1.本发明涉及姿态动力学,具体地,涉及一种深空探测器星敏感器规避太阳的测算控制方法及系统。
背景技术:
2.深空探测器飞行过程包括脱离地球引力、进入巡航轨道或进入星地间转移轨道以及再入行星、绕飞行星,经历的空间环境变化巨大。探测器需多次变轨,分别绕行地球、太阳、目标天体飞行,且与目标天体的距离时刻变化。不同于常规地球卫星的姿控系统运行在稳定的对地模式,探测器需根据任务的需求,在对日、对地、对目标天体等多种目标姿态间进行切换,执行相应的姿态机动。深空探测器的星敏感器极易受到目标天体以及目标天体卫星的干扰,造成姿态输出数据错误,影响任务成败。
3.专利文献cn104061928a公开了一种自主择优使用星敏感器信息的方法,对所有星敏感器分别判断自检信息、输出数据与预估值进行一致性比较,再对所有星敏数据之间进行一致性判断,判断结果形成各台星敏的分数,根据分数大小进行排序,确定星敏优先级。该方法依靠星敏单机自身对星图的识别能力,在外部环境有不确定干扰,如天体遮挡等因素时,星敏自身难以保证做出正确识别。
技术实现要素:
4.针对现有技术中的缺陷,本发明的目的是提供一种深空探测器星敏感器规避太阳的测算控制方法及系统。
5.根据本发明提供的一种深空探测器星敏感器规避太阳的测算控制方法,包括:
6.步骤s1:使用上一拍探测器姿态计算星敏感器光轴在惯性系的投影,使用轨道、时间参数实时计算器日矢量,获取日矢量实时计算信息;
7.步骤s2:实时计算星敏光轴与器日矢量的夹角θ
st
‑
s
,判断夹角θ
st
‑
s
是否小于星敏太阳保护角θ
p
,获取夹角判断结果信息。即太阳是否进入了星敏的太阳保护角范围内,用于识别星敏在轨工作环境;
8.步骤s3:根据夹角判断结果信息,获取深空探测器星敏感器规避太阳的测算控制结果信息。
9.优选地,所述步骤s3包括:
10.步骤s3.1:根据夹角判断结果信息,判断太阳是否进入星敏的太阳保护角范围内,若否,获取星敏输出数据有效结果信息;
11.根据星敏输出数据有效结果信息,使用当拍星敏数据更新探测器姿态;
12.优选地,所述步骤s3还包括:
13.步骤s3.2:若是,获取星敏受到干扰信息。当前输出数据无效,使用陀螺递推计算探测器姿态,更新的姿态用于下一拍计算。
14.优选地,所述步骤s1包括:
15.步骤s1.1:使用上一拍探测器的惯性姿态c
bi
,计算星敏光轴在惯性系投影v
sti
;使用轨道计算探测器在日心惯性系下的位置,进而得到惯性系下的器日矢量v
ss
。
16.优选地,所述步骤s2包括:
17.步骤s2.1:实时计算星敏光轴与器日矢量的夹角θ
st
‑
s
,计算公式为
18.θ
st
‑
s
=arccos(v
sti
*v
ss
)
19.判断太阳是否进入了星敏保护角范围,用于识别星敏在轨工作环境,判断方法为:
[0020][0021]
其中θ
p
为星敏保护角参数。
[0022]
根据本发明提供的一种深空探测器星敏感器规避太阳的测算控制系统,包括:
[0023]
模块m1:使用上一拍探测器姿态计算星敏感器光轴在惯性系的投影,使用轨道、时间参数实时计算器日矢量,获取日矢量实时计算信息;
[0024]
模块m2:实时计算星敏光轴与器日矢量的夹角θ
st
‑
s
,判断夹角θ
st
‑
s
是否小于星敏太阳保护角θ
p
,获取夹角判断结果信息。即太阳是否进入了星敏的太阳保护角范围内,用于识别星敏在轨工作环境;
[0025]
模块m3:根据夹角判断结果信息,获取深空探测器星敏感器规避太阳的测算控制结果信息。
[0026]
优选地,所述模块m3包括:
[0027]
模块m3.1:根据夹角判断结果信息,判断太阳是否进入星敏的太阳保护角范围内,若否,获取星敏输出数据有效结果信息;
[0028]
根据星敏输出数据有效结果信息,使用当拍星敏数据更新探测器姿态;
[0029]
优选地,所述模块m3还包括:
[0030]
模块m3.2:若是,获取星敏受到干扰信息。当前输出数据无效,使用陀螺递推计算探测器姿态,更新的姿态用于下一拍计算。
[0031]
优选地,所述模块m1包括:
[0032]
模块m1.1:使用上一拍探测器的惯性姿态c
bi
,计算星敏光轴在惯性系投影v
sti
;使用轨道计算探测器在日心惯性系下的位置,进而得到惯性系下的器日矢量v
ss
。
[0033]
优选地,所述模块m2包括:
[0034]
模块m2.1:实时计算星敏光轴与器日矢量的夹角θ
st
‑
s
,计算公式为
[0035]
θ
st
‑
s
=arccos(v
sti
*v
ss
)
[0036]
判断太阳是否进入了星敏保护角范围,用于识别星敏在轨工作环境,判断方法为:
[0037][0038]
其中θ
p
为星敏保护角参数。
[0039]
与现有技术相比,本发明具有如下的有益效果:
[0040]
1、本发明提出的深空探测器规避太阳的计算方法,利用探测器轨道和当前探测器姿态,实时计算星敏受太阳照射情况,根据受照影响与否决定是否将星敏测量数据引入闭环控制,实现深空探测器姿控系统安全稳定的工作;
[0041]
2、本发明适用于深空探测器姿控系统对星敏感器工作环境进行有效识别,防止星敏错误数据引入控制系统。
附图说明
[0042]
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
[0043]
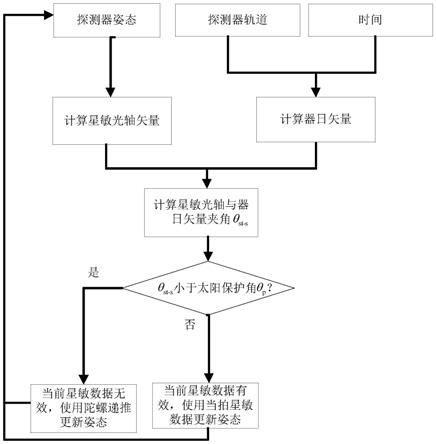
图1是本发明深空探测器规避太阳的计算方法流程图。
具体实施方式
[0044]
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
[0045]
如图1,本发明包括以下步骤:
[0046]
1、使用上一拍探测器姿态计算星敏感器光轴在惯性系的投影,使用轨道、时间参数实时计算器日矢量;
[0047]
2、实时计算星敏光轴与器日矢量的夹角θ
st
‑
s
,判断夹角θ
st
‑
s
是否小于星敏太阳保护角θ
p
,即太阳是否进入了星敏的太阳保护角范围内,用于识别星敏在轨工作环境;
[0048]
3、根据步骤2的判断结果,若太阳未进入星敏太阳保护角,则判断出星敏输出数据有效,使用当拍星敏数据更新探测器姿态;否则认为星敏受到干扰,当前输出数据无效,使用陀螺递推计算探测器姿态。更新的姿态用于下一拍计算。
[0049]
一种深空探测器星敏感器规避太阳的测算控制方法的具体实施方式如下:
[0050]
1、使用上一拍探测器的惯性姿态c
bi
,计算星敏光轴在惯性系投影v
sti
;使用轨道计算探测器在日心惯性系下的位置,进而得到惯性系下的器日矢量v
ss
。
[0051]
2、实时计算星敏光轴与器日矢量的夹角θ
st
‑
s
,计算公式为
[0052]
θ
st
‑
s
=arccos(v
sti
*v
ss
)
[0053]
判断太阳是否进入了星敏保护角范围,用于识别星敏在轨工作环境,判断方法为:
[0054][0055]
其中θ
p
为星敏保护角参数。
[0056]
3、根据步骤2的判断结果,若太阳不在星敏保护角内,认为星敏输出的数据有效,使用当拍星敏数据更新探测器姿态;否则认为星敏受到太阳干扰,当前输出数据无效,使用陀螺递推更新探测器姿态。更新的姿态用于下一拍计算。
[0057]
在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
[0058]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影
响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

