1.本实用新型属于平衡车技术领域,尤其涉及基于两轮差速驱动的多方位自主跟随平衡车及其控制方法。
背景技术:
2.平衡车是工业生产、服务行业、休闲娱乐场所、及至生活中最常见的移动载体,在娱乐、服务、物流运输、工业agv、电子宠物等领域均有广泛的应用。目前,平衡车的智能化自主跟随是其中一个重要的发展方向。为此,研究一种能多方位自主跟随的平衡车,以满足工业生产、社会服务等市场的需求,其意义深远,并且具有广阔的应用前景和较高的实用价值。
技术实现要素:
3.本实用新型的目的在于克服现有技术的不足,提供一种能多方位自主跟随的平衡车,以满足工业生产、社会服务等市场的需求。
4.本实用新型解决其技术问题是采取以下技术方案实现的:
5.基于两轮差速驱动的多方位自主跟随平衡车,包括平衡车结构主体,所述平衡车结构主体上安装差速驱动模块、自主跟随电气控制模块、自主跟随测距模块;
6.所述差速驱动模块包括一对轮状转动体,一对所述轮状转动体同轴安装在所述平衡车结构主体的底部,一对所述轮状转动体分别通过驱动机构驱动其转动;所述自主跟随测距模块能测量平衡车与被跟随者的距离,并将测量的数据传输给所述自主跟随电气控制模块,所述自主跟随电气控制模块控制所述驱动机构工作,通过一对所述驱动机构分别调节一对轮状转动体的转速来实现所述平衡车的平衡、前进、后退、转弯、停止状态,从而实现被跟随者在平衡车周边任意朝向位置上的被跟随。
7.进一步的,所述自主跟随电气控制模块包括供电模块、控制系统、陀螺仪、通讯模块,所述陀螺仪用于检测平衡车的位置与运动状态;所述供电模块通过dc
‑
dc模块为所述控制系统、陀螺仪供电,所述自主跟随测距模块将测得的数据传输到控制系统。
8.进一步的,所述控制系统采用stm32、树梅派、51系列单片机、小型工控机中的任意一种。
9.进一步的,所述自主跟随测距模块采用uwb、激光雷达、视觉图像、超声雷达、毫米波雷达、红外雷达中的任意一种测距方式实现测量平衡车与被跟随者间的距离。
10.进一步的,一对所述轮状转动体采用轮毂车轮,所述驱动机构包括一对直流伺服电机,一对所述直流伺服电机分别通过减速机连接到一对所述轮状转动体。
11.进一步的,一对所述轮状转动体采用直流伺服轮毂电机,所述驱动机构包括一对伺服电机驱动器,一对所述伺服电机驱动器驱动一对所述直流伺服轮毂电机转动,并能通过分别改变两个直流伺服轮毂电机的转速,实现两轮的差速控制。
12.进一步的,还包括手持终端,所述手持终端与被跟随者同步运动,所述手持终端通
过通讯模块与所述自主跟随电气控制模块连接,并能通过发布指令使得所述自主跟随电气控制模块工作。
13.进一步的,所述自主跟随测距模块包括两个uwb基站和一个uwb标签,两个所述uwb基站安装在平衡车结构主体上不对称的位置,所述uwb标签安装在手持终端上,所述uwb标签与两个uwb基站之间距离能发送到所述自主跟随电气控制模块。
14.进一步的,所述平衡车结构主体上还安装有自动避障模块、人脸识别模块、智能语音模块、报警模块,且所述自动避障模块、人脸识别模块、智能语音模块、报警模块均与所述控制系统电路连接;所述自动避障模块能检测平衡车前进过程中前方障碍物,并使得所述平衡车停车;所述人脸识别模块能进行人脸特征识别;所述智能语音模块能实现应用需要的语音控制、语音互动、语音识别及娱乐服务;所述控制系统能控制所述报警模块报警。
15.以上所述的基于两轮差速驱动的多方位自主跟随平衡车的控制方法,包括如下步骤:
16.获取平衡车本身的方位与状态信息、被跟随者的位置信息;
17.根据自主跟随测距模块的布置方式,以及基于测距的自主跟随控制量的选取,按照控制算法,确定跟随控制量,并与平衡车的自主平衡控制相融合,通过一对驱动机构分别调节一对轮状转动体的转速来实现平衡车的平衡、前进、后退、转弯、停止状态,从而实现被跟随者在平衡车周边任意朝向位置上的被跟随。
18.本实用新型的优点和积极效果是:
19.1、本实用新型通过一对驱动机构分别驱动一对轮状转动体,通过分别改变两个轮状转动体的转速,通过差速运动,在自主平衡的基础上,实现平衡车的前进、后退、转弯、停车;
20.2.本实用新型通过自主跟随测距模块能测量平衡车与被跟随者的距离,并将测量的数据传输给自主跟随电气控制模块,自主跟随电气控制模块通过分别改变轮状转动体的转速,实现平衡控制,也可以实现两轮的差速控制,从而达到对被跟随者的同步跟随;
21.3.本实用新型的自主跟随控制算法是基于两轮平衡车自主平衡的控制算法基础上,综合自主跟随控制,实现平衡车在自主平衡的基础上实现跟随模式;其中,跟随控制分量是根据自主跟随测距模块的布置方案,以及基于测距的自主跟随控制量的选取,按照现有的控制算法,将得到的跟随控制分量与平衡车的自主平衡控制相融合,从而实现平衡车的多方位自主跟随。
附图说明
22.以下将结合附图和实施例来对本实用新型的技术方案作进一步的详细描述,但是应当知道,这些附图仅是为解释目的而设计的,因此不作为本实用新型范围的限定。此外,除非特别指出,这些附图仅意在概念性地说明此处描述的结构构造,而不必要依比例进行绘制。
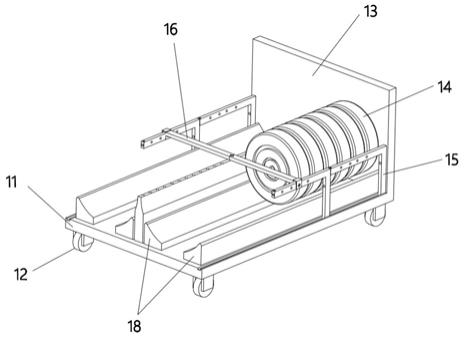
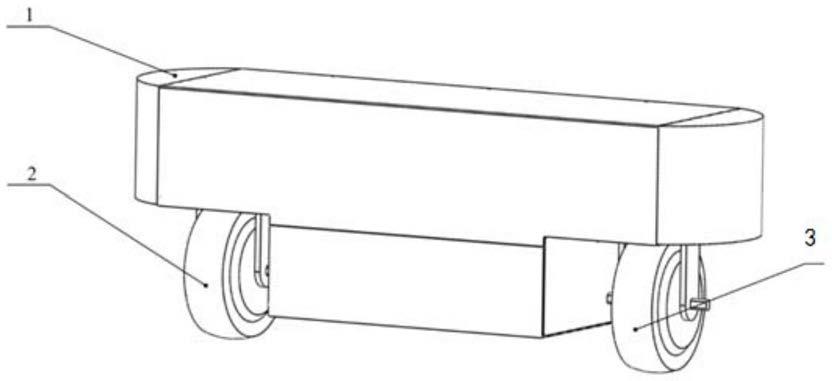
23.图1为本实用新型实施例提供的基于两轮差速驱动的多方位自主跟随平衡车的结构示意图;
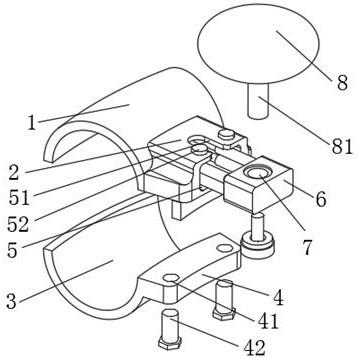
24.图2为本实用新型实施例提供的基于两轮差速驱动的多方位自主跟随平衡车的自主跟随测距模块布局结构示意图;
25.图3为本实用新型实施例提供的基于两轮差速驱动的多方位自主跟随平衡车的电气连接示意图;
26.说明:图3中所有连线仅代表某种通讯方式的关联或者元器件之间的关联,并不是实际的电路连接线路;
具体实施方式
27.首先,需要说明的是,以下将以示例方式来具体说明本实用新型的具体结构、特点和优点等,然而所有的描述仅是用来进行说明的,而不应将其理解为对本实用新型形成任何限制。此外,在本文所提及各实施例中予以描述或隐含的任意单个技术特征,或者被显示或隐含在各附图中的任意单个技术特征,仍然可在这些技术特征(或其等同物)之间继续进行任意组合或删减,从而获得可能未在本文中直接提及的本实用新型的更多其他实施例。另外,为了简化图面起见,相同或相类似的技术特征在同一附图中可能仅在一处进行标示。
28.实施例1
29.如图1
‑
3,本实施例提供的基于两轮差速驱动的多方位自主跟随平衡车,包括平衡车结构主体1,所述平衡车结构主体1上安装差速驱动模块、自主跟随电气控制模块、自主跟随测距模块;
30.所述差速驱动模块包括一对轮状转动体,如图1,分别为第一轮状转动体2、第二轮状转动体3,一对所述轮状转动体同轴安装在所述平衡车结构主体的底部,一对所述轮状转动体分别通过驱动机构驱动其转动;所述自主跟随测距模块能测量平衡车与被跟随者的距离,并将测量的数据传输给所述自主跟随电气控制模块,所述自主跟随电气控制模块控制所述驱动机构工作,通过一对所述驱动机构分别调节一对轮状转动体的转速来实现所述平衡车的平衡、前进、后退、转弯、停止状态,具体的:第一驱动机构调节第一轮状转动体的转速,第二驱动机构调节第二轮状转动体的转速,通过转速的调整实现平衡车的平衡、前进、后退、转弯、停止状态,从而实现被跟随者在平衡车周边任意朝向位置上的被跟随。
31.所述自主跟随电气控制模块包括供电模块、控制系统、陀螺仪、通讯模块,所述陀螺仪用于检测平衡车的位置与运动状态,并将检测的信息传输给控制系统,使得平衡车实现前进过程中的平衡;所述供电模块通过dc
‑
dc模块为所述控制系统、陀螺仪供电,所述自主跟随测距模块将测得的数据通过通讯模块传输到控制系统。
32.所述控制系统采用stm32、树梅派、51系列单片机、小型工控机中的任意一种。
33.所述自主跟随测距模块采用uwb、激光雷达、视觉图像、超声雷达、毫米波雷达、红外雷达中的任意一种测距方式实现测量平衡车与被跟随者间的距离;在本实施例中,采用uwb技术实现距离测量,具体的:所述自主跟随测距模块包括两个uwb基站和一个uwb标签,两个所述uwb基站安装在平衡车结构主体上不对称的位置,所述uwb标签安装在手持终端上,所述手持终端与被跟随者同步运动,所述手持终端通过通讯模块与所述自主跟随电气控制模块通过通讯模块连接,使得uwb标签与两个uwb基站之间距离能发送到所述自主跟随电气控制模块,并能通过发布指令使得所述自主跟随电气控制模块工作。
34.具体的,手持终端内可内置蓝牙无线模块用以和自主跟随电气控制模块通讯;还可在手持终端的终端面板上设前、后、左、右跟随设置按键,以及手推助力模式、停车按键,具体的设置方法属于本领域技术人员所熟知的,在此不再赘述。
35.需要说明的是,一对所述轮状转动体采用轮毂车轮,所述驱动机构包括一对直流伺服电机,一对所述直流伺服电机分别与减速机连接,一对减速机分别通过联轴器连接到一对所述轮状转动体;此外,还可以考虑另一种结构:一对所述轮状转动体采用直流伺服轮毂电机,所述驱动机构包括一对伺服电机驱动器,一对所述伺服电机驱动器驱动一对所述直流伺服轮毂电机转动,并能通过分别改变两个直流伺服轮毂电机的转速,实现两轮的差速控制。
36.为了拓展该平衡车的多种功能,还可以考虑:所述平衡车结构主体上还安装有自动避障模块、人脸识别模块、智能语音模块、报警模块;自动避障模块、人脸识别模块、智能语音模块、报警模块均与自主跟随电气控制模块中的控制系统电路连接,通过控制系统控制所述自动避障模块、人脸识别模块、智能语音模块的工作;所述自动避障模块能检测平衡车前进过程中前方障碍物,并使得所述平衡车停车;具体的,自动避障模块不限于采用超声技术、红外技术、机器视觉(如摄像头)等技术来检测障碍物,例如在平衡车结构主体的前方位置上安装摄像头,摄像头拍摄平衡车前进方向的场景,并将获取的数据传输给自主跟随电气控制模块,当自主跟随电气控制模块检测到前面有障碍物时,通过自主跟随电气控制模块控制车轮停止运动;人脸识别模块也可以通过采用摄像头来进行人脸特征识别,以满足现场应用;智能语音模块可以基于科大讯飞语音技术,采用现有的科大讯飞集成模块,实现应用需要的语音控制、语音互动和语音识别功能,并且可以提供音乐、故事播放、在线课程等服务项目;当自动避障模块检测到障碍物时,可以通过报警模块报警,或者,当人脸识别模块识别到陌生人靠近时,也可以通过报警模块报警。
37.上述的基于两轮差速驱动的多方位自主跟随平衡车的控制方法,包括如下步骤:
38.获取平衡车本身的方位与状态信息、被跟随者的位置信息;
39.根据自主跟随测距模块的布置方式,以及基于测距的自主跟随控制量的选取,按照控制算法,确定跟随控制量,并与平衡车的自主平衡控制相融合,通过一对驱动机构分别调节一对轮状转动体的转速来实现平衡车的平衡、前进、后退、转弯、停止状态,从而实现被跟随者在平衡车周边任意朝向位置上的被跟随。
40.需要说明的是,在本实施例中,控制系统中的平衡车建模与自主平衡控制器的设计采用常规的现有平衡车的方式,从而实现平衡车在前进过程中的平衡,具体过程不再赘述。
41.此外,本技术中的控制系统中的差速跟随控制器的算法是基于pid控制算法,具体设计如下:
42.以左侧跟随为例来说明侧面跟随控制器设计,如图2所示,以平衡车的中心为原点建立坐标系o
‑
xy;规定x轴负方向为前、x轴正方向方向为后,y轴负方向为左,y轴正方向为右;假设两个uwb基站分别放置在a、b点位置,a’、b’为以a、b为对角线的矩形的另外两个端点,设uwb标签位于在c点时,为平衡位置,即e
h
=0,e
l
=0,那么根据测量行到的三角形acb的三条边的长度,采用余弦定理很容易得到可以得到:
[0043][0044]
于是
[0045]
l
bd
=l
bc
cos∠cba
′ꢀꢀꢀ
(式23)
[0046]
假设uwb标签固定在被跟随者身上,并随着被跟随者的移动而实时移动,当uwb标签移动到c’点时,分别可以得到三角形ac’b的三条边的长度,采用余弦定理很容易得到
[0047][0048]
于是
[0049]
l
bd
′
=l
bc
′
cos∠c
′
ba
′ꢀꢀꢀ
(式25)
[0050]
那么
[0051]
e
l
=l
bd
′
‑
l
bd
ꢀꢀꢀ
(式26)
[0052]
同理得
[0053]
e
h
=l
c
′
d
′
‑
l
cd
ꢀꢀꢀ
(式27)
[0054]
当uwb标签移动到c’点时,在xy方向上相对于c点产生的位移量分别为e
l
、e
h
,分别构建pid控制器
[0055][0056][0057]
其中,u
x
为使平衡车向前跟随的控制量,u
y
为使平衡车为了保持与被跟随的侧面距离而施加左右两个后轮的差速控制量,假设平衡车当前时刻的移动速度为v0(可以由直流伺服电机的内置编码器测量得到),平衡车的实时平衡控制分量为u*(可以通过平衡车建模与自主平衡控制器的设计获得),k
p
、k
d
、k
i
分别是pid控制器的比例系数、微分系数、积分系数,其上标x、y代表其在x、y两个方向上的系数,那么,综合平衡控制分量,施加于左右两个后轮的速度为
[0058][0059][0060]
以此同理,容易设计得到右侧面跟随的控制器的设计;
[0061]
以前侧跟随为例来说明前后跟随控制器设计,如图2所示,以平衡车的中心为原点建立坐标系o
‑
xy;规定x轴负方向为前、x轴正方向方向为后,y轴负方向为左,y轴正方向为右;设uwb标签位于在f点时,为平衡位置,即e
fh
=0,e
fl
=0,假设uwb标签固定在被跟随者身上,并随着被跟随者的移动而实时移动,当uwb标签移动到f’点时,得到e
fh
、e
fl
的值;那么,当uwb标签移动到f’点时,在xy方向上相对于f点产生的位移量分别为e
fl
、e
fh
,分别构建pid控制器
[0062][0063][0064]
其中,μ
x
为使向前跟随的控制量,μ
y
为使为了保持与被跟随的左右偏离而施加左右两个后轮的差速控制量,假设当前时刻的移动速度为v0(可以由直流伺服电机的内置编码器测量得到),平衡车的实时平衡控制分量为u*(可以通过平衡车建模与自主平衡控制器的
设计获得),k
p
、k
d
、k
i
分别是pid控制器的比例系数、微分系数、积分系数,其上标x、y代表其在x、y两个方向上的系数,那么,施加于左右两个后轮的速度为
[0065][0066][0067]
以此同理,容易设计得到后面跟随的控制器;
[0068]
需要说明的是,l
mn
为点m、n之间的距离;
[0069]
需要说明的是,控制系统中的差速跟随控制器的算法设计可以采用上述的pid控制算法,还可以采用最优控制、自抗扰控制、自适应控制、滑模控制、棒
‑
棒控制、鲁棒控制等现有的控制算法,具体设计算法不再一一赘述。
[0070]
以上实施例对本实用新型进行了详细说明,但所述内容仅为本实用新型的较佳实施例,不能被认为用于限定本实用新型的实施范围。凡依本实用新型申请范围所作的均等变化与改进等,均应仍归属于本实用新型的专利涵盖范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。