一种基于can总线的修井铁钻工远程操作装置
技术领域
1.本实用新型涉及石油修井辅助设备领域,更具体地,涉及一种基于can总线的修井铁钻工远程操作装置。
背景技术:
2.石油钻探开发过程钻修井操作中,起下钻操作是高频率工作,在起下钻操作中操作者的劳动强度大,安全性差,效率低。铁钻工作为液压大钳的替代产品是一种多功能安全高效的先进钻杆/钻具上扣/卸扣工具,铁钻工能够代替操作工人完成钻具的拆、卸,进而降低事故的发生概率和提高钻井的效率。
3.目前铁钻工一般采用全液压控制再配合上现代化的机电控制,实现产品的自动化,其中,铁钻工主要固定在钻修井平台上,因此存在手动操作安全性和工作效率低的问题,用户需要在司钻房远程操作,且目前的铁钻工采用硬接线远程操作存在施工成本较高、可扩展性及灵活性不足。
技术实现要素:
4.本实用新型为克服上述现有技术所述的铁钻工采用硬接线远程操作存在施工成本较高、可扩展性及灵活性不足的缺陷,提供一种基于can总线的修井铁钻工远程操作装置。
5.为解决上述技术问题,本实用新型的技术方案如下:
6.一种基于can总线的修井铁钻工远程操作装置,包括采集模块、操作开关模块和电源模块,其中,所述采集模块包括can通信接口,采集模块通过can通信接口采用can总线与铁钻工控制系统通信连接,所述操作开关模块与所述采集模块电性连接;所述电源模块的输出端分别与所述采集模块、操作开关模块的供电端电性连接。
7.本技术方案中,所述操作开关模块用于负责远程操作,并获取修井铁钻工工位位置、主钳中位、卸扣时间等操作数据,所述采集模块通过can总线与铁钻工控制系统实时通讯。工作人员通过调控操作开关模块调整操作数据,采集模块对操作数据进行采集处理后通过can总线远程传输至铁钻工控制系统,铁钻工控制系统执行相应操作,实现修井铁钻工远程操作。
8.作为优选方案,所述采集模块包括canopen io输入输出模块。
9.作为优选方案,所述采集模块包括27路数字输入、16路数字输出、4路继电器输出、4路模拟输入、2路模拟输出、2路pwm 输出、io连接器。
10.作为优选方案,所述操作开关模块包括急停开关、操作模式开关、控制切换开关、管柱扣型开关、旋扣钳动作开关、冲扣钳动作开关、自动模式开关、工位转换开关、钳体伸缩开关、钳体升降开关、旋扣器升降开关、工位标定开关、主钳中位标定开关、卸扣时间开关、电源开关。
11.作为优选方案,所述卸扣时间开关包括旋钮式变阻器和与旋钮式变阻器串联电性
连接的精密电阻。
12.作为优选方案,所述装置还包括指示灯模块,所述指示灯模块的输入端与所述采集模块的输出端电性连接;所述电源模块的输出端与所述指示灯模块的供电端电性连接。
13.作为优选方案,所述指示灯模块包括预紧状态指示灯、紧扣状态指示灯、报警状态指示灯。
14.作为优选方案,所述装置还包括显示模块,所述显示模块通过can总线与所述采集模块通信连接。
15.作为优选方案,所述显示模块包括触摸屏显示器。
16.作为优选方案,所述触摸屏显示器采用can总线显示屏。
17.与现有技术相比,本实用新型技术方案的有益效果是:本实用新型中的采集模块通过can总线与铁钻工控制系统实时通讯,将操作开关模块的操作数据远程传输至铁钻工控制系统响应,实现修井铁钻工远程操作功能;可根据用户需求灵活组合,与铁钻工控制系统实时通讯,实现远程传输,具有可扩展性、灵活性等特点,性能稳定。
附图说明
18.图1为实施例1的基于can总线的修井铁钻工远程操作装置的电气结构示意图。
19.图2为实施例1的基于can总线的修井铁钻工远程操作装置的操作面板示意图。
20.图3为实施例2的基于can总线的修井铁钻工远程操作装置的电气结构示意图。
21.图4为实施例2的基于can总线的修井铁钻工远程操作装置的操作面板示意图。
22.图5为实施例3的基于can总线的修井铁钻工远程操作装置的电气结构示意图。
23.图6为实施例3的基于can总线的修井铁钻工远程操作装置的操作面板示意图。
24.其中,1
‑
采集模块,101
‑
can通信接口,2
‑
操作开关模块,201
‑
急停开关,202
‑
操作模式开关,203
‑
控制切换开关,204
‑
管柱扣型开关,205
‑
旋扣钳动作开关,206
‑
冲扣钳动作开关,207
‑
自动模式开关,208
‑
工位转换开关,209
‑
钳体伸缩开关,210
‑
钳体升降开关,211
‑
旋扣器升降开关,212
‑
工位标定开关,213
‑
主钳中位标定开关,214
‑
卸扣时间开关,215
‑
电源开关,3
‑
电源模块,4
‑
指示灯模块,401
‑
预紧状态指示灯,402
‑
紧扣状态指示灯,403
‑
报警状态指示灯,5
‑
显示模块。
具体实施方式
25.附图仅用于示例性说明,不能理解为对本专利的限制;
26.为了更好说明本实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;
27.对于本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
28.下面结合附图和实施例对本实用新型的技术方案做进一步的说明。
29.实施例1
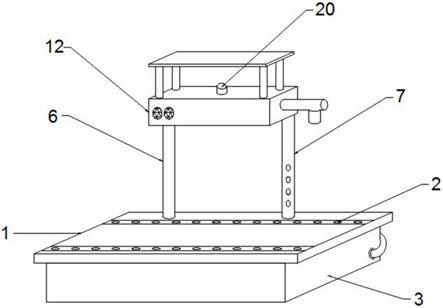
30.本实施例提出一种基于can总线的修井铁钻工远程操作装置,如图1~2所示,为本实施例的一种基于can总线的修井铁钻工远程操作装置的结构示意图。
31.本实施例提出的一种基于can总线的修井铁钻工远程操作装置中,包括采集模块
1、操作开关模块2和电源模块3,其中,所述采集模块1包括can通信接口101,采集模块1通过其can通信接口101采用can总线与铁钻工控制系统通信连接,所述操作开关模块2与所述采集模块1电性连接;所述电源模块3的输出端分别与所述采集模块1、操作开关模块2的供电端电性连接。
32.本实施例中的采集模块1采用canopen io
‑
c12型号的canopen io输入输出模块,其中包括27路数字输入、16路数字输出、4路继电器输出、4路模拟输入、2路模拟输出、2路pwm 输出、io连接器。
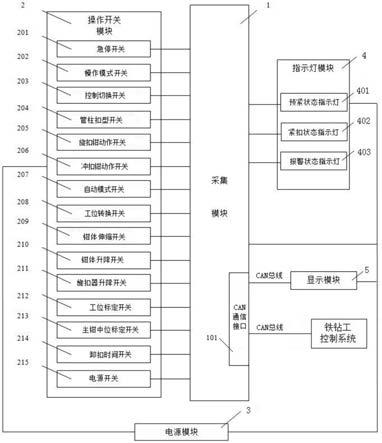
33.本实施例中的操作开关模块2包括急停开关201、操作模式开关202、控制切换开关203、管柱扣型开关204、旋扣钳动作开关205、冲扣钳动作开关206、自动模式开关207、工位转换开关208、钳体伸缩开关209、钳体升降开关210、旋扣器升降开关211、工位标定开关212、主钳中位标定开关213、卸扣时间开关214、电源开关215。
34.进一步的,本实施例中的卸扣时间开关214包括旋钮式变阻器和与旋钮式变阻器串联电性连接的精密电阻。
35.在具体实施过程中,工作人员通过调控操作开关模块2调整操作数据,采集模块1对操作数据进行采集处理后通过can通信接口101采用can总线远程传输至铁钻工控制系统,铁钻工控制系统执行相应操作,实现修井铁钻工远程操作。
36.具体的,紧急情况下快速按下所述急停开关201来达到紧急停车保护;选择所述操作模式开关202实现手动/自动上卸扣操作;选择所述控制切换开关203实现本地/触控/遥控操作;选择所述管柱扣型开关204根据管柱的扣型实现正扣/反扣操作;选择所述旋扣钳动作开关205实现上扣/停止/卸扣操作;选择所述冲扣钳动作开关206实现紧扣/停止/松扣操作;选择所述自动模式开关207实现管柱自动紧扣/停止/松扣操作;选择所述工位转换开关208实现铁钻工自动定位井口/鼠洞/待机位置操作;选择所述钳体伸缩开关209实现钳体伸出/缩回操作;选择所述钳体升降开关210实现钳体上升/下降操作;选择所述旋扣器升降开关211实现微调旋扣器上升/下降操作;选择所述工位标定开关212和所述工位转换开关208配合实现铁钻工不同工位的标定;选择所述主钳中位标定开关213实现铁钻工主钳中位的标定;选择所述卸扣时间开关214通过旋转旋钮,旋钮式变阻器和串联的精密电阻组成的分压电路电压改变,由所述采集模块1采集模拟量电压变化经相关数据处理后实现卸扣时间的设置。
37.实施例2
38.本实施例在实施例1提出的一种基于can总线的修井铁钻工远程操作装置的基础上作出修改。如图3~4所示,为本实施例的一种基于can总线的修井铁钻工远程操作装置的结构示意图。
39.本实施例提出的一种基于can总线的修井铁钻工远程操作装置中,包括采集模块1、操作开关模块2和电源模块3,其中,所述采集模块1通过can通信接口101采用can总线与铁钻工控制系统通信连接,所述操作开关模块2与所述采集模块1电性连接;所述电源模块3的输出端分别与所述采集模块1、操作开关模块2的供电端电性连接。
40.进一步的,本实施例提出的一种基于can总线的修井铁钻工远程操作装置还包括指示灯模块4,所述指示灯模块4的输入端与所述采集模块1的输出端电性连接;所述电源模块3的输出端与所述指示灯模块4的供电端电性连接。
41.本实施例中,指示灯模块4包括预紧状态指示灯401、紧扣状态指示灯402、报警状态指示灯403。
42.在具体实施过程中,采集模块1对采集的操作数据进行处理后经继电器输出端向指示灯模块4输出铁钻工动作状态,并控制指示灯模块4中的预紧状态指示灯401、紧扣状态指示灯402、报警状态指示灯403工作,用于直观地表示当前铁钻工状态。
43.实施例3
44.本实施例在实施例1或实施例2提出的一种基于can总线的修井铁钻工远程操作装置的基础上作出修改。如图5~6所示,为本实施例的一种基于can总线的修井铁钻工远程操作装置的结构示意图。
45.本实施例提出的一种基于can总线的修井铁钻工远程操作装置中,包括采集模块1、操作开关模块2和电源模块3,其中,所述采集模块1通过can通信接口101采用can总线与铁钻工控制系统通信连接,所述操作开关模块2与所述采集模块1电性连接;所述电源模块3的输出端分别与所述采集模块1、操作开关模块2的供电端电性连接。
46.进一步的,本实施例提出的一种基于can总线的修井铁钻工远程操作装置还包括显示模块5,所述显示模块5通过can总线与所述采集模块1通信连接。
47.本实施例中的显示模块5采用型号为hc
‑
suk8102的10寸can总线人机界面与采集模块1通过can总线通信连接。
48.在具体实施过程中,先调节控制切换开关203至触控模式,工作人员通过显示模块5输入操作指令,采集模块1对显示模块5输入的操作指令数据进行处理后通过can总线将操作数据传输至铁钻工控制系统,铁钻工控制系统执行相应操作,实现修井铁钻工远程操作。铁钻工控制系统将操作数据通过can总线反馈至采集模块1中,采集模块1对操作数据进行处理后分别输出至指示灯模块4、显示模块5中进行显示,解决了铁钻工本体与远程操作台之间的距离问题,不仅能够完成显示操作开关状态、铁钻工运行状态,还能实现工位标定、主钳中位标定、卸扣时间、扭矩设置、压力设置、报警设置等功能。
49.相同或相似的标号对应相同或相似的部件;
50.附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制;
51.显然,本实用新型的上述实施例仅仅是为清楚地说明本实用新型所作的举例,而并非是对本实用新型的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型权利要求的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。