两个并联支链一端与电机轴相连,另一端与动平台相连;第一支链由定平台、第一支链电机、u型连杆、销轴动平台构成,使动平台延第一支链电机轴线方向转动;第二支链由定平台、第二支链电机、l型连杆、l型中间连杆、销轴、动平台构成,使动平台绕第二支链电机轴线转动;两支链电机垂直放置在同一平面内,电机轴线垂直相交于一点,并与动平台销轴的轴线交点重合,皆为并二自由度并联机构的球心,动平台只做绕球心的旋转运动,使动平台同时绕两电机轴线方向偏转。
技术总结
一种末端可偏转的六自由度串并混联机械臂。主要由固定底座、旋转平台、连杆、旋转关节、固定关节、关节电机、并联二自由度偏转平台构成,旋转平台固定在固定底座上,各旋转关节可以通过固定在固定关节上的关节电机驱动下绕关节轴线转动,若干杆件通过回转关节和固定关节连接成为一个串联机构,第一个杆件的旋转关节与旋转平台连接,最后一个杆件末端的固定关节与并联二自由度偏转平台的定平台固定连接。这种机械臂,具有六个自由度,通过各回转关节的转动,使末端的执行器到达目标点,然后控制系统向并联二自由度偏转平台发转动的指令,动平台产生相应偏转运动,使执行器拟合目标姿态。种机械臂可以在较大空间内,方便准确地到达目标点,且使执行器拟合目标姿态,特别适用于工作范围大,需要随机地变换目标点,目标姿态不确定的场合。采用这种机械臂,可以显著提高抓取机械手的性能。高抓取机械手的性能。高抓取机械手的性能。
技术研发人员:李娜 周舒骅 张立杰 王斌 张佳成 左鸿宽
受保护的技术使用者:河北农业大学
技术研发日:2021.03.09
技术公布日:2021/10/18
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

