1.本发明涉及偏振检测领域,更具体地,涉及一种烟雾粒子穆勒矩阵的偏振测量方法。
背景技术:
2.燃料燃烧、尾气排放,导致空气污染严重,出现严重的雾霾现象。雾霾的出现不仅对人们的身体健康产生极大的危害,还会影响交通安全,甚至导致气象变异。雾霾天气已经被公认为是灾害天气。因此对雾霾环境中烟雾粒子的研究已经受到关注。
3.偏振光在传输过程中因为烟雾粒子的散射作用,偏振状态会发生改变。这种偏振态的变化可以用穆勒矩阵来表示。偏振光发生散射的同时,也携带了粒子的信息。不同烟雾粒子的穆勒矩阵不同。穆勒矩阵的16个元素,包含了被测物质的强度特性、双向衰减特性、偏振特性以及退偏振和相位延迟特性。
4.传统的穆勒矩阵测量系统大多是利用偏振片、波片组成的起偏系统和检偏系统,采用不同的起偏、检偏组合,通过36次或16次独立的测量计算出目标穆勒矩阵,该系统对于测量稳定的液体环境具有可行性。但对于实时性要求较高的非稳定烟雾等气体介质,为了保证测试的准确性,目前最少的操作为4次独立调节,且每次调节后进行测试前需将烟雾调整为前一次测量的等效状态,如:现有已公开的用于烟雾介质散射特性穆勒矩阵图样的分振幅型测量方法,详见专利文献号cn104865224b。
5.对于烟雾调节的精度要求较高,增加测试难度,不仅操作复杂、耗费时间长,而且在实验过程中,每一次的调节以及记录的不同时性都会对探测结果的准确性产生影响,进而增加误差。
技术实现要素:
6.本发明的目的是:针对现有穆勒矩阵测量系统操作复杂、耗时长而且有误差的问题,为了研究烟雾粒子的穆勒矩阵,而提供了一种烟雾粒子穆勒矩阵的偏振测量方法。
7.本发明为实现上述目的采用的技术方案是:一种烟雾粒子穆勒矩阵的偏振测量方法,其特征在于,该方法基于的光学系统包括发射系统、分束起偏系统、起偏系统、烟雾粒子模拟系统、分光系统、检偏系统和计算机数据处理系统,具体所述方法包括如下步骤,且以下步骤顺序进行:
8.步骤一、前期准备:
9.①
将发射系统、烟雾粒子模拟系统、分光系统和检偏系统依次放置在光束传输方向的主光路上;分束起偏系统和起偏系统放置在同一波轮上;
10.其中,发射系统包括沿着光的传输方向依次布置的激光器、准直系统和滤光片;烟雾粒子模拟系统具有三个光射入窗口、三个光射出窗口;分光系统包括分光单元一、分光单元二和分光单元三,分光单元一、分光单元二和分光单元三分别放置在烟雾粒子模拟系统的三个出射光路上;检偏系统包括检偏单元一、检偏单元二、检偏单元三、检偏单元四、检偏
单元五和检偏单元六,检偏单元一、检偏单元二分别放置在分光单元一的反射光路和透射光路上;检偏单元三、检偏单元四分别放置在分光单元二的反射光路和透射光路上;检偏单元五、检偏单元六分别放置在分光单元三的反射光路和透射光路上;
11.②
将所述分束起偏系统配置为将其接收到的光束均匀分成能量相同且偏振态彼此不同的三路光束,且三路光束分别沿三个通道传输,三个通道相互平行,分别为第一通道、第二通道和第三通道,其中第二通道与分束起偏系统入射端口位于同一直线上;第一通道和第三通道对称设置在第二通道的两侧;第一通道的出射光为水平偏振光或垂直偏振光,第二通道的出射光为 45
°
方向的线偏振光或
‑
45
°
方向的线偏振光,第三通道的出射光为右旋偏振光或左旋偏振光;
12.③
将所述起偏系统配置为将其接收到的光束转换为水平偏振光、垂直偏振光、 45
°
方向的线偏振光或
‑
45
°
方向的线偏振光中的一种,且不同于所述分束起偏系统出射的三路光束的偏振态;
13.④
将所述检偏系统中的检偏单元一、检偏单元三和检偏单元五配置为检测右旋偏振光或左旋偏振光;检偏单元二、检偏单元四和检偏单元六配置为检测光经检偏方向为0
°
、45
°
、90
°
和135
°
后的光强;
14.步骤二、旋转波轮,将分束起偏系统置于光束传输方向的主光路上,并位于发射系统和烟雾粒子模拟系统之间;
15.步骤三、开启激光器,激光器发射的激光束经过准直系统入射到滤光片进行滤光,得到准直的平行激光束;
16.步骤四、将步骤三获得的平行激光束出射到分束起偏系统,光束经分束起偏系统分成三路,每路光束强度相同,且三路光束分别沿三个相互平行的通道传输,同时入射到烟雾粒子模拟系统;
17.步骤五、三路光束经烟雾粒子模拟系统入射到分光系统中,第一通道出射的光入射到分光单元一,第二通道出射的光入射到分光单元二,第三通道出射的光入射到分光单元三,分光单元一、分光单元二和分光单元三均将其接收到的一束光分成透射与反射的两束,且强度减半,得到六路出射光束;
18.步骤六、步骤五得到的六路出射光束分别入射到六个检偏单元;
19.步骤七、六个检偏单元同时探测到六路出射光束的光强,将光强信息传送给计算机数据处理系统,计算机数据处理系统进行处理,得到烟雾粒子穆勒矩阵的十二个元素;
20.步骤八、用波轮将分束起偏系统旋出,旋入起偏系统,使得入射到烟雾粒子模拟系统中的是水平偏振光、垂直偏振光、 45
°
方向的线偏振光或
‑
45
°
方向的线偏振光,且不重复于分束起偏系统中的一种,经烟雾粒子模拟系统出射的光入射到分光单元二,记录此种状态下的两路出射光束的光强,将光强信息传送给计算机数据处理系统,计算机数据处理系统进行处理,得到烟雾粒子穆勒矩阵的四个元素,从而获得烟雾粒子穆勒矩阵。
21.进一步,所述分束起偏系统包括偏振片b、偏振片c、偏振片d、1/4波片a、聚焦透镜和一维三通道分束器,一维三通道分束器放置在聚焦透镜焦点处,一维三通道分束器用于将来自发射系统的激光束均匀分成光束ⅰ、光束ⅱ和光束ⅲ三束光,所述三束光经过聚焦透镜后变成三束平行光,分别沿三个相互平行的通道进行传输,三个相互平行的通道分别为第一通道、第二通道和第三通道,其中第二通道与一维三通道分束器的入射端口位于同一
直线上;第一通道和第三通道对称设置在第二通道的两侧;偏振片b放置在第一通道的光路上,将偏振片b调节到水平方向或垂直方向;偏振片c放置在第二通道的光路上,将偏振片c调节到与水平成 45
°
方向或
‑
45
°
方向;偏振片d和1/4波片a放置在第三通道的光路上,且1/4波片a设置在偏振片d的光线出射侧,将偏振片d调节到水平方向并且将1/4波片a调节到与水平成 45
°
方向或
‑
45
°
方向。
22.进一步,所述检偏单元一包括沿着光的传输方向依次放置的1/4波片b、偏振片e和探测器a,将1/4波片b调节到与水平成 45
°
方向或
‑
45
°
方向,偏振片e调节到水平方向;检偏单元二包括微偏振探测器a;检偏单元三包括沿着光的传输方向依次放置的1/4波片c、偏振片f和探测器b,将1/4波片c调节到与水平成 45
°
方向或
‑
45
°
方向,偏振片f调节到水平方向;检偏单元四包括微偏振探测器b;检偏单元五包括沿着光的传输方向依次设置的1/4波片d、偏振片g和探测器c,将1/4波片d调节到与水平成 45
°
方向或
‑
45
°
方向,偏振片g调节到水平方向;检偏单元六包括微偏振探测器c。
23.通过上述设计方案,本发明可以带来如下有益效果:针对非稳定烟雾介质环境下穆勒矩阵测量过程中操作复杂、耗时等缺点,本发明提出的烟雾粒子穆勒矩阵的偏振测量方法是在该方法基于的光学系统中的发射系统后通过波轮加入起偏系统和分束起偏系统,当旋入分束起偏系统时,将发射系统发射的光束分为三个通道,具备三种偏振态同时起偏功能;在检偏单元中,每一个分束通道可同时检测四种偏振状态,达到三种偏振状态同时起偏同时检偏的效果,一次性完成十二组穆勒矩阵的测试。通过波轮快速旋出分束起偏系统,旋入起偏系统的操作,主光路只有一条通道,可用于检测第四种起偏光经烟雾介质后四种偏振态,完成另外四组穆勒矩阵的测试。整个测试过程只需对烟雾介质环境调节一次,无需重复调节,可避免烟雾介质环境反复调节所产生的误差问题。另外,波轮旋入一次系统操作代替传统烟雾介质穆勒矩阵测试中对偏振元件四次调节的操作,即可完成对十六组穆勒矩阵的测量,减少操作步骤,避免误差,提高实验准确度。
附图说明
24.此处所说明的附图用来提供对本发明的进一步理解,构成本技术的一部分,本发明示意性实施例及其说明用于理解本发明,并不构成本发明的不当限定,在附图中:
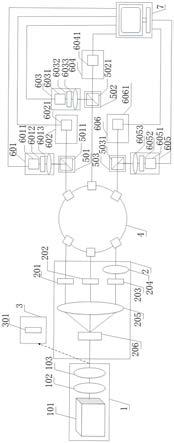
25.图1为烟雾粒子穆勒矩阵的偏振测量系统的结构示意图。
26.图中各标记如下:1
‑
发射系统、101
‑
激光器、102
‑
准直系统、103
‑
滤光片、2
‑
分束起偏系统、201
‑
偏振片b、202
‑
偏振片c、203
‑
偏振片d、204
‑
1/4波片a、205
‑
聚焦透镜、206
‑
一维三通道分束器、3
‑
起偏系统、301
‑
偏振片a、4
‑
烟雾粒子模拟系统、5
‑
分光系统、501
‑
分光单元一、5011
‑
非偏振分光棱镜a、502
‑
分光单元二、5021
‑
非偏振分光棱镜b、503
‑
分光单元三、5031
‑
非偏振分光棱镜c、6
‑
检偏系统、601
‑
检偏单元一、6011
‑
探测器a、6012
‑
偏振片e、6013
‑
1/4波片b、602
‑
检偏单元二、6021
‑
微偏振探测器a、603
‑
检偏单元三、6031
‑
探测器b、6032
‑
偏振片f、6033
‑
1/4波片c、604
‑
检偏单元四、6041
‑
微偏振探测器b、605
‑
检偏单元五、6051
‑
探测器c、6052
‑
偏振片g、6053
‑
1/4波片d、606
‑
检偏单元六、6061
‑
微偏振探测器c、7
‑
计算机数据处理系统。
具体实施方式
27.为使得本发明的目的、特征、优点能够更加的明显和易懂,下面结合本发明的实施例中的附图,对本发明中的技术方案进行清楚完整地描述。显然,本发明不受下述实施例的限制,可根据本发明的技术方案与实际情况来确定具体的实施方式。为了避免混淆本发明的实质,公知的方法、过程、流程、元件和电路并没有详细叙述。
28.如图1所示,烟雾粒子穆勒矩阵的偏振测量系统包括:发射系统1、分束起偏系统2、起偏系统3、烟雾粒子模拟系统4、分光系统5、检偏系统6和计算机数据处理系统7,发射系统1、烟雾粒子模拟系统4、分光系统5和检偏系统6依次设置在光束传输方向的主光路上,分束起偏系统2和起偏系统3设置在同一波轮上,波轮旋转到第一位置时,分束起偏系统2切换进入光束传输方向的主光路上,波轮旋转到第二位置时,起偏系统3切换进入光束传输方向的主光路上,且分束起偏系统2、起偏系统3位于发射系统1和烟雾粒子模拟系统4之间。
29.所述发射系统1包括沿着光的传输方向依次设置的激光器101、准直系统102和滤光片103,以水平方向为基准轴,本发明中发射系统1的作用是产生准直的平行激光束。
30.所述分束起偏系统2用于将所述发射系统1发射的激光束均匀分成能量相同且偏振态彼此不同的三路光束,分束起偏系统2包括偏振片b201、偏振片c202、偏振片d203、1/4波片a204、聚焦透镜205和一维三通道分束器206,一维三通道分束器206用于将一束入射激光分成三束激光,三束激光在同一平面内,分束后能量和波前一致性良好,同时不改变初始激光的特性,一维三通道分束器206选用深圳维尔克斯光电有限公司生产的一维三通道分束器,型号:ts
‑
272
‑
q
‑
y
‑
a,一维三通道分束器206放置在聚焦透镜205焦点处,一维三通道分束器206射出的三束光经过聚焦透镜205后变成三束平行光,即光束ⅰ、光束ⅱ和光束ⅲ,光束ⅰ、光束ⅱ和光束ⅲ分别沿三个相互平行的通道进行传输,三个相互平行的通道分别为第一通道、第二通道和第三通道,其中第二通道与一维三通道分束器206的入射端口位于同一直线上,第一通道和第三通道对称设置在第二通道的两侧;偏振片b201放置在第一通道的光路上,将偏振片b201调节到水平方向或垂直方向,偏振片b201用于将其接收到的光调整为水平偏振光或垂直偏振光;偏振片c202放置在第二通道的光路上,将偏振片c202调节到与水平成 45
°
方向或
‑
45
°
方向,偏振片c202用于将其接收到的光调整为 45
°
方向的线偏振光或
‑
45
°
方向的线偏振光;偏振片d203和1/4波片a204放置在第三通道的光路上,且1/4波片a204设置在偏振片d203的光线出射侧,将偏振片d203调节到水平方向并且将1/4波片a204调节到与水平成 45
°
方向或
‑
45
°
方向,可以得到右旋偏振光或左旋偏振光,分束起偏系统2作为一个整体,可以通过波轮在主光路中旋进旋出。
31.所述起偏系统3包括偏振片a301,将偏振片a301调节到水平方向或垂直方向,偏振片a301用于将其接收到的光调整为水平偏振光或垂直偏振光;将偏振片a301调节到与水平成 45
°
方向或
‑
45
°
方向可以得到 45
°
方向的线偏振光或
‑
45
°
方向的线偏振光,起偏系统3的作用是产生不同于分束起偏系统2三束出射光偏振态的偏振光,起偏系统3可以根据需要旋进主光路。
32.所述烟雾粒子模拟系统4包括烟雾粒子气体容器,烟雾粒子模拟系统4用来存放待测烟雾粒子,由于自然界中存在的地心引力作用,烟雾粒子不可避免的存在沉积、沉降现象。所以在烟雾粒子气体容器内部底面设有风扇,保证空气循环,防止沉降。将待测烟雾粒子搅拌均匀,趋于稳定时再进行测量,烟雾粒子模拟系统4设置有三个光射入窗口、三个光
射出窗口。
33.所述分光系统5包括分光单元一501、分光单元二502和分光单元三503,分光单元一501、分光单元二502和分光单元三503分别放置在烟雾粒子模拟系统4的三个出射光路上,分光单元一501包括非偏振分光棱镜a5011,分光单元二502包括非偏振分光棱镜b5021,分光单元三503包括非偏振分光棱镜c5301,且非偏振分光棱镜a5011、非偏振分光棱镜b5021和非偏振分光棱镜c5031的透射能量和反射能量之比均为1:1。
34.所述检偏系统6包括检偏单元一601、检偏单元二602、检偏单元三603、检偏单元四604、检偏单元五605和检偏单元六606,检偏单元一601、检偏单元二602分别设置在分光单元一501的反射光路和透射光路上;检偏单元三603、检偏单元四604分别设置在分光单元二502的反射光路和透射光路上;检偏单元五605、检偏单元六606分别设置在分光单元三503的反射光路和透射光路上;检偏单元一601包括沿着光的传输方向依次设置的1/4波片b6013、偏振片e6012和探测器a6011,将1/4波片b6013调节到与水平成 45
°
方向或
‑
45
°
方向,偏振片e6012调节到水平方向,探测器a6011检测右旋偏振光或左旋偏振光;检偏单元二602包括微偏振探测器a6021,由现有技术可知,微偏振探测器是一种特殊的偏振相机,可同时检测水平、垂直、 45
°
方向和135
°
方向的偏振光,在这四种探测结果中,本发明只需选择三种与起偏相对应的偏振探测结果用来计算穆勒矩阵,微偏振探测器a6021采用现有产品,lucid公司,型号:phx050s
‑
qc,微偏振探测器a6021探测到的光强分别为光经检偏方向为0
°
、45
°
、90
°
和135
°
后的光强图像(基于微偏振片阵列的偏振成像方法,将微偏振片阵列集成在感光芯片上,将探测器靶面平分为2
×
2个区域的方式,探测到的光强分别为光经检偏方向为0
°
、90
°
、45
°
和135
°
偏振片后的光强图像,从而实现,微偏振探测器a6021探测到的光强分别为光经检偏方向为0
°
、45
°
、90
°
和135
°
后的光强图像功能;);检偏单元三603包括沿着光的传输方向依次设置的1/4波片c6033、偏振片f6032和探测器b6031,将1/4波片c6033调节到与水平成 45
°
方向或
‑
45
°
方向,偏振片f6032调节到水平方向,探测器b6031检测右旋偏振光或左旋偏振光;检偏单元四604包括微偏振探测器b6041,微偏振探测器b6041采用现有产品,lucid公司,型号:phx050s
‑
qc,微偏振探测器b6041探测到的光强分别为光经检偏方向为0
°
、45
°
、90
°
和135
°
后的光强图像;检偏单元五605包括沿着光的传输方向依次设置的1/4波片d6053、偏振片g6052和探测器c6051,将1/4波片d6053调节到与水平成 45
°
方向或
‑
45
°
方向,偏振片g6052调节到水平方向,探测器e6051检测右旋偏振光或左旋偏振光;检偏单元六606包括微偏振探测器c6061,微偏振探测器c6061采用现有产品,lucid公司,型号:phx050s
‑
qc,微偏振探测器c6061探测到的光强分别为光经检偏方向为0
°
、45
°
、90
°
和135
°
后的光强图像;
35.所述计算机数据处理系统7分别与探测器a6011、微偏振探测器a6021、探测器b6031、微偏振探测器b6041、探测器c6051和微偏振探测器c6061通过数据线连接。
36.采用上述烟雾粒子穆勒矩阵的偏振测量系统对十六组穆勒矩阵测量的具体实现步骤如下:
37.步骤一、前期准备:
38.首先对分束起偏系统2中的偏振片b201、偏振片c202、偏振片d203和1/4波片a204进行调节,使得经过一维三通道分束器206和聚焦透镜205后的第一通道的出射光为水平偏振光、第二通道的出射光为 45
°
偏振光、第三通道的出射光为右旋偏振光;然后对所述1/4
波片b6013和偏振片e6012进行调节,使得检偏单元一601检测右旋偏振光,检偏单元二602检测水平偏振光、垂直偏振光和 45
°
方向的线偏振光,调节检偏单元三603和检偏单元五605使得二者与检偏单元一601保持一致;调节检偏单元四604和检偏单元六606使得二者与检偏单元二602保持一致,再对所述起偏系统3中的偏振片a301进行调节,使得进入烟雾粒子模拟系统4的入射光为垂直偏振光;
39.步骤二、打开激光器101,激光器101发射的光经过准直系统102,出射到滤光片103上进行滤光,得到准直平行光;
40.步骤三、将步骤二得到的准直平行光出射到分束起偏系统2中,光束经一维三通道分束器206和聚焦透镜205分成三路,每路光束强度相同,经过分束起偏系统2的三束出射光分别为水平偏振光、 45
°
方向的线偏振光和右旋偏振光;
41.步骤四、步骤三中出射光入射到烟雾粒子模拟系统4中,待测烟雾粒子在烟雾粒子气体容器中搅拌均匀;
42.步骤五、光束经烟雾粒子模拟系统4入射到分光系统5中,第一通道水平偏振光入射到分光单元一501中,第二通道 45
°
方向的线偏振光入射到分光单元二502中,第三通道右旋偏振光入射到分光单元三503中,三块非偏振分光棱镜均不改变偏振光的偏振态,只用于将一束光分成透射与反射的两束,且强度减半,所以将得到六路出射光;
43.步骤六、得到的六路光束同时入射到六个检偏单元,分别检测水平偏振光入射情况下的右旋圆偏光、水平偏振光、垂直偏振光以及 45
°
方向的线偏振光; 45
°
方向的线偏振光入射情况下的右旋圆偏光、水平偏振光、垂直偏振光以及 45
°
方向的线偏振光;右旋圆偏光入射情况下的右旋圆偏光、水平偏振光、垂直偏振光以及 45
°
方向的线偏振光;
44.步骤七、三个探测器和三个微偏振探测器同时探测到六路出射光束的光强,共得到十二组,将光强信息传送给计算机数据处理系统7,计算机数据处理系统7计算穆勒矩阵,得到烟雾粒子穆勒矩阵的十二个元素;
45.步骤八、步骤一调节完毕,无需再次调节,将分束起偏系统2通过波轮旋出,旋入起偏系统3,即入射到烟雾粒子模拟系统4中的是垂直偏振光,该垂直偏振光入射到分光单元二502中,检测垂直偏振光入射情况下的右旋圆偏光、水平偏振光、垂直偏振光以及 45
°
方向的线偏振光,记录此种状态下的探测器c6031和微偏振探测器d6041接收到光强图样,共四组,得到烟雾粒子穆勒矩阵的四个元素,进而计算出全部的十六组穆勒矩阵图样,从而获得烟雾粒子穆勒矩阵。
46.对十六组穆勒矩阵元素s
′
11
~s
′
44
进行计算,公式为:
47.s
′
11
=i
11
i
12
i
21
i
22
,s
′
12
=i
11
i
12
‑
i
21
‑
i
22
,
48.s
′
13
=2(i
31
i
32
)
‑
(i
11
i
12
i
21
i
22
),s
′
14
=2(i
41
i
42
)
‑
(i
11
i
12
i
21
i
22
),
49.s
′
21
=i
11
‑
i
12
i
21
‑
i
22
,s
′
22
=i
11
‑
i
12
‑
i
21
i
22
,
50.s
′
23
=2(i
31
‑
i
32
)
‑
(i
11
‑
i
12
i
21
‑
i
22
),s
′
24
=2(i
41
‑
i
42
)
‑
(i
11
‑
i
12
i
21
‑
i
22
)
51.s
′
31
=2(i
13
i
23
)
‑
(i
11
i
12
i
21
i
22
),s
′
32
=2(i
13
‑
i
23
)
‑
(i
11
i
12
‑
i
21
‑
i
22
),
52.s
′
33
=4i
33
‑
2(i
13
i
23
i
31
i
32
) (i
11
i
12
i
21
i
22
),
53.s
′
34
=4i
43
‑
2(i
13
i
23
i
41
i
42
) (i
11
i
12
i
21
i
22
)
54.s
′
41
=2(i
14
i
24
)
‑
(i
11
i
12
i
21
i
22
),s
′
42
=2(i
14
‑
i
24
)
‑
(i
11
i
12
‑
i
21
‑
i
22
),
55.s
′
43
=4i
34
‑
2(i
14
i
24
i
31
i
32
) (i
11
i
12
i
21
i
22
),
56.s
′
44
=4i
44
‑
2(i
14
i
24
i
41
i
42
) (i
11
i
12
i
21
i
22
)。
57.其中i为探测到的光强,下角标第一个数字代表起偏,第二个数字代表检偏,下角标1表示水平、2表示垂直、3表示 45
°
、4表示右旋。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

