1.本发明涉及停车设施技术领域,尤其涉及一种智能车辆停放系统。
背景技术:
2.随着汽车工业的发展和人民生活水平的提高,汽车的普及越来越广泛,城市人均汽车占有量不断增加,且仍以每20%到30%的速度增长,与此同时,汽车的停放问题也越来越突出,由于城市地面的空间有限,人们开始大量使用机械式立体停车设备,以解决停车位不足的问题。
3.目前常见的机械式立体停车设备有升降横移类、垂直循环类、多层循环类、水平循环类、平面移动类、巷道堆垛类、垂直升降类、简易升降类、汽车专用升降机9种,其中升降横移类以其结构简单、操作方便、安全可靠、造价低、规模可大可小等优点,在国内车库市场占有85%以上的市场份额。
4.升降横移类机械式立体停车设备通过横向移动底层载车板,使上层载车板可降落到地面进行车辆的存取,一般为多层立体结构,设置若干层停车层,每层停车层上并列停放若干辆车,主体框架采用型钢围合连接而成,框架的一侧面开口,其底层作为车辆进出的通道。每一个停车位都相应地设置载车板,底层停车层的载车板能横移不升降,顶层的载车板能升降不横移,而中间层的载车板既能横移,也可升降,每一个载车板都设置有相互配合的驱动装置。中间层和底层停车层上必须至少有一个停车位空置,即不设置相应的载车板,而顶层载车板可将该停车层充满。地面层车位直接存取车辆,非地面层车位存取车时,需要位于待存取车位下方的车位的载车板先横移,使待存取车位的下方形成空位,然后该车位的载车板下降到达地面后方可存取车辆。
5.现有技术的机械式停车位在停车过程中存在两个安全隐患:一、通常,机械式停车位的宽度比车轮间距稍大,在以较大速度倒车入库时,车轮与停车位的间距不易掌控,进而车轮容易碾压停车位边缘,产生损坏车轮轮毂等风险。二、当前轮抵达坡面后,车体大部分已经位于停车位中,此时,车体的尾部与停车位后侧间距较小,车辆仍需要较大的速度或深踩油门才能使前轮移动完全进入停车位,由于车速较大,并且车体的尾部与停车位后侧间距较小,需要驾驶员及时深踩刹车以实现车辆的制动,刹车减速过慢,车辆容易冲出停车位,刹车减速过急,将降低停车过程中的舒适程度。
6.因此,本技术旨在提供一种能够克服上述缺陷的一种智能车辆停放系统。
技术实现要素:
7.本发明的目的在于克服现有技术的缺点,提供一种智能车辆停放系统。
8.本发明的目的通过以下技术方案来实现:一种智能车辆停放系统,包括立体框架、支撑部和检测器,所述支撑部包括彼此之间具有高度差的升降机构和支撑板,在所述检测器检测到车辆处于入库状态的情况下,所述升降机构处于第一工作状态,使得所述高度差逐渐减小至零,在所述检测器检测到车辆处于出库状态的情况下,所述升降机构由所述第
一工作状态切换为所述第二工作状态,使得所述高度差呈周期性增大和减小的状态。
9.优选的,在所述检测器检测到车辆处于所述入库状态的情况下,所述升降机构配置为按照如下步骤由所述第一工作状态切换为第三工作状态,使得所述高度差增大至最大值并保持不变:向驾驶员发送提供停车时长数据的请求,并基于所述停车时长数据确定车辆的出库时间;在停放该车辆的支撑板按照早于所述出库时间设定时长的方式提前由第一位置切换为第二位置的情况下,所述升降机构由所述第一工作状态切换为所述第三工作状态。
10.优选的,所述智能车辆停放系统还包括用于对车辆入库需求进行检测的车辆识别器,在所述车辆识别器检测到车辆入库需求的情况下,所述升降机构配置为保持第一工作状态,并且通过声和/或光的方式向外界传递支撑部的使用状态信息和/或位置信息。
11.优选的,所述升降机构至少包括能够移动以改变所述高度差的托板以及用于对托板的工作状态进行控制的控制器,所述控制器配置为按照如下方式对托板的工作状态进行控制:在所述检测器检测到车辆处于入库状态的情况下,获取托板的重量数据;在托板的重量增加的情况下,生成第一控制命令以控制托板沿第一设定方向移动设定距离,使得所述高度差逐渐减小至零;在托板的重量减小的情况下,生成第二控制命令以控制托板沿第二设定方向移动设定距离,使得所述高度差逐渐增大至最大值。
12.优选的,所述升降机构上设置有用于提醒驾驶员进行缴费的反光标识,在所述检测器检测到车辆处于出库状态的情况下,所述控制器生成第三控制命令以使得所述托板周期性交替沿所述第一设定方向和所述第二设定方向移动,并生成用于完成缴费的缴费信息,其中,在驾驶员基于所述缴费信息完成缴费操作的情况下,控制器生成第四控制命令以使得托板沿所述第二设定方向移动。
13.优选的,所述支撑板与地面之间设有呈倾斜状的挡板,挡板的第一端连接至所述支撑板,挡板的第二端与地面抵靠接触,挡板的宽度大于托板的宽度,挡板上设置有贯通槽,在所述托板沿所述第一设定方向或所述第二设定方向移动的情况下,所述托板能够进入所述贯通槽以穿过所述挡板。
14.优选的,所述推杆电机至少包括第一推杆电机和第二推杆电机,第一推杆电机设置于托板的沿车辆的出库方向的第一侧,第二推杆电机设置于托板的沿所述出库方向的第二侧,其中,在所述检测器检测到车辆处于所述出库状态的情况下,所述第一推杆电机和所述第二推杆电机配置为按照如下方式工作:在第一时间段内,第一推杆电机缩短以使得托板呈第一侧低于第二侧的倾斜状态;在第二时间段内,第一推杆电机和第二推杆电机以相同的速度缩短,使得托板与地之间的距离逐渐减小;在第三时间段内,第一杆推杆电机伸长,且第二推杆电机保持静止,使得托板呈第一侧与第二侧的高度相同的水平状态。
15.优选的,所述智能车辆停放系统配置有若干个所述立体框架,在所述车辆识别器检测到车辆入库需求的情况下,所述控制器配置为:获取当前时刻下具有空闲的放置空间的立体框架以形成第一名单;获取当前时刻下具有车辆出库需求的立体框架以形成第二名单;将第一名单和第二名单中重复的立体框架删除以获取第三名单;向第三名单中的立体框架所对应的升降机构发送控制命令,以使得该升降机构能够通过声和/或光的方式向外界传递支撑部的使用状态信息和/或位置信息。
16.本发明具有以下优点:
17.(1)本发明在使用时,当检测到车辆倒车入库停车,并且托板的总重量超过设定阈值时,控制器产生第一控制命令,使得托板向上移动,进而使得托板的上表面与支撑板的上表面位于同一高度上,随后只需轻踩油门,前轮或后轮即可移动至支撑板上,进而能够缩短停车时间、停车油耗并且减少安全隐患的发生。
18.(2)现有技术的停车位在停车过程中存在两个问题:一、某些地下停车库出口通常具有一定的坡度,收费站设置在出口位置,当驾驶员停车缴费时,会影响后续车辆,进而导致出口出现拥堵。二、当出口拥堵后,大量车辆停放在坡面上并重新起步时,针对新手司机,容易出现溜车的风险,进而会发生前后车碰撞的事故,最终进一步加剧出口的拥堵。本技术在使用时,通过升降机构的阻挡以使得驾驶员提前完成缴费,进而能够避免在出口处发生碰撞事故以及拥堵。
19.(3)在停车入库过程中,驾驶员一者不用踩刹车,进而降低了车辆入库的操作繁琐度,二者,在托板持续上升的过程中,车辆将处于持续缓慢后退的状态,进而能够降低停车时长。在车辆出库的过程中,驾驶员无需在出库过程中踩刹车,进而能够降低出库的操作繁琐度。同时,车辆始终处于怠速状态,不会出现车速过快和高度差的存在而产生的车辆颠簸,进而能够提高汽车出库过程中的驾驶舒适度。
附图说明
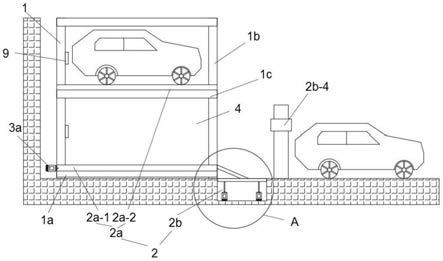
20.图1为本发明优选的智能车辆停放系统的整体结构示意图;
21.图2为本发明优选的智能车辆停放系统的主视图;
22.图3为本发明优选的支撑板与基座的连接机构示意图;
23.图4为部位a的局部放大示意图;
24.图5为另一种形态下部位a的局部放大示意图;
25.图6为另一种形态下部位a的局部放大示意图;
26.图7为本发明优选的各电子元器件的连接关系示意图。
27.图中,1
‑
立体框架、2
‑
支撑部、3
‑
驱动部、1a
‑
基座、1b
‑
立柱、1c
‑
加强杆、4
‑
放置空间、2a
‑
支撑板、2b
‑
升降机构、2b
‑1‑
托板、2b
‑2‑
推杆电机、2b
‑3‑
质量监测器、2b
‑4‑
控制器、2a
‑1‑
第一支撑板、2a
‑2‑
第二支撑板、5
‑
滑轨、6
‑
齿条、7
‑
齿轮、3a
‑
第一驱动电机、3b
‑
第二驱动电机、3c
‑
链条、8
‑
齿轮座、9
‑
检测器、10
‑
反光标识、11
‑
车辆识别器、12
‑
闪烁灯、13
‑
挡板、14
‑
贯通槽、15
‑
第一推杆电机、16
‑
第二推杆电机。
具体实施方式
28.下面结合附图对本发明做进一步的描述,本发明的保护范围不局限于以下所述:
29.实施例1
30.如图1至图7所示,本技术提供一种智能车辆停放系统,至少包括立体框架1、支撑部2和驱动部3。支撑部2和驱动部3均设置于立体框架1中。支撑部2滑动设置于立体框架1上,使得支撑部2之能够沿彼此垂直的第一方向或第二方向滑动,第一方向和第二方向彼此垂直,例如,如图1所示,第一方向可以是左右方向,第二方向可以是竖直方向。驱动部3耦合至支撑部2以为支撑部2的移动提供驱动力。在实际使用时,车辆停放在支撑部2上后,通过驱动部3即可实现车辆停放位置的改变。
31.优选的,立体框架1至少包括基座1a、若干个立柱1b和若干个加强杆1c。基座1a可以呈平板状,在使用时,其按照保持水平状态的方式放置于地面上。立柱1b的一端连接至基座1a,使得立柱1b与基座1a保持大致垂直的状态。立体框架1能够被立柱1b分隔出若干个放置空间4。立柱1b的数量与放置空间4的数量相关。例如,如图2所示,放置空间4的数量为4时,立柱的数量为6。放置空间4在基座1a上的投影能够呈四边形状。立柱1b则设置于该投影的四个角部。相邻的两个立柱1b之间可以设置至少一个加强杆1c以增强立体框架1的结构稳定性。
32.优选的,支撑部2至少包括若干个支撑板2a和若干个升降机构2b。支撑板2a滑动设置于基座1上以能够沿第一方向或第二方向移动。具体的,如图2所示,将本发明的放置空间4的数量设置为4,此时,立体框架1具有上下两层,每层具有两个放置空间4。支撑部2具有一个第一支撑板2a
‑
1和两个第二支撑板2a
‑
2。第一支撑板2a
‑
1能够沿第一方向移动。第二支撑板2a
‑
2能够沿第二方向移动。基座1a上设置有滑轨5,滑轨5中设置有齿条6。第一支撑板2a
‑
1上转动设置有能够与齿条6啮合的齿轮7。第一支撑板2a
‑
1的端部嵌套设置于滑轨5中,使齿轮7与齿条6啮合,进而当齿轮7旋转时即可实现第一支撑板2a
‑
1的移动。驱动部3至少包括第一驱动电机3a、第二驱动电机3b和链条3c。第一驱动电机3a设置于第一支撑板2a
‑
1上,并与齿轮7连接以为齿轮7的旋转提供驱动力。立柱1b的顶部设置有齿轮座8,链条3a的一端与齿轮座8啮合,链条3c的另一端与第二支撑板2a
‑
2连接。第二驱动电机3b设置于立柱1b的顶部并与齿轮座8连接,使得第二驱动电机3b通电工作的情况下,齿轮座8能够被带动而旋转,最终在链条3a缠绕于齿轮座8上时,第二支撑板2a
‑
2向上运动,或者在链条3a与齿轮座8逐渐脱离缠绕时,第二支撑板2a
‑
2向下运动。在使用时,第一支撑板2a
‑
1左右移动后,即可将下层的放置空间4腾空,此时,第二支撑板2a
‑
2即可向下运动,从而实现停放在上层的车辆的取用。
33.优选的,每一个放置空间4均配置至少一个升降机构2b。在车辆的前轮或后轮放置在升降机构2b上后,升降机构2b能够将车辆向上抬起设定距离。在支撑板2a的上表面与地而之间具有第一距离d1情况下,升降机构2b向上抬起的设定距离与第一距离d1大致相等。升降机构2b与支撑板2a之间的高度差大致等于第一距离d1。具体的,升降机构2b至少包括托板2b
‑
1、推杆电机2b
‑
2、质量监测器2b
‑
3和控制器2b
‑
4。地面上可以设置有地基坑,推杆电机2b
‑
2设置于地基坑中。托板2b
‑
1连接至推杆电机2b
‑
2,推杆电机2b
‑
2可以是推杆电机,进而在推杆电机2b
‑
2的通电工作的情况下,托板2b
‑
1能够向上移动或向下移动。质量监测器2b
‑
3可以设置在托板2b
‑
1上。质量监测器2b
‑
3可以是压力传感器,进而在车辆对质量监测器2b
‑
3进行挤压时,即可得到托板2b
‑
1的总重量。质量监测器2b
‑
3通信地耦合至控制器2b
‑
4,使得质量监测器2b
‑
3采集到的压力数据能够传输至控制器2b
‑
4,控制器2b
‑
4对压力数据进行处理即可得到重量数据。推杆电机2b
‑
2通信地耦合至控制器2b
‑
4,进而通过控制器2b
‑
4产生的控制命令即可对推杆电机2b
‑
2的工作状态进行调整。例如,当质量监测器2b
‑
3采集的压力数据值大于设定阈值时,控制器2b
‑
4产生第一控制命令,推杆电机2b
‑
2响应第一控制命令而推动托板2b
‑
1向上运动。当质量监测器2b
‑
3采集的压力数据值小于设定阈值时,控制器2b
‑
4产生第二控制命令,推杆电机2b
‑
2响应第二控制命令而带动托板2b
‑
1向下运动。现有技术的机械式停车位,支撑板2a的上表面与地面之间具有一定的高度差,为了便于车辆停放,支撑板2a的一端具有倾斜状的坡面,以便于车辆从地面挪动至支撑板2a上。因
此,在实际的倒车入库过程中,若车辆车速较低,车辆后轮将被坡面阻挡而停止,此时,需要驾驶员深踩油门,或者,驾驶员需要向远离停车位的方向行驶一段距离,随后再倒车以更大的速度进入坡面,进而增加了停车过程中的油耗。有调查表明,针对小区现有的机械式停车位,新手司机或车型较大的车主停车时间普遍大于5分钟。同时,在上述过程中,存在两个安全隐患:一、通常,机械式停车位的宽度比车轮间距稍大,在以较大速度倒车入库时,车轮与停车位的间距不易掌控,进而车轮容易碾压停车位边缘,产生损坏车轮轮毂等风险。二、当前轮抵达坡面后,车体大部分已经位于停车位中,此时,车体的尾部与停车位后侧间距较小,车辆仍需要较大的速度或深踩油门才能使前轮移动至支撑板2a,由于车速较大,并且车体的尾部与停车位后侧间距较小,需要驾驶员及时深踩刹车以实现车辆的制动,刹车减速过慢,车辆容易冲出停车位,刹车减速过急,将降低停车过程中的舒适程度。本发明在使用时,当检测到车辆倒车入库停车,并且托板2b
‑
1的总重量超过设定阈值(即,前轮或后轮压在托板2b
‑
1上)时,控制器2b
‑
4产生第一控制命令,使得托板2b
‑
1向上移动,进而使得托板2b
‑
1的上表面与支撑板2a的上表面位于同一高度上,随后只需轻踩油门,前轮或后轮即可移动至支撑板2a上,进而能够缩短停车时间、停车油耗并且减少安全隐患的发生。
34.实施例2
35.本实施例是对实施例1的进一步改进,重复的内容不再赘述。
36.优选的,控制器2b
‑
4可以设置于立体框架1上,控制器2b
‑
4上可以设置有用于操作的按钮,当使用者按钮进行操作时,便能够对第一驱动电机3a和第二驱动电机3b的工作状态进行调整,最终便能够实现支撑板2a位置的手动调整。例如,可以实现下层支撑板2a的左右移动,或者实现上层支撑板2a的上下移动。
37.优选的,本发明的智能车辆停放系统还包括设置于立体框架1上的检测器9。检测器9用于对车辆的状态的进行监测。车辆的状态至少包括入库状态和出库状态。入库状态是指车辆进入停车位进行存放的状态。出库状态是指车辆从停车位中取出开走的状态。例如,检测器9可以是红外测距仪,当红外测距仪检测到车辆靠近时,则判断车辆处于入库状态,或者当红外测距仪检测到车辆远离时,则判断车辆处于出库状态。或者,检测器9可以是图像采集器,当采集到车辆的车牌图像,并且未检测到使用者操作控制器2b
‑
4时,判定车辆处于入库状态,当采集到车辆的车牌图像,并且检测到使用者操作控制器2b
‑
4时,则判定车辆处于出库状态。检测器9检测到车辆处于入库状态时,控制器2b
‑
4控制升降机构2b以使其处于第一工作状态。在第一工作状态下,当托板2b
‑
1的总重量增大,并且持续时间达到设定时长后,托板2b
‑
1向上移动以使得高度差逐渐减小至零。
38.优选的,在检测器9检测到车辆处于出库状态的情况下,升降机构2b由第一工作状态切换为第二工作状态,使得高度差呈周期性增大和减小的状态。具体的,检测器9可以通信地耦合至控制器2b
‑
4,使得控制器2b
‑
4可以根据检测器9采集的数据生成第三控制命令。推杆电机2b
‑
2响应于第三控制命令以带动托板2b
‑
1周期性交替沿第一设定方向和第二设定方向移动,进而使得高度差呈现周期性增大和减小的状态。第一设定方向可以是竖直向上的方向,第二设定方向可以是竖直向下的方向。托板2b
‑
1上设置有反光标识10,反光标识10可以用于提醒驾驶员提前缴纳停车费。例如,反光标识10可以显示“请缴费”等字样以提醒驾驶员提前缴纳停车费。控制器2b
‑
4可以配置有显示屏以对收费二维码进行显示,最终,驾驶员通过扫描控制器2b
‑
4显示的收费二维码以进行缴费。当控制器2b
‑
4检测到驾驶者缴
费完成时,控制器2b
‑
4生成第四控制命令,推杆电机2b
‑
2响应于第四控制命令以带动托板2b
‑
1向下运动,在托板2b
‑
1移动至最低点时,推杆电机2b
‑
2停止工作,此时,托板2b
‑
1不会影响车辆的出库。现有的地下停车库中,车辆在未提前缴纳停车费的情况下也依旧能够驶出停车位,当达到地下停车库出口时,驾驶员需要通过例如是扫描二维码等方式完成缴费后,地下停车库的档杆方会抬起以便于车辆驶出。在上述过程中,存在两个问题:一、某些地下停车库出口通常具有一定的坡度,收费站设置在出口位置,当驾驶员停车缴费时,会影响后续车辆,进而导致出口出现拥堵。二、当出口拥堵后,大量车辆停放在坡面上并重新起步时,针对新手司机,容易出现溜车的风险,进而会发生前后车碰撞的事故,最终进一步加剧出口的拥堵。本技术在使用时,通过升降机构2b的阻挡以使得驾驶员提前完成缴费,进而能够避免在出口处发生碰撞事故以及拥堵。
39.优选的,智能车辆停放系统还包括设置于停车场出入口的车辆识别器11。车辆识别器11用于对需要进入停车场的车辆进行检测。在车辆识别器11检测到车辆入库需求的情况下,升降机构2c配置为保持第一工作状态,并且通过声和/或光的方式向外界传递支撑部2的使用状态信息和/或位置信息。车辆入库需求是指有车辆需要进入停车位进行停放。车辆识别器11可以是车牌扫描器,当车辆识别器11检测到车辆的车牌信息时,表明有新的车辆进入停车场,此时则判断具有车辆入库需求。车辆识别器11能够通信地耦合至控制器2b
‑
4。当车辆识别器11检测到新的车辆进入停车场时,车辆识别器11向具有空闲车位的停车位的控制器2b
‑
4发送触发信号,进而使得控制器2b
‑
4能够生成第五控制命令,最终升降机构2b响应于第五控制命令以实现车辆的停放引导功能。具体的,托板2b
‑
1上设置有闪烁灯12,闪烁灯12电连接至控制器2b
‑
4。控制器2b
‑
4生成的第五控制命令能够控制闪烁灯12进行闪烁,进而当驾驶员进入停车场内部时,直接查看灯光闪烁的位置即可确认该位置可以执行停车入库操作,最终起到车辆的停放引导。灯光闪烁则表明该车位处于空闲可使用状态,同时使用者根据灯光闪烁即可确认车位的位置信息。现有技术的停车场,车辆进入停车场后由于缺少引导标识,驾驶员需要驾驶车辆寻找可用的停车位,进而导致停车时间的增加。本技术能够为驾驶员提供易于识别的灯光闪烁,进而使得驾驶员能够直接识别可用的停车位,最终达到节省停车时间的目的。
40.实施例3
41.本实施例是对前述实施例的进一步改进,重复的内容不再赘述。
42.优选的,控制器2b
‑
4配置为按照如下方式工作:
43.s1,在检测器9判断车辆处于入库状态的情况下,检测器9向控制器2b
‑
4发送触发信号,控制器2b
‑
4响应于触发信号以向驾驶员发送提供停车时长数据的请求。
44.具体的,停车时长数据是指本次停车的总时长。控制器2b
‑
4可以配置有语音播放器以提醒驾驶员通过按钮输入停车时长。
45.s2,控制器2b
‑
4根据停车时长数据确定车辆的出库时间,并生成第六控制命令,其中,第六控制命令能够按照早于出库时间设定时长的方式提前发送至第一驱动电机3a或第二驱动电机3b以实现支撑板2a位置的调整,使得停放该车辆的支撑板2a能够提前由第一位置切换为第二位置。
46.具体的,当车辆于早10点进入停车位,其停车时长为3小时,则出库时间为下午1点。设定时长可以是10分钟,进而第六控制命令会在下午12点50分发送至第一驱动电机3a
或第二驱动电机3b,进而能够对支撑板2a的位置进行调整。例如,在停车位具有上下两层时,第六控制命令发送至第二驱动电机3b以使得位于上层的第二支撑板2a
‑
2下降,最终驾驶员能够直接将车取走,最终达到缩短取车时间的目的。第一位置为立体框架1的上层位置,在该位置上,车辆无法进行出库。第二位置为立体框架1的最下层位置,该位置与地面大致平齐,进而便于车辆的出库。
47.s3,在停放该车辆的支撑板2a按照早于出库时间设定时长的方式提前由第一位置切换为第二位置的情况下,升降机构2c由第一工作状态切换为第三工作状态。
48.具体的,当支撑板2a由第一位置切换为第二位置后,车辆便满足出库的条件。此时,升降机构2c调整为第三工作状态以避免对出库状态下的车辆造成阻挡。在第三工作状态下,托板2b
‑
1向下移动至与地面大致平齐的位置后则保持不动,此时,托板2b
‑
1不会对车辆造成阻挡,进而能够方便车辆的出库。
49.实施例4
50.本实施例是对实施例1的进一步改进,重复的内容不再赘述。
51.优选的,支撑板2a与地面之间设置有呈倾斜状的挡板13。挡板13的第一端连接至支撑板2a,挡板13的第二端与地面抵靠接触。挡板13的宽度大于托板2b
‑
1的宽度。挡板13上设置有贯通槽14。在托板2b
‑
1沿第一设定方向或第二设定方向移动的情况下,托板2b
‑
1能够进入贯通槽14以穿过挡板13。在使用时,当车辆倒车入库时,车轮首先停放在托板2b
‑
1上,此时,倾斜状的挡板13能够对后轮进行阻挡以避免其继续向后移动。随后托板2b
‑
1向上移动,带动后轮逐渐升高,当托板2b
‑
1与支撑板2a大致平行时,车辆即可继续倒车入库。在上述使用过程中,驾驶员将车辆档位调整至倒档后,松开刹车,使车辆在怠速状态下缓慢后退,当后轮接触到挡板13后,通过挡板13的阻挡可以限制车辆继续后退,此时,驾驶员不用踩刹车,随后,托板2b
‑
1逐渐上升,使得后轮与挡板13短暂分离,车辆将继续后退,当托板2b
‑
1上升至与支撑板2a平齐的位置后,车辆后轮将后退至支撑板2a上。即,在上述过程中,驾驶员一者不用踩刹车,进而降低了车辆入库的操作繁琐度,二者,在托板2b
‑
1持续上升的过程中,车辆将处于持续缓慢后退的状态,进而能够降低停车时长。
52.优选的,推杆电机2b
‑
2至少包括第一推杆电机15和第二推杆电机16,第一推杆电机15设置于托板2b
‑
1的沿车辆的出方向的第一侧。第二推杆电机16设置于托板2b
‑
1的沿出库方向的第二侧。车辆的出库方向是指车辆驶出停车位的方向。如图1所示,出库方向可以是水平向右的方向,第一侧可以是托板2b
‑
1的左侧,第二侧可以是托板2b
‑
1的右侧。在检测器9检测到车辆处于出库状态的情况下第一推杆电机15和第二推杆电机16配置为按照如下方式工作:在第一时间段内第一推杆电机15缩短以使得托板2b
‑
1呈第一侧低于第二侧的倾斜状态;在第二时间段内,第一推杆电机15和第二推杆电机16以相同的速度进行缩短,使得托板2b
‑
1与地面之间的距离逐渐减小;在第三时间段内,第一推杆电机15伸长,并且第二推杆电机16保持静止,使得托板2b
‑
1呈第一侧与第二侧各自的高度相同的水平状态。具体的,当车辆出库时,首先,第一推杆电机15和第二推杆电机16以相同的速度同时伸长,当达到最大伸长量后,托板2b
‑
1呈水平状态,随后,第一推杆电机15缩短,并且第二推杆机16保持固定不动,即可使得托板2b
‑
1呈第一侧低于第二侧的倾斜状态,此时,车辆前进,前轮会沿挡板13移动一段距离,并最终与托板2b
‑
1抵靠接触,该过程所消耗的时间定义为第一时间段。随后,第一推杆电机15和第二推杆电机16会同步缩短,使得车轮与地面之间的距离逐渐减
小,当车轮与地面之间的距离达到10cm(该距离可以根据实际使用情况进行调整)后,第一推杆电机15和第二推杆电机16保持固定不动,该过程所消耗的时间定义为第二时间段。最后,第一推杆电机15伸长即可使托板2b
‑
1呈水平状态,此时,托板2b
‑
1与地面保持大致平齐的状态以便于车辆出库,该过程所消耗的时间定义为第三时间段。在车辆的上述出库过程中,驾驶员只需将车辆的档位调整至前进档,松开刹车后,车辆在怠速状态下缓慢前进,当前轮与托板2b
‑
1抵靠接触后,前轮被阻挡而无法继续前进,随后托板2b
‑
1依次完成第一时间段、第二时间段和第三时间段的动作要求即可将车轮平稳的放置在地面上,进而车辆可以继续在怠速状态下前进。通过上述方式,一者,驾驶员无需在出库过程中踩刹车,进而能够降低出库的操作繁琐度。二者,车辆始终处于怠速状态,不会出现车速过快和高度差的存在而产生的车辆颠簸,进而能够提高汽车出库过程中的驾驶舒适度。
53.优选的,智能车辆停放系统配置有若干个立体框架1,在车辆识别器11检测到车辆入库需求的情况下,控制器2b4配置为:获取当前时下具有空闲的放置空间4的立体框架1以形成第一名单;获取当前时刻下具有车辆出库需求的立体框架1以形成第二名单;将第一名单和第二名单中重复的立体框架1删除以获取第三名单;向第三名单中的立体框架1所对应的升降机构2b发送控制命令,以使得该升降机构2b能够通过声和/或光的方式向外界传递支撑部2的使用状态信息和/或位置信息。通过上述方式,能够避免在同一立体框架1处同时进行车辆入库和车辆出库,进而避免车辆入库和车辆出库之间相互干扰而造成车辆碰撞或道路堵塞等问题的发生。
54.需要注意的是,上述具体实施例是示例性的,本领域技术人员可以在本发明公开内容的启发下想出各种解决方案,而这些解决方案也都属于本发明的公开范围并落入本发明的保护范围之内。本领域技术人员应该明白,本发明说明书及其附图均为说明性而并非构成对权利要求的限制。本发明的保护范围由权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

