1.本发明涉及对形成为长方形或正方形的搬送对象物进行搬运的工业用机器人。此外,本发明涉及所述工业用机器人的控制方法。
背景技术:
2.以往,已知一种对液晶显示屏用的玻璃基板等长方形的工件进行搬运的工业用机器人(例如,参照专利文献1)。专利文献1所记载的工业用机器人例如从收纳盒搬出工件,并将工件搬运至规定的处理装置。所述工业用机器人包括:手,所述手供工件装载;多关节臂,在所述多关节臂的前端侧能转动地连接有手;以及基台,在所述基台上能转动地连接有多关节臂的基端侧。此外,所述工业用机器人包括:臂驱动机构,所述臂驱动机构使多关节臂伸缩;转动机构,所述转动机构使基台转动;以及移动机构,所述移动机构使基台沿水平方向移动。臂驱动机构以使手在朝向一定方向的状态下相对于基台直线移动的方式使臂伸缩。
3.在专利文献1所记载的工业用机器人中,手包括供工件载置的两根载置部。在两根载置部的前端侧的上表面安装有对准传感器。对准传感器是反射型的光学式传感器。若将臂伸缩时直线移动的手的移动方向设为前后方向,则对准传感器从下侧对收纳于收纳盒的工件的前后方向的一个端面进行检测。
4.在专利文献1所记载的工业用机器人中,在将收纳于收纳盒的工件装载于手之前,通过对准传感器对收纳于收纳盒的工件的前后方向的一个端面进行检测,并且基于对准传感器的检测结果确定收纳盒所收纳的工件在前后方向上的位置和朝向(水平面内的倾斜)。此外,基于确定的工件在前后方向上的位置和朝向对预先教示的手在前后方向上的位置和朝向进行修正,并将工件装载于前后方向的位置和朝向得到修正后的手。现有技术文献专利文献
5.专利文献1:日本专利特开2006
‑
272526号公报
技术实现要素:
发明所要解决的技术问题
6.近年来,在长方形或正方形的大型面板上并排大量的芯片而一并制造多个半导体封装件的施工方法(面板级封装(plp))开始普及,并且在使用plp的半导体封装件的制造线中开始使用工业用机器人。plp包括通过树脂对载置有大量芯片的面板的上表面进行涂敷(密封)的工序等,在使用plp的半导体封装件的制造线中处理的面板容易产生较大的翘曲。
7.此外,在专利文献1所记载的工业用机器人中,为了将放置于收纳盒的工件在前后方向和左右方向上的位置(即水平方向的位置)和朝向修正为适当的位置和朝向之后将工件放置于处理装置,在进行将工件从收纳盒搬出并将工件搬入到处理装置的动作时,有时对手在水平方向上的位置和朝向进行修正。在这种情况下,例如,在基台上安装有用于对从
收纳盒搬出的工件在左右方向上的位置进行检测的传感器。
8.此外,在这种情况下,为了修正放置于收纳盒的工件在前后方向上的位置和朝向,在将放置于收纳盒的工件装载于手之前,基于对准传感器的检测结果对手在前后方向上的位置和朝向进行修正,之后,将工件装载于修正后的手,并且,为了对工件在左右方向上的位置进行修正,基于安装于基台的传感器的检测结果,在将装载于手的工件搬入到处理装置并将其放置时对手在左右方向上的位置进行修正。
9.本技术发明人正在研究如下技术:在专利文献1所记载的工业用机器人中,例如在进行将像使用plp的半导体封装件的制造线中处理的面板那样产生较大翘曲的搬运对象物从收纳盒搬出并搬入到处理装置的动作时,为了在对放置于收纳盒的搬运对象物在水平方向上的位置和朝向进行修正之后将搬运对象物放置于处理装置,对手在水平方向上的位置和朝向进行修正。
10.然而,通过本技术发明人的研究发现,在如专利文献1所记载的工业用机器人那样安装于手的载置部的上表面的对准传感器为反射型的光学式传感器的情况下,当搬运对象物产生较大的翘曲时,对准传感器与搬运对象物的端面(前后方向的端面)的上下方向的距离将会变得不稳定,从对准传感器射出并被搬运对象物的端面以外的部位反射后的光可能会最先入射到对准传感器。即,通过本技术发明人的研究发现,在对准传感器为反射型的光学式传感器的情况下,当搬运对象物产生较大的翘曲时,将产生无法通过对准传感器适当地检测搬运对象物的前后方向的端面的情况。
11.若无法通过对准传感器适当地检测搬运对象物的前后方向的端面,则在将放置于收纳盒的搬运对象物装载于手之前,无法基于对准传感器的检测结果适当地修正手在前后方向上的位置和朝向。因此,无法在适当地修正放置于收纳盒的搬运对象物在水平方向上的位置和朝向之后将搬运对象物放置于处理装置。
12.因此,本发明的技术问题在于提供一种将搬运对象物从规定的接受部搬出并将搬运对象物搬入到规定的交接部的工业用机器人,即使搬运对象物产生较大的翘曲,为了在适当地修正放置于接受部的搬运对象物在水平方向上的位置和朝向之后将搬运对象物放置于交接部,也能适当地修正手在水平方向上的位置和朝向。
13.此外,本发明的技术问题在于提供一种将搬运对象物从规定的接受部搬出并将搬运对象物搬入到规定的交接部的工业用机器人的控制方法,即使搬运对象物产生较大的翘曲,为了在适当地修正放置于接受部的搬运对象物在水平方向上的位置和朝向之后将搬运对象物放置于交接部,也能适当地修正手在水平方向上的位置和朝向。解决技术问题所采用的技术方案
14.为了解决上述技术问题,本发明提供一种工业用机器人,对形成为长方形或正方形的搬运对象物进行搬运,包括:手,所述手供搬运对象物装载;臂,在所述臂的前端侧能转动地连接有手,并且所述臂沿水平方向伸缩;主体部,在所述主体部能转动地连接有臂的基端侧;光学式的检测机构,所述检测机构安装于主体部;以及控制部,所述控制部对工业用机器人进行控制,并且,若将在臂伸出的状态下将放置于规定的接受部的搬运对象物装载于手而接受所述搬运对象物时的手的位置设为接受位置,在臂伸出的状态下将装载于手的搬运对象物交接到规定的交接部时的手的位置设为交接位置,则进行臂以使在接受位置接受到搬运对象物的手靠近主体部的方式收缩时的动作、即第一动作和在第一动作之后、臂
伸出以使装载有搬运对象物的手移动到交接位置时的动作、即第二动作,手在工业用机器人进行第一动作时在朝向一定方向的状态下相对于主体部直线移动,检测机构是具有受光部和发光部的透射型的检测机构,其中,所述受光部由线传感器或区域传感器构成,所述发光部以在上下方向上与受光部之间隔开规定间隔的状态与受光部相对配置,若将工业用机器人进行第一动作时的手的移动方向设为前后方向,将与前后方向和上下方向正交的方向设为左右方向,则在工业用机器人进行第一动作时,搬运对象物的左右方向的一端面穿过受光部与发光部之间,控制部获取第一位置数据、第二位置数据和第三位置数据,其中,所述第一位置数据是在工业用机器人进行第一动作时,在检测机构检测到搬运对象物时的手在前后方向上的位置的数据,所述第二位置数据是在检测机构检测到搬运对象物之后,在手移动到规定的第一测量位置时由检测机构检测的搬运对象物的左右方向的一端面在左右方向上的位置的数据,所述第三位置数据是在经过第一测量位置后的手移动到规定的第二测量位置时由检测机构检测的搬运对象物的左右方向的一端面在左右方向上的位置的数据,在工业用机器人进行第二动作时,基于第一位置数据、第二位置数据和第三位置数据修正到达交接位置时的手在水平方向上的位置和朝向。
15.此外,为了解决上述技术问题,本发明提供一种工业用机器人的控制方法,所述工业用机器人包括:手,所述手供形成为长方形或正方形的搬运对象物装载;臂,在所述臂的前端侧能转动地连接有手,并且所述臂沿水平方向伸缩;主体部,在所述主体部能转动地连接有臂的基端侧;以及光学式的检测机构,所述检测机构安装于主体部,并且,若将在臂伸出的状态下将放置于规定的接受部的搬运对象物装载于手而接受所述搬运对象物时的手的位置设为接受位置,在臂伸出的状态下将装载于手的搬运对象物交接到规定的交接部时的手的位置设为交接位置,则进行臂以使在接受位置接受到搬运对象物的手靠近主体部的方式收缩时的动作、即第一动作和在第一动作之后、臂伸出以使装载有搬运对象物的手移动到交接位置时的动作、即第二动作,手在进行第一动作时在朝向一定方向的状态下相对于主体部直线移动,检测机构是具有受光部和发光部的透射型的检测机构,其中,所述受光部由线传感器或区域传感器构成,所述发光部以在上下方向上与受光部之间隔开规定间隔的状态与受光部相对配置,若将进行第一动作时的手的移动方向设为前后方向,将与前后方向和上下方向正交的方向设为左右方向,则在进行第一动作时搬运对象物的左右方向的一端面穿过受光部与所述发光部之间,获取第一位置数据、第二位置数据和第三位置数据,其中,所述第一位置数据是在进行第一动作时,在检测机构检测到搬运对象物时的手在前后方向上的位置的数据,所述第二位置数据是在检测机构检测到搬运对象物之后,在手移动到规定的第一测量位置时由检测机构检测的搬运对象物的左右方向的一端面在左右方向上的位置的数据,所述第三位置数据是在经过第一测量位置后的手移动到规定的第二测量位置时由检测机构检测的搬运对象物的左右方向的一端面在左右方向上的位置的数据,在进行第二动作时,基于第一位置数据、第二位置数据和第三位置数据修正到达交接位置时的手在水平方向上的位置和朝向。
16.在本发明中,获取第一位置数据、第二位置数据和第三位置数据,其中,所述第一位置数据是在工业用机器人进行第一动作时,在检测机构检测到搬运对象物时的手在前后方向上的位置的数据,所述第二位置数据是在检测机构检测到搬运对象物之后,在手移动到第一测量位置时由检测机构检测的搬运对象物的左右方向的一端面在左右方向上的位
置的数据,所述第三位置数据是在经过第一测量位置后的手移动到第二测量位置时由检测机构检测的搬运对象物的左右方向的一端面在左右方向上的位置的数据,检测机构是具有受光部和与受光部相对配置的发光部的透射型的检测机构。
17.因此,在本发明中,即使搬运对象物产生较大的翘曲,也能通过检测机构适当地获取第一位置数据、第二位置数据和第三位置数据。因此,在本发明中,能基于适当的第一位置数据、第二位置数据和第三位置数据,适当地确定保持着放置于接受部的状态(位置和朝向)装载于手的搬运对象物在水平方向上的位置和朝向。
18.此外,在本发明中,在机器人进行第二动作时,基于第一位置数据、第二位置数据和第三位置数据修正到达交接位置时的手在水平方向上的位置和朝向,因此,即使搬运对象物产生较大的翘曲,也能基于适当确定后的搬运对象物在水平方向上的位置和朝向适当地修正到达交接位置时的手在水平方向上的位置和朝向。
19.如此,在本发明中,即使搬运对象物产生较大的翘曲,也能适当地确定保持着放置于接受部的状态装载于手的搬运对象物在水平方向上的位置和朝向,并且能基于适当确定后的搬运对象物在水平方向上的位置和朝向适当地修正到达交接位置时的手在水平方向上的位置和朝向。因此,在本发明中,即使搬运对象物产生较大的翘曲,为了在适当地修正放置于接受部的搬运对象物在水平方向上的位置和朝向之后将搬运对象物放置于交接部,也能适当地修正手在水平方向上的位置和朝向。
20.在本发明中,工业用机器人例如包括第一手和第二手这两个手作为手,并且包括:作为供第一手连接的臂的第一臂;作为供第二手连接的臂的第二臂;供第一臂和第二臂连接的一个主体部;作为对装载于第一手的搬运对象物进行检测的检测机构的第一检测机构;以及作为对装载于第二手的搬运对象物进行检测的检测机构的第二检测机构,装载于第一手的搬运对象物与装载于第二手的搬运对象物在上下方向上错开,第一检测机构和第二检测机构以在上下方向上重叠的状态安装于主体部。
21.在这种情况下,分开设置有第一检测机构和第二检测机构,其中,所述第一检测机构对装载于第一手的搬运对象物进行检测,所述第二检测机构对装载于第二手的搬运对象物进行检测,因此,即使第二臂在搬运对象物已装载于第二手的状态下收缩,控制部也能适当地获取第一位置数据、第二位置数据和第三位置数据,其中,所述第一位置数据是第一检测机构检测到装载于第一手的搬运对象物时的第一手在前后方向上的位置的数据,所述第二位置数据是第一手移动到第一测量位置时由第一检测机构检测的搬运对象物的左右方向的一端面在左右方向上的位置的数据,所述第三位置数据是在第一手移动到第二测量位置时由第一检测机构检测的搬运对象物的左右方向的一端面在左右方向上的位置的数据。
22.此外,即使在搬运对象物已装载于第一手的状态下第一臂收缩,控制部也能获取第一位置数据、第二位置数据和第三位置数据,其中,所述第一位置数据是在第二检测机构检测到装载于第二手的搬运对象物时的第二手在前后方向上的位置的数据,第二位置数据是在第二手移动到第一测量位置时由第二检测机构检测的搬运对象物的左右方向的一端面在左右方向上的位置的数据,所述第三位置数据是在第二手移动到第二测量位置时由第二检测机构检测的搬运对象物的左右方向的一端面在左右方向上的位置的数据。
23.在本发明中,工业用机器人例如包括:臂驱动机构,所述臂驱动机构以使手在朝向一定方向的状态下相对于主体部直线移动的方式使臂伸缩;转动机构,所述转动机构使主
体部转动;以及水平移动机构,所述水平移动机构使主体部沿左右方向移动,控制部在工业用机器人进行第二动作时,基于第一位置数据、第二位置数据和第三位置数据控制臂驱动机构、转动机构和水平移动机构,并修正到达交接位置时的手在水平方向上的位置和朝向。发明效果
24.如上所述,在本发明中,在将搬运对象物从规定的接受部搬出并将搬运对象物搬入到规定的交接部的工业用机器人中,即使搬运对象物产生较大的翘曲,为了在适当地修正放置于接受部的搬运对象物在水平方向上的位置和朝向之后将搬运对象物放置于交接部,也能适当地修正手在水平方向上的位置和朝向。
附图说明
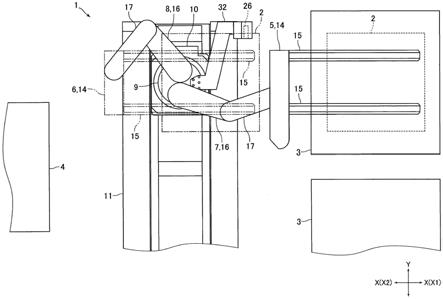
25.图1是本发明实施方式的工业用机器人的俯视图。图2是图1所示的工业用机器人的后视图。图3是用于说明图1所示的工业用机器人的结构的框图。图4(a)、图4(b)和图4(c)是用于说明图1所示的工业用机器人的动作的俯视图。图5是本发明另一实施方式的工业用机器人的俯视图。图6是图5所示的工业用机器人的侧视图。图7是本发明的不同实施方式的工业用机器人的后视图。(符号说明)1
ꢀꢀ
机器人(工业用机器人)2
ꢀꢀ
搬运对象物3
ꢀꢀ
收纳盒(接受部)4
ꢀꢀ
处理装置(交接部)5
ꢀꢀ
手(第一手)6
ꢀꢀ
手(第二手)7
ꢀꢀ
臂(第一臂)8
ꢀꢀ
臂(第二臂)9
ꢀꢀ
主体部20、21
ꢀꢀ
臂驱动机构22
ꢀꢀ
转动机构24
ꢀꢀ
水平转动机构25
ꢀꢀ
控制部26
ꢀꢀ
检测机构(第一检测机构)27
ꢀꢀ
检测机构(第二检测机构)28
ꢀꢀ
对准机构30
ꢀꢀ
发光部31
ꢀꢀ
受光部x
ꢀꢀ
前后方向y
ꢀꢀ
左右方向。
具体实施方式
26.以下,参照附图对本发明的实施方式进行说明。
27.(工业用机器人的结构)图1是本发明实施方式的工业用机器人1的俯视图。图2是图1所示的工业用机器人1的后视图。图3是用于说明图1所示的工业用机器人1的结构的框图。
28.本实施方式的工业用机器人1(以下,称为“机器人1”)是用于搬运规定的搬运对象物2的水平多关节型的机器人。本实施方式的搬运对象物2是在使用plp的半导体封装件的制造线中处理的大型的面板。搬运对象物2形成为长方形或正方形的平板状。机器人1例如将搬运对象物2从供多块搬运对象物2收纳的收纳盒3搬运至对搬运对象物2进行规定处理的处理装置4。
29.即,机器人1例如将搬运对象物2从收纳盒3搬出,并且将从收纳盒3搬出的搬运对象物2搬入到处理装置4。在收纳盒3内以在上下方向上隔开间隔的状态重叠的方式收纳有多块搬运对象物2。在本实施方式中,收纳盒3是机器人1接受搬运对象物2的接受部,处理装置4是机器人1交接搬运对象物2的交接部。
30.另外,机器人1也可以将搬运对象物2从处理装置4搬运至收纳盒3。即,机器人1也可以将搬运对象物2从处理装置4搬出,并且将从处理装置4搬出的搬运对象物2搬入到收纳盒3。在这种情况下,处理装置4是机器人1接受搬运对象物2的接受部,收纳盒3是机器人1交接搬运对象物2的交接部。
31.机器人1包括:两个手5、6,所述两个手5、6供搬运对象物2装载;臂7,在所述臂7的前端侧能转动地连接有手5;臂8,在所述臂8的前端侧连接有手6;主体部9,在所述主体部9能转动地连接有臂7、8的基端侧;壳体10,所述壳体10供主体部9的下侧部分收纳;以及基座11,所述基座11将主体部9和壳体10支承成能沿水平方向移动。在本实施方式中,手5是第一手,手6是第二手。此外,在本实施方式中,臂7是第一臂,臂8是第二臂。
32.手5、6包括:手基部14,所述手基部14能转动地连接于臂7、8的前端侧;以及直线状的多个叉部15,多个所述叉部15的上面侧供搬运对象物2载置。本实施方式的手5、6包括两根叉部15。两根叉部15从手基部14朝水平方向的相同方向突出。此外,两根叉部15配置成相互平行。手5的叉部15和手6的叉部15朝相同方向突出。此外,手5的叉部15和手6的叉部15在上下方向上错开。即,装载于手5的搬运对象物2和装载于手6的搬运对象物2在上下方向上错开。在本实施方式中,手5的叉部15配置于比手6的叉部15靠上侧的位置。
33.臂7、8是在水平方向上伸缩的多关节臂。臂7、8由第一臂部16和第二臂部17这两个臂部构成。第一臂部16的基端侧能转动地连接于主体部9。在第一臂部16的前端侧能转动地连接有第二臂部17的基端侧。在第二臂部17的前端侧能转动地连接有手5、6。
34.第一臂部16配置于比主体部9靠上侧的位置。第二臂部17配置于比第一臂部16靠上侧的位置。手5、6配置于比第二臂部17靠上侧的位置。臂7的第一臂部16的基端侧和臂8的第一臂部16的基端侧以在水平方向上互为相邻的状态连接于主体部9。此外,臂7和臂8以互为相邻的状态配置,并配置于上下方向上的相同位置。
35.在水平方向上,第一臂部16相对于主体部9的转动中心与第二臂部17相对于第一臂部16的转动中心的距离等于第二臂部17相对于第一臂部16的转动中心与手5、6相对于第二臂部17的转动中心的距离。臂7、8能在臂7、8以使手5、6的前端(叉部15的前端)远离主体
部9的方式伸出的位置与臂7、8以使手5、6的前端靠近主体部9的方式收缩的位置之间沿水平方向伸缩。在臂7、8的伸缩量相等时,手5的叉部15与手6的叉部15在上下方向上重叠。此外,此时,从上下方向观察时,臂7和臂8配置成线对称。
36.主体部9能以上下方向为转动的轴向相对于壳体10转动。此外,主体部9能相对于壳体10升降。壳体10能相对于基座11沿水平方向直线移动。在以下说明中,将壳体10相对于基座11的移动方向(图1等的y方向)设为“左右方向”,将与左右方向和上下方向正交的图1等的x方向设为“前后方向”。此外,将前后方向的一侧、即图1等的x1方向侧设为“前”侧,将其相反侧、即图1等的x2方向侧设为“后”侧。
37.在本实施方式中,例如在左右方向上排列有多个收纳盒3。此外,例如,多个收纳盒3配置于机器人1在前后方向上的一侧,处理装置4配置于机器人1在前后方向上的另一侧。例如,多个收纳盒3配置于机器人1的前侧,处理装置4配置于机器人1的后侧。此外,在收纳盒3和处理装置4中,装载于手5、6的搬运对象物2的端面与前后方向或左右方向大致平行。
38.此外,机器人1包括:臂驱动机构20,所述臂驱动机构20使臂7伸缩;臂驱动机构21,所述臂驱动机构21使臂8伸缩;转动机构22,所述转动机构22使主体部9转动;升降机构23,所述升降机构23使主体部9升降;水平移动机构24,所述水平移动机构24使主体部9与壳体10一起沿水平方向移动;以及控制部25,所述控制部25对机器人1进行控制。此外,机器人1包括:检测机构26,所述检测机构26用于对装载于手5的搬运对象物2进行检测;以及检测机构27,所述检测机构27用于对装载于手6的搬运对象物2进行检测。在本实施方式中,检测机构26是第一检测机构,检测机构27是第二检测机构。
39.臂驱动机构20包括:作为驱动源的马达;以及动力传递机构,所述动力传递机构将马达的动力传递至臂7和手5。臂驱动机构20以使手5在朝向一定方向的状态下相对于主体部9直线移动的方式使臂7伸缩。臂驱动机构21与臂驱动机构20相同,包括:作为驱动源的马达;以及动力传递机构,所述动力传递机构将马达的动力传递至臂8和手6。臂驱动机构21以使手6在朝向一定方向的状态下相对于主体部9直线移动的方式使臂8伸缩。臂驱动机构20、21与控制部25电连接。具体而言,臂驱动机构20、21的马达等与控制部25电连接。
40.转动机构22以上下方向为转动的轴向使主体部9相对于壳体10转动。即,转动机构22以上下方向为转动的轴向使臂7、8与主体部9一起转动。转动机构22包括:作为驱动源的马达;以及动力传递机构,所述动力传递机构将马达的动力传递至主体部9。转动机构22收纳于壳体10。转动机构22与控制部25电连接。具体而言,转动机构22的马达等与控制部25电连接。
41.升降机构23使主体部9相对于壳体10升降。即,升降机构23使臂7、8与主体部9一起升降。此外,升降机构23使转动机构22与主体部9一起升降。升降机构23收纳于壳体10。升降机构23包括:作为驱动源的马达;以及动力传递机构,所述动力传递机构将马达的动力传递至主体部9。升降机构23与控制部25电连接。具体而言,转动机构23的马达等与控制部25电连接。
42.水平移动机构24使壳体10相对于基座11沿左右方向直线移动。即,水平移动机构24使主体部9及臂7、8与壳体10一起沿左右方向直线移动。水平移动机构24包括:作为驱动源的马达;以及动力传递机构,所述动力传递机构将马达的动力传递至壳体10。水平移动机构24与控制部25电连接。具体而言,水平移动机构24的马达等与控制部25电连接。
43.检测机构26、27是具有发光部30和受光部31的光学式的检测机构。此外,检测机构26、27是透射型的检测机构。发光部30以在上下方向上与受光部31之间隔开规定间隔的状态与受光部31相对配置。本实施方式的受光部31是线传感器。在受光部31中,多个受光元件在左右方向上排列成一列。另外,从发光部30射出的光的光轴既可以与上下方向平行,也可以相对于上下方向稍稍倾斜。
44.检测机构26、27安装于主体部9。具体而言,在固定于主体部9的传感器固定构件32上固定有检测机构26、27,检测机构26、27经由传感器固定构件32安装于主体部9。此外,检测机构26和检测机构27以在上下方向上重叠的状态经由传感器固定构件32安装于主体部9。在本实施方式中,检测机构26配置于检测机构27的正上方。检测机构26、27与主体部9一起相对于壳体10转动,同时升降。此外,检测机构26、27与主体部9一起沿左右方向移动。检测机构26、27与控制部25电连接。
45.如上所述,机器人1将搬运对象物2从收纳盒3搬运至处理装置4。此外,如上所述,臂7、8能在臂7、8以使手5、6的前端远离主体部9的方式伸出的位置与臂7、8以使手5、6的前端靠近主体部9的方式收缩的位置之间沿水平方向伸缩。在本实施方式中,在机器人1从收纳盒3接受搬运对象物2时以及机器人1将搬运对象物2交接到处理装置4时,臂7、8变成伸出的状态。
46.若将在臂7伸出的状态下将放置于收纳盒3的搬运对象物2装载于手5而接受该搬运对象物2时的手5的位置(参照图1)设为接受位置5a,在臂7伸出的状态下将装载于手5的搬运对象物2交接到处理装置4时的手5的位置设为交接位置5b,则机器人1进行臂7以使在接受位置5a接受到搬运对象物2的手5靠近主体部9的方式收缩时的动作、即第一动作m11和在第一动作m11之后、臂7伸出直至装载有搬运对象物2的手5移动到交接位置5b时的动作、即第二动作m12。在第一动作m11结束后的状态下,包括装载于手5的搬运对象物2、手5和臂7的主体部9的转动半径(回旋半径)最小。
47.同样,若将在臂8伸出的状态下将放置于收纳盒3的搬运对象物2装载于手6而接受该搬运对象物2时的手6的位置设为接受位置6a,在臂8伸出的状态下将装载于手6的搬运对象物2交接到处理装置4时的手6的位置设为交接位置6b,则机器人1进行臂8以使在接受位置6a接受搬运对象物2的手6靠近主体部9的方式收缩时的动作、即第一动作m21和在第一动作m21之后、臂8伸出直至装载有搬运对象物2的手6移动到交接位置6b时的动作、即第二动作m22。在第一动作m21结束后的状态下,包括装载于手6的搬运对象物2、手6和臂8的主体部9的转动半径最小。
48.如上所述,臂驱动机构20以使手5在朝向一定方向的状态下相对于主体部9直线移动的方式使臂7伸缩,臂驱动机构21以使手6在朝向一定方向的状态下相对于主体部9直线移动的方式使臂8伸缩。即,手5在机器人1进行第一动作m11时以朝向一定方向的状态相对于主体部9直线移动,手6在机器人1进行第一动作m21时以朝向一定方向的状态相对于主体部9直线移动。此外,手5在机器人1进行第二动作m12时以朝向一定方向的状态相对于主体部9直线移动,手6在机器人1进行第二动作m22时以朝向一定方向的状态相对于主体部9直线移动。
49.在本实施方式中,收纳盒3配置于机器人1的前侧,且处理装置4配置于机器人1的后侧,因此,手5在机器人1进行第一动作m11时和机器人1进行第二动作m12时沿前后方向直
线移动。此外,手6在机器人1进行第一动作m21时和机器人1进行第二动作m22时沿前后方向直线移动。
50.具体而言,手5在机器人1进行第一动作m11时在叉部15的前端朝向前侧的状态下朝后侧直线移动,在机器人1进行第二动作m12时在叉部15的前端朝向后侧的状态下朝后侧直线移动。此外,手6在机器人1进行第一动作m21时在叉部15的前端朝向前侧的状态下朝后侧直线移动,在机器人1进行第二动作m22时在叉部15的前端朝向后侧的状态下朝后侧直线移动。
51.在机器人1进行第一动作m11时,装载于手5的搬运对象物2的左右方向的一端面穿过检测机构26的发光部30与检测机构26的受光部31之间。即,检测机构26配置于如下位置,即在机器人1进行第一动作m11时,装载于手5的搬运对象物2的左右方向的一端面穿过检测机构26的发光部30与检测机构26的受光部31之间的位置。此外,检测机构26配置于比配置于接受位置5a的手5所装载的搬运对象物2的后端靠后侧的位置。此外,在机器人1进行第二动作m12时,装载于手5的搬运对象物2的左右方向的一端面也穿过检测机构26的发光部30与检测机构26的受光部31之间。
52.同样,在机器人1进行第一动作m21时,装载于手6的搬运对象物2的左右方向的一端面穿过检测机构27的发光部30与检测机构27的受光部31之间。即,检测机构27配置于如下位置,即在机器人1进行第一动作m21时,装载于手6的搬运对象物2的左右方向的一端面穿过检测机构27的发光部30与检测机构27的受光部31之间的位置。此外,检测机构27配置于比配置于接受位置6a的手6所装载的搬运对象物2的后端靠后侧的位置。此外,在机器人1进行第二动作m22时,装载于手6的搬运对象物2的左右方向的一端面也穿过检测机构27的发光部30与检测机构27的受光部31之间。
53.如上所述,受光部31是多个受光元件在左右方向上排列成一列的线传感器,因此,能通过检测机构26对装载于手5的搬运对象物2的左右方向的一端面在左右方向上的位置进行检测。同样,能通过检测机构27对装载于手6的搬运对象物2的左右方向的一端面在左右方向上的位置进行检测。
54.另外,机器人1在第一动作m11与第二动作m12之间进行使主体部9转动的转动动作。此时,臂8也收缩。此外,机器人1在第一动作m21与第二动作m22之间进行使主体部9转动的转动动作。此时,臂7也收缩。此外,机器人1根据需要在第一动作m11与第二动作m12之间以及第一动作m21与第二动作m22之间进行主体部9的升降动作、主体部9朝左右方方向的移动动作。此外,机器人1根据需要在第一动作m11、m21时进行主体部9的升降动作、主体部9朝左右方向的移动动作,或者在第二动作m12、m22时进行主体部9的升降动作、主体部9朝左右方向的移动动作。
55.(工业用机器人的控制方法)图4(a)、图4(b)和图4(c)是用于说明图1所示的机器人1的动作的俯视图。另外,在图4(a)、图4(b)和图4(c)中省略手6等的图示。
56.控制部25获取第一位置数据、第二位置数据和第三位置数据,其中,所述第一位置数据是在机器人1进行第一动作m11时,在检测机构26检测到搬运对象物2时(具体而言,检测机构26检测到装载于手5的搬运对象物2的后端时(即,检测机构26最初检测到装载于手5的搬运对象物2时),参照图4(a))的手5在前后方向上的位置的数据,所述第二位置数据是
在检测机构26检测到搬运对象物2之后,在手5移动到规定的第一测量位置时(参照图4(b))由检测机构26检测的搬运对象物2的左右方向的一端面在左右方向上的位置的数据,所述第三位置数据是在经过第一测量位置后的手5移动到规定的第二测量位置时(参照图4(c))由检测机构26检测的搬运对象物2的左右方向的一端面在左右方向上的位置的数据。
57.控制部25基于第一位置数据确定手5所装载的搬运对象物2在前后方向上的位置,并且基于第二位置数据和第三位置数据确定手5所装载的搬运对象物2在左右方向上的位置和朝向(搬运对象物2在水平面内的倾斜)特定。另外,第二位置数据是搬运对象物2的左右方向的一端面的、与搬运对象物2的后端相对较近的部分在左右方向上的位置的数据(参照图4(b)),第三位置数据是搬运对象物2的左右方向的、与搬运对象物2的前端相对较近的部分在左右方向上的位置的数据(参照图4(c))。
58.此外,控制部25对确定后的搬运对象物2在前后方向和左右方向上的位置(水平方向的位置)及朝向与预先教示给机器人1的搬运对象物2在水平方向上的位置及朝向进行比较,并且,在机器人1进行第二动作m12时,基于上述比较结果修正到达交接位置5b时的手5在水平方向上的位置和朝向。即,控制部25在机器人1进行第二动作m12时,基于第一位置数据、第二位置数据和第三位置数据修正到达交接位置5b时的手5在水平方向上的位置和朝向。
59.具体而言,控制部25在机器人1进行第二动作m12时,基于第一位置数据、第二位置数据和第三位置数据控制臂驱动机构20、转动机构22和水平移动机构24,并修正到达交接位置5b时的手5在水平方向上的位置和朝向。此外,控制部25在机器人1进行第二动作m12时,基于第一位置数据、第二位置数据和第三位置数据修正到达交接位置5b时的手5在水平方向上的位置和朝向,以使放置于处理装置4的搬运对象物2在水平方向上的位置成为适当位置,并且使放置于处理装置4的搬运对象物2的朝向成为适当朝向。
60.同样,控制部25获取第一位置数据、第二位置数据和第三位置数据,其中,所述第一位置数据是在机器人1进行第一动作m21时,检测机构27检测到搬运对象物2时(具体而言,检测机构27检测到装载于手6的搬运对象物2的后端时)的手6在前后方向上的位置的数据,所述第二位置数据是在检测机构27检测到搬运对象物2之后,手6移动到规定的第一测量位置时由检测机构27检测的搬运对象物2的左右方向的一端面在左右方向上的位置的数据,所述第三位置数据是经过第一测量位置后的手6移动到规定的第二测量位置时由检测机构27检测的搬运对象物2的左右方向的一端面在左右方向上的位置的数据。
61.控制部25基于第一位置数据确定手6所装载的搬运对象物2在前后方向上的位置,并且基于第二位置数据和第三位置数据确定手6所装载的搬运对象物2在左右方向上的位置和朝向。此外,控制部25对确定后的搬运对象物2在水平方向上的位置及朝向与预先教示给机器人1的搬运对象物2在水平方向上的位置及朝向进行比较,并且,在机器人1进行第二动作m22时,基于上述比较结果修正到达交接位置6b时的手6在水平方向上的位置和朝向。
62.即,控制部25在机器人1进行第二动作m22时,基于第一位置数据、第二位置数据和第三位置数据修正到达交接位置6b时的手6在水平方向上的位置和朝向。具体而言,控制部25在机器人1进行第二动作m22时,基于第一位置数据、第二位置数据和第三位置数据控制臂驱动机构21、转动机构22和水平移动机构24,并修正到达交接位置6b时的手6在水平方向上的位置和朝向。
63.此外,控制部25在机器人1进行第二动作m22时,基于第一位置数据、第二位置数据和第三位置数据修正到达交接位置6b时的手6在水平方向上的位置和朝向,以使放置于处理装置4的搬运对象物2在水平方向上的位置成为适当位置,并且使放置于处理装置4的搬运对象物2的朝向成为适当朝向。
64.另外,在将放置于收纳盒3的搬运对象物2装载于手5时,收缩的臂7以使手5移动到预先教示的接受位置5a的方式伸出。在手5上装载保持放置于收纳盒3的状态(位置和朝向)的搬运对象物2。同样,在将放置于收纳盒3的搬运对象物2装载于手6时,收缩的臂8以使手6移动到预先教示的接受位置6a的方式伸出。在手6上装设保持放置于收纳盒3的状态的搬运对象物2。
65.(本实施方式的主要效果)如以上说明的那样,在本实施方式中,控制部25在机器人1进行第一动作m11、m21时使用检测机构26、27获取第一位置数据、第二位置数据和第三位置数据,但检测机构26、27是具有受光部31和与受光部31相对配置的发光部30的透射型的检测机构。因此,在本实施方式中,即使搬运对象物2产生较大的翘曲,也能通过检测机构26、27适当地获取第一位置数据、第二位置数据和第三位置数据。因此,在本实施方式中,能基于适当的第一位置数据、第二位置数据和第三位置数据,适当地确定保持着放置于收纳盒3的状态(位置和朝向)装载于手5、6的搬运对象物2在水平方向上的位置和朝向。
66.此外,在本实施方式中,在机器人1进行第二动作m12、m22时,基于第一位置数据、第二位置数据和第三位置数据修正到达交接位置5b、6b时的手5、6在水平方向上的位置和朝向,因此,即使搬运对象物2产生较大的翘曲,也能基于适当确定后的搬运对象物2在水平方向上的位置和朝向适当地修正到达交接位置5b、6b时的手5、6在水平方向上的位置和朝向。
67.如此,在本实施方式中,即使搬运对象物2产生较大的翘曲,也能适当地确定保持着放置于收纳盒3的状态装载于手5、6的搬运对象物2在水平方向上的位置和朝向,并且能基于适当确定后的搬运对象物2在水平方向上的位置和朝向适当地修正到达交接位置5b、6b时的手5、6在水平方向上的位置和朝向。因此,在本实施方式中,即使搬运对象物2产生较大的翘曲,为了在适当地修正放置于收纳盒3的搬运对象物2在水平方向上的位置和朝向之后将搬运对象物2放置于处理装置4,也能适当地修正手5、6在水平方向上的位置和朝向。
68.在本实施方式中,分开设置有对装载于手5的搬运对象物2进行检测的检测机构26和对装载于手6的搬运对象物2进行检测的检测机构27,检测机构26和检测机构27以在上下方向上重叠的状态安装于主体部9。因此,在本实施方式中,即使臂8在搬运对象物2已装载于手6的状态下收缩,控制部25也能适当地获取第一位置数据、第二位置数据和第三位置数据,其中,所述第一位置数据是检测机构26检测到装载于手5的搬运对象物2时的手5在前后方向上的位置的数据,所述第二位置数据是在手5移动到第一测量位置时由检测机构26检测的搬运对象物2的左右方向的一端面在左右方向上的位置的数据,所述第三位置数据是在手5移动到第二测量位置时由检测机构26检测的搬运对象物2的左右方向的一端面在左右方向上的位置的数据。
69.此外,即使臂7在搬运对象物2已装载于手5的状态下收缩,控制部25也能适当地获取第一位置数据、第二位置数据和第三位置数据,其中,所述第一位置数据是检测机构27检
测到装载于手6的搬运对象物2时的手6在前后方向上的位置的数据,所述第二位置数据是在手6移动到第一测量位置时由检测机构27检测的搬运对象物2的左右方向的一端面在左右方向上的位置的数据,所述第三位置数据是在手6移动到第二测量位置时由检测机构27检测的搬运对象物2的左右方向的一端面在左右方向上的位置的数据。
70.(工业用机器人的变形例)图5是本发明另一实施方式的工业用机器人1的俯视图。图6是图5所示的工业用机器人1的侧视图。另外,在图5、图6中,对与上述实施方式相同的结构标注相同的符号。
71.在上述实施方式中,臂7和臂8在上下方向上配置于相同位置,在水平方向上互为相邻,但也可以如图5、图6所示臂7和臂8配置于在上下方向上互相错开的位置。在这种情况下,主体部9包括:臂支承件57,所述臂支承件57对臂7、8的基端侧进行支承,并且能升降;支承框58,所述支承框58将臂支承件57支承成能升降;以及回旋框59,所述回旋框59构成主体部9的下端部分。
72.如图6所示,臂7的基端侧能转动地连接于臂支承件57的上端侧,臂8的基端侧能转动地连接于臂支承件57的下端侧。支承框58经由臂支承件57将手5、6和臂7、8保持成能升降。支承框58的下端固定于回旋框59。回旋框59以能实现以上下方向为转动的轴向的转动的方式连接于基台60。基台60能相对于基座11沿左右方向直线移动。
73.臂驱动机构20以使手5在朝向一定方向的状态下相对于臂支承件57直线移动的方式使臂7伸缩。即,臂驱动机构20以使手5在朝向一定方向的状态下相对于主体部9直线移动的方式使臂7伸缩。臂驱动机构21以使手6在朝向一定方向的状态下相对于臂支承件57直线移动的方式使臂8伸缩。即,臂驱动机构21以使手6在朝向一定方向的状态下相对于主体部9直线移动的方式使臂8伸缩。
74.转动机构22以上下方向为转动的轴向使回旋框59相对于基台60转动。即,转动机构22以上下方向为转动的轴向使主体部9相对于基台60转动。升降机构23使臂支承件57相对于支承框58升降。水平移动机构24使基台60相对于基座11沿左右方向直线移动。即,水平移动机构24使主体部9与基台60一起沿左右方向直线移动。
75.检测机构26、27安装于主体部9的臂支承件57。具体而言,在固定于臂支承件57的传感器固定构件(省略图示)上固定有检测机构26、27,检测机构26、27经由传感器固定构件安装于主体部9。此外,检测机构26和检测机构27以在上下方向上重叠的状态安装于主体部9。
76.此外,检测机构26配置于如下位置,即在机器人1进行第一动作m11时,装载于手5的搬运对象物2的左右方向的一端面穿过检测机构26的发光部30与检测机构26的受光部31之间的位置。检测机构27配置于如下位置,即在机器人1进行第一动作m21时,装载于手6的搬运对象物2的左右方向的一端面穿过检测机构27的发光部30与检测机构27的受光部31之间的位置。(工业用机器人的不同的变形例)图7是本发明不同实施方式的工业用机器人1的后视图。另外,在图7中,对与上述实施方式相同的结构标注相同的符号。
77.在图7所示的工业用机器人中,在检测机构26、27与主体部9之间还包括对准机构28,所述对准机构28对将检测机构26、27安装于主体部9的位置进行调节(对准)。具体而言,
在固定于主体部9的传感器固定构件32上经由对准机构28固定有检测机构26、27,检测机构26、27经由对准机构28和传感器固定构件32安装于主体部9。对准机构28是能使检测机构26、27相对于传感器固定构件32朝x方向、y方向、z方向和xy面内的θ方向进行位置调节的平台。既可以通过对准机构28手动对检测机构26、27进行位置调节,也可以从控制部25自动调节。通过利用对准机构28调节检测机构26、27的安装位置、角度等,容易得到作为搬运对象物2、检测机构26、27的基准的位置,并且在检测机构26、27的位置、角度等错开时容易重新调节。对准机构28也可以为能实现朝上述四个方向中的至少任一个方向的调节的机构。
78.(其它的实施方式)上述实施方式是本发明理想的实施方式的一个示例,但并不限定于此,能够在不改变本发明的主旨的范围内实施各种变形。
79.在上述实施方式中,机器人1也可以除了包括配置于在机器人1进行第一动作m11时装载于手5的搬运对象物2的左右方向的一端面穿过发光部30与受光部31之间的位置的检测机构26以外,还包括配置于在机器人1进行第一动作m11时装载于手5的搬运对象物2的左右方向的另一端面穿过发光部30与受光部31之间的位置的检测机构26。
80.在这种情况下,在机器人1进行第一动作m11时,能使用两个检测机构26对装载于手5的搬运对象物2的左右方向的两个端部的缺损(碎片)的有无以及缺损的大小进行检测。另外,在这种情况下,追加设置的检测机构26的受光部31也可以不是线传感器。此外,在这种情况下,追加设置的检测机构26也可以为反射型的检测机构。
81.同样,机器人1也可以除了包括配置于在机器人1进行第一动作m21时装载于手6的搬运对象物2的左右方向的一端面穿过发光部30与受光部31之间的位置的检测机构27以外,还包括配置于在机器人1进行第一动作m21时装载于手6的搬运对象物2的左右方向的另一端面穿过发光部30与受光部31之间的位置的检测机构27。
82.在这种情况下,在机器人1进行第一动作m21时,能使用两个检测机构27对装载于手6的搬运对象物2的左右方向的两个端部的缺损(碎片)的有无以及缺损的大小进行检测。另外,在这种情况下,追加设置的检测机构27的受光部31也可以不是线传感器。此外,在这种情况下,追加设置的检测机构27也可以为反射型的检测机构。
83.在上述实施方式中,机器人1所包括的检测机构的数量也可以为一个。在这种情况下,在机器人1进行第一动作m11时,装载于手5的搬运对象物2的左右方向的一端面穿过一个检测机构的发光部30与受光部31之间,并且,在机器人1进行第一动作m21时,装载于手6的搬运对象物2的左右方向的一端面穿过一个检测机构的发光部30与受光部31之间。此外,在这种情况下,在机器人1进行第一动作m11时,臂8伸出或者在搬运对象物2未装载于手6的状态下收缩,在机器人1进行第一动作m21时,臂7伸出或在搬运对象物2未装载于手5的状态下收缩。
84.在上述实施方式中,受光部31也可以是二维排列有多个受光元件的区域传感器。在这种情况下,也能通过检测机构26对装载于手5的搬运对象物2的左右方向的一端面在左右方向上的位置进行检测。同样,能通过检测机构27对装载于手6的搬运对象物2的左右方向的一端面在左右方向上的位置进行检测。
85.在上述实施方式中,机器人1所包括的手和臂的数量也可以为一个。例如,机器人1也可以包括仅一个手5和一根臂7。在这种情况下,无须检测机构27。此外,在机器人1所包括
的手和臂的数量为一个的情况下,例如,机器人1也可以包括:第一臂部驱动机构,所述第一臂部驱动机构使第一臂部16相对于主体部9转动;第二臂部驱动机构,所述第二臂部驱动机构使第二臂部17相对于第一臂部16转动;以及手驱动机构,所述手驱动机构使手5相对于第二臂部17转动,以代替臂驱动机构20。此外,在这种情况下,机器人1例如也可以不包括转动机构22和水平移动机构24。
86.此外,在机器人1所包括的手和臂的数量为一个的情况下,臂7所包括的臂部的数量也可以为三个以上。例如,也可以如日本专利特开2019
‑
176029号公报所记载的那样,臂7所包括的臂部的数量为三个。在这种情况下,机器人1例如也可以不包括转动机构22和水平移动机构24。
87.在上述实施方式中,手5、6所包括的叉部15的数量也可以为3根以上。此外,在上述实施方式中,收纳盒3和处理装置4也可以配置于机器人1的前侧。而且,在上述实施方式中,搬运对象物2也可以是使用plp的半导体封装件的制造线中处理的大型的面板以外的构件。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

