1.本发明涉及一种人机交互设备,尤其是一种以轮子移动的机器人。
背景技术:
2.轮式机器人目前应用非常广泛,它在平整地面移动的灵活性使其成为室内箱体的首选。在一些特定情况下,需要轮式机器人达到一定高度,比如:导览机器人,为了加强交互性或者获得更大的视野,一般设计高度与常人接近。但对于轮式机器人,重心不宜过高,否则容易发生翻覆。
3.cn111891255公开了一种轮式机器人,用于运输,以替代人力执行对人体有害的任务,其包括底座以及设于底座上方的与底座相对固定的货盘,底座的左侧设有左车轮,其右侧设有与左车轮同轴设置的右车轮,底座上设有配重单元,货盘与底座之间设有用于驱动配重单元前后运动的驱动组件。该方案通过改变配重单元的位置来使机器人保持平衡状态,货盘不会发生倾斜。该方案的主要缺点有:配重使运输载荷增加,配重位置变化因受制于底盘,使得作用力臂很短、随机器人高度增加需要的配重则成倍增加,实践上可行性不高。
4.由于惯性系物体的固有属性,其通常与物体的质量具有相关性。为了提高车辆行进的稳定性,防止翻覆,常见的方法还包括:扩大底面积以降低质心等。但是在实际产品中,底面积通常是一个约束条件,过大的底面积通常需要较大的占地面积,造成存放困难。尤其对于具有交互用途的机器人,较大的占地面积同样使得人机交互的距离增大,降低了交互体验,也限制了机器人的应用范围。
技术实现要素:
5.为解决以上现有技术存在的问题,本发明的一个目的在于提供一种轮式机器人,通过控制不同方向的水流冲击,使上部交互器的运动状态与下部箱体及底盘保持同步同向移动,在保持人机交互所需高度的同时,改善其行进中的稳定性,防止翻覆。
6.本发明的另一个目的在于提供一种轮式机器人,提高人机交互的体验,尤其是在发挥引导功能的同时,还具有观赏功能,一机多用。
7.一种轮式机器人,包括控制器、上部的交互器,中部的箱体和下部的带有车轮的底盘,所述箱体内设有若干喷水部件,在运动状态发生改变时,受控制器控制,喷水部件喷水,作用于交互器上,利于交互器迅速改变运动状态,与所述箱体保持同步同向移动。
8.另一种轮式机器人,包括控制器、上部的交互器,中部的箱体和下部的带有车轮的底盘,所述箱体内设有若干喷水部件,在所述控制器控制下,所述喷水部件喷水,使得所述交互器与所述箱体分离,并与所述箱体保持同步同向移动。
9.优选地,所述交互器包括交互部、连接部和受水部,所述交互部位于所述箱体上方,受水部位于箱体内腔,箱体顶部设置通孔,连接部与通孔装配,其两端分别连接交互部和受水部,受水部受力后,推动交互部向上移动,而使交互部与箱体分离。喷水用于提供交
互器的支持力,减少头部对系统稳定性的影响。
10.优选地,受水部包括一弧面,该弧面朝向所述喷水部件弯曲。为了有效引导下落的水流,该弧面边缘靠近所述箱体的内壁,使所述箱体平稳移动。
11.优选地,所述弧面包括球面,如:1/12、1/8、1/6、1/4和1/2球面。为降低头部重量、节约材料,还可以选用勺子型曲面。
12.优选地,所述箱体的底部包括储水箱,所述喷水部件设置在该储水箱上。
13.优选地,所述箱体内每个喷水部件旁各设有一个水位传感器,所述各水位传感器将水位信息发给所述控制器,所述控制器判断并根据箱体运动状态和水位信息综合分析,选择其中的喷水部件并控制其喷水量。如果需要任意方向的推力,可将推力分解到两个正交方向,再由两个相邻喷水器分别提供。
14.优选地,所述喷水部件数量为3或4,3的整数倍或4的整数倍,在所述箱体底部均匀分布,且所述喷水部件相对于纵向呈倾斜设置。
15.优选地,所述喷水部件分布在圆周上,在所述控制器控制下根据箱体前行的方向不同在圆周上移动并开启,利于交互迅速改变运动状态,与箱体保持同步同向移动。比如:当所述喷水部件为4个时,其位置为前后左右各1个,或者与移动方向呈45度夹角的圆周上。
16.优选地,所述储水箱的开口呈斗状,以防所述箱体移动过程中水溢出。
17.优选地,所述箱体为透明材质,可以观赏下落的水流,在配合以灯光,富有观赏性。
18.本发明技术方案实现的有益效果:
19.本发明的轮式机器人,整体高度达到1.3米~1.5米,且底盘占地面积为0.1m2~0.3m2,能实现人机交互的目的,还能保持稳定移动,不易翻覆。当其启动前进、启动后退和行进中转向时,始终能持续实现人机交互,整体移动的稳定性提高,移动方便。
20.本发明的轮式机器人,通过受水部对下落水流的引导,水流由上至下形同“喷泉”。随着机器人的移动,而形成一处移动式“喷泉”景观,在人机交互同时,还具有观赏性。
附图说明
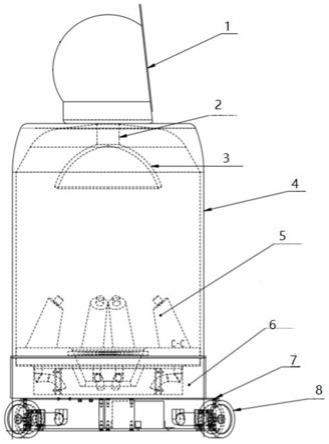
21.图1为本发明轮式机器人的侧视剖面图;
22.图2为本发明轮式机器人的主视剖面图;
23.图3为本发明轮式机器人的爆炸图;
24.图4a为本发明轮式机器人中喷水部件一实施例的俯视图;
25.图4b为本发明轮式机器人中喷水部件另一实施例的俯视图;
26.图5为本发明轮式机器人中水箱部分结构示意图;
27.图6为本发明轮式机器人的主控板信号连接框图;
28.图7为本发明轮式机器人中的多个喷水部件分别与多个水位传感器连接框图;
29.图8为本发明轮式机器人箱体外形一实施例的示意图;
30.图9为本发明轮式机器人箱体外形另一实施例的示意图;
31.图10为本发明轮式机器人箱体外形另一实施例的示意图。
32.图中1,交互部;2,连接部;3,受水部;4,箱体;5,喷水部件;6,储水箱;7,底盘;8,车轮;9,吸水管;10,水位传感器;11,电源装置;12,稳流滤水网;13,水泵
具体实施方式
33.以下通过特定的具体实施例说明本发明的实施方式,本领域的技术人员可由本说明书所揭示的内容轻易地了解本发明的其他优点及功效。
34.如图1,2,3和5所示,一种轮式机器人,包括控制器及上部交互器1,中部箱体4和下部带有车轮8的底盘7,箱体4内设有若干喷水部件5,在控制器控制下,喷水部件5喷水作用于交互器1,托举交互器1使其与箱体4分离,并与箱体4行驶速度同步。
35.交互器分为交互部1、连接部2和受水部3,交互部1安装在箱体外部顶上,在箱体4内部顶上安装受水部3,连接部2连接交互部1和受水部3并穿过箱体上端开口,且与该开口匹配。
36.其中,受水部为一弧面,该弧面朝向喷水部件,且该弧面边缘靠近箱体4的内壁,以引导下落的水流,使箱体4平稳移动。弧面可设计为球面,如1/12球面、1/8球面、1/6球面、1/4球面和1/2球面等。
37.受水部3可以与箱体4合并为一体,连接部2直接连接交互部1和箱体4。
38.其中,箱体4的底部为储水箱6,储水箱6的开口呈斗状,以防箱体在移动过程中水溢出。喷水部件5设置在该储水箱6上,该喷水部件5与水泵13连接,该水泵13设置在喷水部件5的背面,与该喷水部件5和水泵13连接的控制器设置在底盘内。喷水部件5底部连接有吸水管9,该吸水管9深入到储水箱14底部,箱体内每个喷水部件5旁各设有一个水位传感器10,各水位传感器10将水位信息发给控制器,控制器判断并根据箱体运动状态和水位信息综合分析,选择其中的喷水部件5并控制其喷水量。
39.棱柱箱体,容易加工,占据空间较大,其某一方向侧面为平面,水流喷射至平面后,会水花四溅,这种不规则的溅射将使交互器受到的推力大小产生不规则的波动。溅射的水花从空中落下,箱壁水流垂直落下,时间短。
40.本实施例的箱体4,至少包括一个截面,该截面的面积至少小于箱体一端的端面面积,优选的,截面的面积小于箱体两端的端面面积。当截面呈圆形时,则截面的直径至少小于箱体一端的端面面积,优选的,截面的面积小于箱体两端的端面面积。
41.当箱体为桶状时,至少包括若干沿其轴向连续分布的截面,这些截面的面积不等,均至少小于箱体一端的端面面积,如:圆台状(参见图8)。优选的,这些截面的面积小于箱体两端的端面面积。这些连续分布的截面中,最小面积的截面位于中位,如:葫芦状(参见图9)和沙漏状(参见图10)。
42.圆柱箱体或圆台箱体,也较容易加工,占据空间较大,其侧向面为弧面,水流喷射至弧面后,弧面可以有效约束水流向水平方向的溅射,但竖直方向还是会有不规则溅射,将使交互器受到的推力大小产生一些不规则的波动。溅射的水花很少,几乎都能沿箱壁垂直落下,且时间也短。
43.葫芦状箱体,虽然加工相对复杂,但是仅占据了水流喷射必须经过的空间。外观粗细错落有致,便于美化设计。其侧向面为球面,水流喷射至球面后,水流受到较好的约束交互器受到的推力相对平稳,利于提高运动的稳定性。溅射的水花很少,几乎都能沿箱壁垂直汩汩落下,但下落时间较长。
44.沙漏状箱体,仅占据了水流喷射必须经过的空间。外观粗细错落有致,便于美化设计。其侧向面为楔形凹槽,水流喷射至凹槽后,水流受到较好的约束交互器受到的推力相对
平稳,利于提高运动的稳定性。溅射的水花很少,几乎都能沿箱壁垂直落到中部,并形成瀑布效果,落入底部储水箱,下落时间介于葫芦状箱体和圆柱箱体者之间。
45.其中,喷水部件5可根据需要设计任何个数,如:1、2、3、5、6、7和8个等,但至少为3个,或者是3及4的整数倍,在箱体底部均匀分布,且倾斜设置,当喷水部件5是4个时,如图4所示,喷水部件5在箱体均匀间隔设置,喷水部件5的喷头均朝向箱体的中心轴线,仰角根据受水部3的位置而定,保证水流喷射到受水部3或箱体4的适当位置。设置喷水部件5的底座中间位置设有稳流滤水网12,使水均匀缓慢流入储水箱6。具体的,喷水部件至少包括喷射器,各个喷射器与至少一件泵相连,泵将高压高速水流经喷射器作用于受水部3。另一种喷水部件,至少包括一件泵和一件喷射器,喷射器与泵相连,可提高各个喷水部件对受水部3施加作用力的可控性和准确性,使得上部的交互器与箱体的移动速度和移动方向相协调。
46.为了加强交互性或者获得更大的视野,本发明轮式机器人高度可根据需要设计为1.3
‑
1.9米。且为了增加视觉效果,达到美化功能,箱体可设计为透明的,这样就可清晰看到箱体内喷头部件喷出的水幕。
47.当喷水部件为4个时,主控板信号连接框图如图6所示,本实施例的轮式机器人中的4个喷水部件与4个水位传感器通过信号线、通信接口与本实施例的主控板(即本实施例中的控制器)相连,直流电源(即为图中电源装置11)为其提供电源。4个喷水部件分别与4个水位传感器连接,如图7所示,各水位传感器将水位信息发给喷水部件,喷水部件根据水位情况进行喷水或发出告警。
48.具体工作时,喷水部件5在控制器控制下根据轮式机器人移动状态不同开启,如当喷水部件5设置为4个,且安装于轮式机器人俯视图的上、下、左和右四个位置设置喷水部件51,52,53,54时,如图4a所示,工作方式如下:
49.当本实施例的轮式机器人由左向右加速移动时,位于左侧的喷水部件54向右喷水,推动交互器由左向右加速移动,与箱体同向同步行驶。由左向右减速移动时,位于右侧的喷水部件52向左喷水,推动交互器由左向右减速移动,与箱体同向同步行驶。
50.如果轮式机器人使用全向轮,则可向任意方向进行平移运动,在平移中进行加减速时,由该方向喷水部件5为交互器提供减速推力,由相反方向喷水部件5为交互器提供加速推力。比如,当本实施例的轮式机器人向俯视图中左上方平移且加速运动时,位于右方和下方的2件喷水部件52,53同时向俯视图的左方和上方喷水,其合力推动交互器向左上方加速移动,与箱体同向同步行驶。通过选取喷水部件并控制喷射水流大小,可以得到任意方向的合成推力,从而为交互器提供任意方向的加速或减速推力,使交互器与箱体同向同步行驶。
51.当本实施例的轮式机器人由左向右移动同时进行转弯时,由位于两侧的喷水部件52,54喷水,为交互器转弯提供向心力,与箱体同步转弯。向左转弯时,由位于前进方向右侧的喷水部件53向左喷水,推动交互器向左转弯,与箱体同步左弯。向右转弯时,由位于前进方向左侧的喷水部件53向右喷水,推动交互器向右转弯,与箱体同步右弯。同理,其他方向的转弯时,也由转弯相反方向喷水部件5为交互器提供转弯向心力。
52.当本实施例的轮式机器人进行非匀速的曲线运动时,可看作平移加速或减速运动与转弯运动的叠加,由平移方向的喷水部件5提供减速推力或由平移相反方向的喷水部件5提供加速推力,由转弯相反方向喷水部件5为交互器提供转弯向心力,从而使交互器与箱体
同向同步行驶。
53.如当喷水部件5设置为4个,且安装于轮式机器人俯视图的右上、右下、左下、左上四个位置设置喷水部件51,52,53,54时,如图4b所示,工作方式如下:
54.当本实施例的轮式机器人由左向右加速移动时,位于左侧的2件喷水部件51,54同时喷水,其合力推动交互器由左向右加速移动,与箱体同向同步行驶。由左向右减速移动时,位于右侧的2件喷水部件53,54同时喷水,其合力推动交互器由左向右减速移动,与箱体同向同步行驶。
55.如果轮式机器人使用全向轮,则可向任意方向进行平移运动,在平移中进行加减速时,由该方向喷水部件5为交互器提供减速推力,由相反方向喷水部件5为交互器提供加速推力。通过选取喷水部件并控制喷射水流大小,可以得到任意方向的合成推力,从而为交互器提供任意方向的加速或减速推力,使交互器与箱体同向同步行驶。
56.当本实施例的轮式机器人由左向右移动同时进行转弯时,由喷水部件5为交互器转弯提供向心力,与箱体同步转弯。向左转弯时,由位于前进方向右侧的2件喷水部件53,54向左喷水,推动交互器向左转弯,与箱体同步左弯。向右转弯时,由位于前进方向左侧的喷水部件51,52向右喷水,推动交互器向右转弯,与箱体同步右弯。同理,其他方向的转弯时,也由转弯相反方向喷水部件为交互器提供转弯向心力。
57.当本实施例的轮式机器人进行非匀速的曲线运动时,可看作平移加速或减速运动与转弯运动的叠加,由平移方向的喷水部件提供减速推力或由平移相反方向的喷水部件提供加速推力,由转弯相反方向喷水部件为交互器提供转弯向心力,从而使交互器与箱体同向同步行驶。
58.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

