基于移动agv底盘的负载调姿平台
技术领域
1.本实用新型涉及到工业装配、室内运输、仓储物流领域,特指基于移动agv底盘的负载调姿平台。
背景技术:
2.现在的工业装配领域中,对于零部件的组装工作往往需要固定的组装工位,配合机械臂一类的组装设备实现组装流程,存在占地面大,成本高,需要额外运输设备等不足。对于仓储物流行业,其运输的物件一般仅支持简单的举升,无法对其他方向进行调节,无法满足特定物件摆放姿态的要求。
技术实现要素:
3.针对上述不足,本实用新型解决的技术问题在于提供一种基于移动agv底盘的负载调姿平台,其自身就是一个小型组装空间,通过多台机器的协同工作,就能够实现零件拼接,组装等工作。同时可以充当一般运输agv的作用,组装好的成品可以直接运输至指定区域。
4.本实用新型的目的是通过以下技术方案实现的:
5.基于移动agv底盘的负载调姿平台,所述调姿平台包括移动承载上平台、虎克铰、电动缸、伺服电机、下平面和调姿平台控制柜;所述移动agv底盘包括双轮驱动、激光雷达、防撞条、外部接口和电子指示屏。
6.优选地,所述调姿平台设置在所述移动agv底盘上方,两者由机构件固定,调姿平台由调姿平台控制柜接受调姿指令,并将包含6个自由度的姿态信息(俯仰α,滚转β,偏航γ,侧向位移x,纵向位移y,垂直升降z)解算为6个电动缸的缸长,接着根据解算信息驱动伺服电机将电动缸达到指定缸长,进而使得承载上平台运动到指定姿态,其中虎克铰起到连接上下平台和电动缸的作用;
7.优选地,所述移动agv底盘直接连接着调姿平台的下平面,用于承载和搬运调姿平台至指定位置工作,所述移动agv底盘是基于激光slam导航的自主移动底盘,具有路径规划,自主导航,自主避障等功能。
8.优选地,所述的移动agv底盘,其激光雷达是其中导航和避障的主要传感器,通过检测自身发射出的激光束来获取目标的信息。
9.优选地,所述的移动agv底盘采用双轮驱动的移动控制方式,支持前后,旋转方向的移动。
10.优选地,所述的移动agv底盘具备防撞条保护机身安全;其预留的外部接口和电子指示屏是便于调试和异常信息反馈。
11.与现有技术相比较,针对零部件装配行业中组装设备占地面积大和成本高的问题,本实用新型解决的技术问题在于提供一种基于移动agv底盘的负载调姿平台,所述平台包括调姿平台、移动agv底盘,可以通过多台机器协同工作,灵活布置工作空间,小巧的机器
设计也降低了运作成本。调姿平台的调控精度高,可以满足绝大多数零件组装的要求。组装好的成品放置于平台之上,可以通过调度系统直接运送至成品存储区,不需要额外的运输的设备,从而节约了整体的成本。大多数物流agv采用举升式运输货物,特定行业中对零部件的摆放姿态有特定的要求,本实用新型通过控制调姿平台的方向和角度实现该要求。
附图说明
12.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本实用新型的实施例,并与说明书一起用于解释本实用新型的原理。
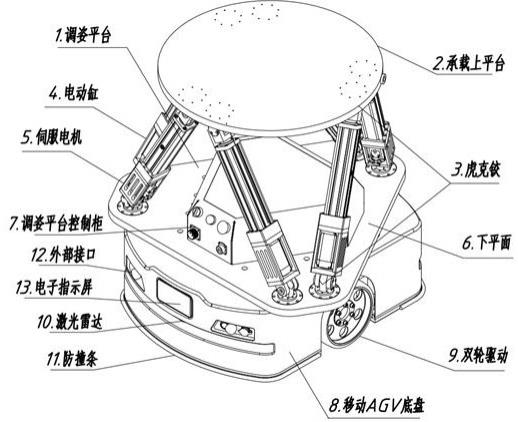
13.图1为本实用新型一种基于移动agv底盘的负载调姿平台的整体结构示意图。包括调姿平台(1);承载上平台(2);虎克铰(3);电动缸(4);伺服电机(5);下平面(6);调姿平台控制柜(7);移动agv底盘(8);双轮驱动(9);激光雷达(10);防撞条(11);外部接口(12)和电子指示屏(13)。
具体实施方式
14.为使本申请的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本申请作进一步详细的说明。
15.本实用新型基于移动agv底盘的负载调姿平台,如图1所示,所述调姿平台(1)包括移动承载上平台(2)、虎克铰(3)、电动缸(4)、伺服电机(5)、下平面(6)和调姿平台控制柜(7);所述移动agv底盘(8)包括双轮驱动(9)、激光雷达(10)、防撞条(11)、外部接口(12)和电子指示屏(13)。
16.优选地,所述调姿平台(1)设置在所述移动agv底盘(8)上方,两者由机构件固定,确保调姿平台(1)的稳定,不会因为移动agv底盘(8)运动而失衡;调姿平台(1)由调姿平台控制柜(7)接受调姿指令,并将包含6个自由度的姿态信息(俯仰α,滚转β,偏航γ,侧向位移x,纵向位移y,垂直升降z)解算为6个电动缸(4)的缸长,接着根据解算信息驱动伺服电机(5)将电动缸(4)达到指定缸长,进而使得承载上平台(2)运动到指定姿态,其中虎克铰(3)起到连接上下平台(2、4)和电动缸(4)的作用;
17.优选地,所述的移动agv底盘(8),其激光雷达(10)是其中导航和避障的主要传感器,通过检测自身发射出的激光束来获取目标的信息,主要获取目标距离信息,通过比对当前环境信息和已有地图,可以实现定位,导航等功能;当导航路线中出现障碍物时,激光雷达(10)能够及时检测出,并通过导航算法重新更换路线或者停止移动。
18.优选地,所述的移动agv底盘(8)采用双轮驱动(9)的移动控制方式,支持前后,旋转方向的移动。
19.优选地,所述的移动agv底盘(8)具备防撞条(11)保护机身安全,同时对工作环境起到一定保护作用,降低可能导致的意外损失;其预留的外部接口(12)和电子指示屏(13)是便于调试和异常信息反馈,电子指示屏(13)能够显示电池电量,错误码等信息。
20.与现有技术相比较,针对零部件装配行业中组装设备占地面积大和成本高的问题,本实用新型解决的技术问题在于提供一种基于移动agv底盘的负载调姿平台,所述平台包括调姿平台、移动agv底盘,可以通过多台机器协同工作,灵活布置工作空间,小巧的机器设计也降低了运作成本。调姿平台的调控精度高,可以满足绝大多数零件组装的要求。组装
好的成品放置于平台之上,可以通过调度系统直接运送至成品存储区,不需要额外的运输的设备,从而节约了整体的成本。大多数物流agv采用举升式运输货物,特定行业中对零部件的摆放姿态有特定的要求,本实用新型通过控制调姿平台的方向和角度实现该要求。
技术特征:
1.基于移动agv底盘的负载调姿平台,其特征在于,所述调姿平台(1)包括移动承载上平台(2)、虎克铰(3)、电动缸(4)、伺服电机(5)、下平面(6)和调姿平台控制柜(7);所述移动agv底盘(8)包括双轮驱动(9)、激光雷达(10)、防撞条(11)、外部接口(12)和电子指示屏(13)。2.根据权利要求1所述的基于移动agv底盘的负载调姿平台,其特征在于,调姿平台(1)设置在所述移动agv底盘(8)上方,两者由机构件固定。3.根据权利要求1所述的基于移动agv底盘的负载调姿平台,其特征在于,所述移动agv底盘(8)直接连接着调姿平台(1)的下平面(6),用于承载和搬运调姿平台(1)至指定位置工作,所述移动agv底盘(8)是基于激光slam导航的自主移动底盘。4.根据权利要求1所述的基于移动agv底盘的负载调姿平台,其特征在于,所述的移动agv底盘(8),其激光雷达(10)是其中导航和避障的主要传感器,通过检测自身发射出的激光束来获取目标的信息。5.根据权利要求1所述的基于移动agv底盘的负载调姿平台,其特征在于,采用双轮驱动(9)的移动控制方式,支持前后,旋转方向的移动。6.根据权利要求1所述的基于移动agv底盘的负载调姿平台,其特征在于,具备防撞条(11)保护机身安全;其预留的外部接口(12)和电子指示屏(13)是便于调试和异常信息反馈。
技术总结
本实用新型提供一种基于移动AGV底盘的负载调姿平台,所述平台包括调姿平台、移动AGV底盘;所述调姿平台是由6个电动缸支撑,承载上平台与电动缸采用虎克铰连接,电动缸与下平台采用虎克铰连接,调姿平台控制柜由计算机控制系统组成,其接收位姿信息,再解算位姿
技术研发人员:石飞 钮旭东 孔志伟
受保护的技术使用者:上海威瞳视觉技术有限公司
技术研发日:2020.12.29
技术公布日:2021/10/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

