1.本实用新型属于水运工程领域,具体为一种基于matlab环境,反映船闸运行时,在实际调度规则控制下的船舶过闸全过程调度仿真模型。
背景技术:
2.内河航运是支撑内河流域经济社会良性发展的基础性行业,船闸作为内河航运中重要的通航枢纽建筑是其中的关键环节。而作为沟通水系的永久性建筑物,船船舶过闸的不连续通行特性也制约了船闸的通过能力。随着船舶过闸需求的增加和外部因素影响,持续增长的船舶密度影响了船闸运行效率,增加了船舶待闸时间,造成了船闸航段内船舶一定程度的集聚,进而影响整个航运系统的运行效率。
3.我国jtj305—2001《船闸总体设计规范》规定,船闸通过能力是指设计水平年过闸船舶的总载质量和过闸货运量,并应以年单向通过能力进行表示。而在实际应用中,船闸通过能力一般是指设计水平年在一定的船型组成情况下通过船闸的单向货运量。船闸通过能力受到闸室尺度、到闸船型及组合、一次过闸时间、船闸运营规则等因素的影响。船闸通过能力是船闸设计与运营阶段的关键指标。在建设阶段,关系到船闸级别规模的确定,而在运营阶段,又受到船闸运营调度的影响。保证船闸高效运行,关乎内河航运“大动脉”的通畅,关涉到经济社会发展大局。
4.目前,在对《船闸总体设计规范》规定的过闸货运量计算时,仅能考虑闸室尺度、到闸船型及组合、一次过闸时间等基本因素,无法考虑船闸运营规则等复杂因素。规范公式方法需手工排挡确定一次过闸平均吨位,主观性强,影响了结果精确性;排队方法为达到可解性需对问题进行了一定的简化处理,存在一定的局限性和限制;仿真排挡是比较初级的仿真方法,不是船舶过闸的全过程模拟,无法模拟调度规则。
5.上述方法中的不足,尤其在复线或多线多级船闸的复杂情况下,造成了计算结果与实际情况间较大的偏差,限制了工程实际中的应用。
技术实现要素:
6.本实用新型的目的在于提供一种能够反映船闸实际运营调度规则的仿真模型,以解决上述背景技术中提出的问题。
7.为实现上述目的,本实用新型提供如下技术方案:
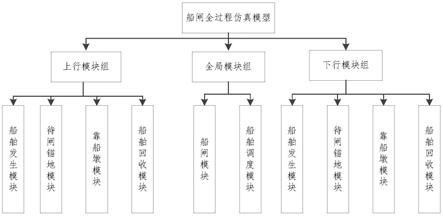
8.一种反映船闸调度规则的全过程仿真模型,模型包括上行、下行和全局三组模块;
9.所述上行、下行模块中包含船舶发生模块、待闸锚地模块、靠船墩模块和船舶回收模块组成,模块间以服务模块和门模块相连;门模块用来控制过闸步骤中的船舶批次控制,服务模块用来控制船舶批次在各个模块中消耗的时间;
10.全局模块组由船闸模块和船舶调度模块组成,模块各与监视器模块相连,以统计系统各模块实时状态和船闸相关指标;将船舶调度模块与定时器相连,在规定间隔时间输入定时信号。
11.船闸过闸过程按照上行—下行—上行—下行—
……
的方式循环往复,船舶上下行过闸按如下流程进行:到达船舶在待闸锚地停靠,并通知调度模块;当调度模块对过闸船舶完成调度后形成过闸批次,并通知该批次中的船舶到达靠船墩等候;后进闸的船只最靠近靠船墩,先进船闸的船只在最外面,离靠船墩最远,过闸准备工作完成后,调度模块通知船舶依次离开靠船墩进入闸室并系缆;船闸关入口闸门;船闸进行充放水;船闸开出口闸门;船舶离开船闸;调度模块调度对向船舶过闸。
12.与现有技术相比,本实用新型的有益效果在于:
13.(1)将船舶的发生与过闸过程分离,既考虑了到闸船型及组合因素,也考虑了船闸运营时期实际过闸的调度情况,解决了目前仿真模型中的不足;
14.(2)将船舶的发生与过闸过程分离,使得本仿真模型既可以应用于单线船闸,也可以组合应用于多线和多级船闸,提高了仿真模型的适用性;
15.(3)可以反映船闸实际生产作业的全过程,既可以为船闸设计人员提供通过能力依据,也可供运营人员检验船闸调度规则效果,进一步对交通组织进行优化。
附图说明
16.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
17.图1是本实用新型的仿真模型模块组的逻辑组织图;
18.图2是本实用新型的具体实施例中仿真模型的具体实现图;
19.图3是本实用新型的具体实施例中的调度模块示意。
具体实施方式
20.下面结合附图和具体实施方式,进一步阐明本实用新型,应理解下述具体实施方式仅用于说明本实用新型而不用于限制本实用新型的范围。需要说明的是,下面描述中使用的词语“前”、“后”、“左”、“右”、“上”和“下”指的是附图中的方向,词语“内”和“外”分别指的是朝向或远离特定部件几何中心的方向。
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
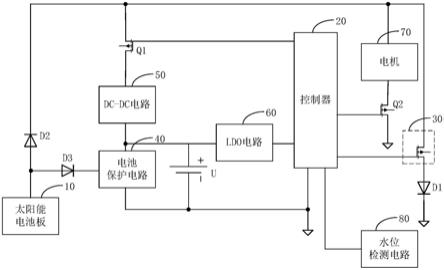
22.本实用新型提供一种技术方案,一种能够反映船闸实际运营调度规则的仿真模型,参阅图2中本具体实施例的仿真模型matlab实现。模型包括上行、下行和全局三组模块,所述上下行模块中包含船舶发生模块3barge、待闸锚地模块4anchorage、靠船墩模块5dolphin和船舶回收模块6termination组成,上述所述模块间以服务模块7server和门模块8door相连。门模块8door用来控制过闸步骤中的船舶批次控制,服务模块7server用来控制船舶批次在各个模块中消耗的时间。全局模块组由船闸模块2lock和船舶调度模块1schedule组成。上述所述模块各与监视器模块9monitor相连,以统计系统各模块实时状态和船闸相关指标。另外,将船舶调度模块1schedule与定时器10timer相连,在规定间隔时间
输入定时信号。
23.步骤一:收集船舶相关基础信息,包括过闸船舶类型、尺度及比例(如表1所示)、船舶到达时间规律等资料,输入船舶发生模块3barge,建立船舶模型。
24.表1过闸船型艘次比例及尺度
[0025][0026]
步骤二:将仿真闸室尺度(280mx28m)输入船闸模块2lock,建立船闸尺度模型。
[0027]
步骤三:设定仿真模型的运行时间,以秒(s)为单位,以三十天时间为例,共3600*24*30=2592000(s)。设定当前过闸方向为下行,初始化各模块状态,包括闸室闸门开关状态,各模块间门模块状态,将各监视器模块状态清零。
[0028]
步骤四:开始仿真模型运行,由调度模块统一发出对各个模块的控制指令,由监视器记录各个模块的状态参量。参阅附图3,调度模块由消息总线接收上下行船舶到达信号、上下行调度过程信号以及定时器发送的时间信号。对上下行各个模块的控制由上下行消息总线传输到上下行各个模块。
[0029]
步骤五:模型运行结束,由各监视器模块汇总仿真模型输出量,包括上下行各调度批次、上下行每调度包含船型,数量,上下次各阶段用时,统计模型最终统计量,包括:
[0030]
1.其中z
i
为上(下)行第i个过闸批次的过闸船数,n为上(下)行总过闸批次数。
[0031]
2.其中w
i
为上(下)行第i个过闸批次第j艘船的吨位数,m为第i个过闸批次的过闸船数,n为上(下)行总过闸批次数,
[0032]
3.其中w
i
为上(下)行第i个过闸批次第j艘船的面积,m为第i个过闸批次的过闸船数,n为上(下)行总过闸批次数,s
lock
为闸室面积。
[0033]
以上所述仅是本实用新型的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
[0034]
本实用新型方案所公开的技术手段不仅限于上述实施方式所公开的技术手段,还包括由以上技术特征任意组合所组成的技术方案。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。