1.本发明涉及一种考虑四旋翼无人机电机故障后的智能容错姿态控制方法,可以解决四旋翼无人机面对外部干扰、模型不确定甚至电机故障后带来的无人机姿态控制的难题,属于无人机飞行控制应用领域。
背景技术:
2.随着微机系统和机载计算机的发展,市场上出现了越来越多的小型无人机。机载传感器/有效载荷的重量和位置取决于不同的应用,并且机载传感器和仪器的成本可以很容易地超过无人机本身的成本。此外,无人机普遍应用于复杂危险环境,这将严重威胁无人机的安全性和可靠性。无人机发生的任何故障都很容易损坏无人机本身、机载传感器和仪器以及周围环境。因此,研究无人机的安全性和可靠性变得势在必行,相应的问题需要具体考虑。
3.在四旋翼无人机系统中,电机部分失去控制效能是一种常见的故障。与传统的有人驾驶飞机和大型无人机不同,由于硬件冗余的限制,可靠的控制系统在确保四旋翼无人机可接受和高效的性能方面起着重要的作用。此外,四旋翼无人机故障情况下不具备固定翼飞机的滑翔特性。即使是组件级别的故障也可能波及整个系统,最终导致整个系统故障。因此,如果故障没有被正确识别,四旋翼无人机很可能发生坠毁,除了无人机本身的损失这也将损坏昂贵的机载仪器。实现上述安全性和可靠性要求的一个有希望的方法是采用低成本的先进故障诊断和调整方案。
4.在四旋翼无人机容错控制领域,论文《experimental test of a two
‑
stage kalman filter for actuator fault detection and diagnosis of an unmanned quadrotor helicopter》中,作者设计了分级的卡尔曼滤波器,用于对执行器的故障进行检测和识别。在论文《quadrotor actuator fault diagnosis and accommodation using nonlinear adaptive estimators》中,作者设计了一组非线性自适应故障隔离估计器,用于四旋翼执行器的故障估计。在论文《active fault tolerant control of quadrotor uav using sliding mode control》中,作者采用滑模控制技术开发了一种主动容错控制方案。现有的针对执行器的主动容错控制框架中,关于故障评估和主动容错控制的方法都没有考虑工程实际存在的模型不确定性和故障评估的误差。
技术实现要素:
5.为解决现有技术存在的问题,本发明提出一种考虑电机故障的四旋翼无人机智能容错控制方法,该方法基于自适应滑模控制和递归神经网络,考虑了有界的外部干扰和传感器噪声,量化了四旋翼无人机各个电机的故障程度,并以电机操纵效率变化的形式考虑到非线性模型中。针对无人机转动惯量和飞行阻力不确定问题设计自适应滑模控制系统,然后通过将一组并联的递归神经网络设计为故障识别器,实现了快速而准确的故障特征提取、故障评级和故障隔离。所设计的主动容错控制策略可以在线自适应地产生适当的控制
信号来补偿模型的不确定性从而保持四旋翼无人机的跟踪性能和稳定性,同时递归神经网络将与自适应滑模控制相互配合,完成故障后控制器的重新配置从而实现主动容错控制,保障无人机的飞行安全。
6.本发明的技术方案为:
7.一种考虑电机故障的四旋翼无人机智能容错控制方法,包括如下步骤:
8.步骤1,考虑四旋翼无人机本体转动惯量不确定、飞行过程中阻力不确定、传感器测量误差和复杂外界环境干扰,建立包含电机故障参数的非线性动力学模型;
9.步骤2:构建传感器测量误差、复杂外界环境干扰和电机故障参数的显式表达,;
10.步骤3:针对四旋翼飞行过程中的不确定和干扰,设计自适应滑模控制器,实现控制器在线自适应补偿模型不确定和干扰保证无人机的稳定性和指令跟踪性能;
11.步骤4:针对四旋翼无人机的不同电机设计递归神经网络故障估计器,不同故障估计器并联形成故障估计模块;
12.步骤5:通过自适应滑模控制器与故障估计器相结合,将四旋翼无人机电机故障严重程度进行参数化,同时实现电机故障后的故障特征提取、故障等级评估、故障电机隔离与控制方法重构,实现电机故障情况下的四旋翼无人机的安全飞行。
13.进一步的,步骤1具体如下:
14.考虑四旋翼无人机本体转动惯量不确定、飞行过程中阻力不确定、传感器测量误差和复杂外界环境干扰,建立包含电机故障参数的非线性动力学模型,表示如下:
[0015][0016]
其参数定义如下:[φ θ ψ]
t
代表无人机在地面固定坐标系下的欧拉角,其中φ代表滚转角,θ代表俯仰角,ψ代表偏航角;[i
xx i
yy i
zz
]
t
分别代表飞机沿机体坐标系下三个坐标轴的惯性矩;k
u
为一大于零的系数,代表旋翼产生气动力的增益;k
y
为一大于零的系数,代表旋翼产生反扭矩的增益;l
d
代表旋翼电机旋转轴线与四旋翼无人重心之间的距离;k
i
(i=1,2,3)代表飞机飞行过程中的阻力系数;u
i
(i=1,2,3,4)代表输入给旋翼电机的脉宽信号值。
[0017]
进一步的,步骤2具体如下:
[0018]
将无人机的非线性动力学模型写为积分链的形式并将模型不确定性、外界干扰、传感器噪声和电机故障参数显式表达,表示如下:
[0019][0020][0021]
y(t)=cx(t) w(t)
[0022]
式中是系统的状态向量;是系统的输出向
量;是系统的控制输入变量;为对角矩阵;为控制效率矩阵;向量是系统的非线性项,其中包括模型边界未知的模型不确定;代表边界已知的外界干扰;代表传感器噪声;l
c
(t)=diag([l
c1
(t),l
c2
(t),
…
,l
cm
(t)])代表电机控制有效等级,l
cj
(t)(j=1,2,
…
,m)的变化范围满足0≤l
cj
(t)≤1,l
cj
(t)=1代表第j个电机具有正常的工作能力,l
cj
(t)=0代表第j个电机完全故障。
[0023]
进一步的,步骤3具体如下:
[0024]
为了进行状态反馈控制器的设计,将系统的状态变量定义为非线性系统可以改写为如下形式:
[0025][0026][0027]
v
i
=b
ui
l
c
u
i
[0028]
式中i=1,2,3分别代表三个子系统;系统的两个状态量分别为飞机的欧拉角和角速度x
2i
‑1=[φ θ ψ]
t
,
[0029]
定义为状态变量的期望值,那么跟踪误差向量可以定义为为状态变量的期望值,那么跟踪误差向量可以定义为结合跟踪误差,系统的积分滑模面可以被设计为如下形式:
[0030][0031]
其中t0是系统的初始状态对应的时刻,k
c1i
和k
c2i
为设计参数,该参数为霍尔维茨多项式p2 k
c2i
p k
c1i
的系数,其中p为拉普拉斯算子,并满足p2 k
c2i
p k
c1i
=0的根具有负实部。对于任意常数a>0,(p a)2=0可以写为多项式p2 2ap a2=0,因此k
c1i
和k
c2i
可以设计为k
c1i
=a2,k
c2i
=2a。
[0032]
当滑模面设计完成后继续进行控制律设计,使得滑动变量能够到达滑模面并保持在滑模面附近。因此,对应的控制律可以设计为如下形式:
[0033]
v
i
=v
i0
v
i1
[0034]
其中v
i0
代表控制律中的连续变量部分,用于稳定无不确定和干扰条件下的系统;v
i1
为控制律中非连续的变量,用于补偿系统的扰动保证系统的滑动模态;
[0035]
通过令可以获得控制律中的连续变量部分v
i0
,该过程中忽略了外界干扰d
i
,具体可表示为如下形式:
[0036][0037]
在此基础上,继续设计针对扰动d
i
的非连续控制变量,具体可表示为如下形式:
[0038]
v
i1
=
‑
k
c3i
sat(σ
i
)
[0039]
其中k
c3i
为一大于零的高增益系数,其使得系统的状态趋向于保持在滑模面附近,其中的sat函数可以表示为如下形式:
[0040][0041]
其中φ
i
为一大于零的数值代表边界层的厚度。
[0042]
因此,在不考虑电机故障和模型不确定的情况下,系统的控制律可以写为如下形式:
[0043][0044]
其中代表控制效能矩阵的伪逆。
[0045]
进而继续考虑模型不确定,在此之前需要引入对应的估计参数和为了充分利用滑模控制非连续的控制策略,使用估计变量与k
c3i
共同自适应调整替代了传统单一调整k
c3i
的策略;定义自适应变量和然后可以将控制律写为如下形式:
[0046][0047]
其中使用在线自适应算法估计的不确定参数可以设计为:
[0048][0049][0050][0051]
其中σ
δi
=σ
i
‑
φ
i
sat(σ
i
)为当前滑动变量与边界层之间的几何距离。
[0052]
进一步的,步骤4具体如下:
[0053]
为了有效评估每个电机执行器故障的严重程度,采用了一组并联的递归神经网络作为故障识别器。针对四旋翼无人机则分别为四个电机设计了单独递归神经网络,能够实现快速可靠的在线评估电机的故障严重程度,该方案较单一神经网络性能有显著改善。使用过程中将系统的输入指令与系统输出之间的误差以及执行器的控制输入作为递归神经网络的输入,每个神经网络输出所估计的电机故障严重程度,并用其控制有效水平进行表达。
[0054]
所应用的递归神经网络结构如图2所示,其具有两个隐含层,第一隐含层的输出反馈形成联接层,因此所应用的递归神经网络针对输入向量u(k)=[u
n1
(k),u
n2
(k),
…
,u
nr
(k)]
t
的一般动力学响应可以表示为:
[0055][0056][0057]
y(k 1)=w
o
x
h2
(k 1)
[0058]
其中代表递归神经网络的输入,代表第一隐含层在时间点k 1时的输出向量,代表第二隐含层的输出向量,y(k 1)代表递
归神经网络的输出向量,和分别代表输入层与第一隐含层、第一隐含层与第二隐含层和第二隐含层与输入层之间的加权矩阵,和分别代表第一隐含层和第二隐含层之间的激活函数;
[0059]
在训练神经网络的过程中,设计了一种基于时间逆传播的扩展卡尔曼滤波器。考虑所设计的具有s个神经元连接点权值和q个输出节点的递归神经网络,将k表示为递归神经网络监督训练过程中的一个时刻,将此时刻递归神经网络中各神经元连接点的加权值用向量w
k
表示。通过将第一隐含层中与第一个神经元相关的所有加权值进行叠加,然后叠加第二个神经元。随后进行相同的步骤,直到第一隐含层中的所有神经元全部完成相同步骤为止。随后对网络中的第二隐含层和输出层应用相同的步骤,以相同的顺序将权值叠加至向量w
k
中。因此,选择w
k
作为递归神经网络的状态,则网络的状态空间模型可以被定义为:
[0060]
w
k 1
=w
k
ω
k
[0061]
d
k
=f(w
k
,v
k
,u
k
) v
k
[0062]
其中u
k
是应用于神经网络的输入信号,v
k
是用于表示网络活跃度的网络内部状态,动态噪声ω
k
和测量噪声v
k
分别为均值为零分布的不相关高斯噪声矩阵和f代表递归神经网络内部的整体非线性函数,是期望输出。
[0063]
针对网络的非线性测量模型,提出了一种基于时间逆传播的扩展卡尔曼滤波器训练算法。为了实现扩展卡尔曼滤波训练算法,需要对测量模型进行线性化,用泰勒级数展开,可以近似为:
[0064]
w
k 1
=w
k
ω
k
[0065][0066]
式中是线性化模型的测量矩阵,可以写作:
[0067][0068]
q和s分别代表输出神经元的数量和连接点的加权值,y
i
(i=1,2,
…
,q)代表第i个输出神经元。矩阵f
k
的详细计算方式如下所示:
[0069]
对于其中和的计算方法如下:
[0070][0071]
[0072][0073]
对于给定的训练样本对于k=1,2,
…
,n,递归神经网络加权参数按如下方式更新:
[0074][0075][0076][0077][0078]
p
k|k
=p
k|k
‑1‑
g
k
f
k
p
k|k
‑1[0079]
p
k 1|k
=p
k|k
q
ω,k
[0080]
取初值为:
[0081][0082]
p
1|0
=δ
‑1i
[0083]
其中是加权向量w
k
的预测估计,是加权向量w
k
的滤波估计,是卡尔曼增益矩阵。是预测误差的协方差矩阵,是滤波误差的协方差矩阵。η
k
是学习速率,δ为一大于零的小值,为单位矩阵。
[0084]
进一步的,步骤5具体如下:
[0085]
通过应用电机控制有效等级的估计值最终控制律可以设计为:
[0086][0087]
考虑到电机故障的估计误差实际产生的虚拟控制输入可以写为:其中v
id
是自适应滑模控制器产生的虚拟控制量。
[0088]
接下来,定义并将其于带入系统的表达式中,可以得到如下等式:
[0089][0090]
因此,利用估计值可以在不影响控制器跟踪性能的情况下补偿电机故障的估计误差。
[0091]
有益效果
[0092]
本发明提出一种考虑四旋翼无人机电机故障后的智能容错姿态控制方法,可以解决四旋翼无人机面对外部干扰、模型不确定甚至电机故障后带来的无人机姿态控制的难题。
[0093]
本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
[0094]
本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
[0095]
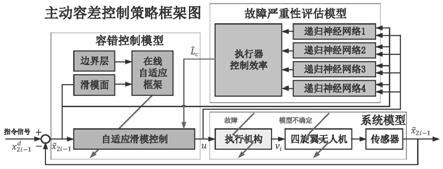
图1:主动容差控制策略框架图;
[0096]
图2:递归神经网络结构图。
具体实施方式
[0097]
下面详细描述本发明的实施例,所述实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
[0098]
本实施例中的一种考虑电机故障的四旋翼无人机智能容错控制方法,包括如下步骤:
[0099]
步骤1,考虑四旋翼无人机本体转动惯量不确定、飞行过程中阻力不确定、传感器测量误差和复杂外界环境干扰,建立包含电机故障参数的非线性动力学模型;
[0100]
表示如下:
[0101][0102]
其参数定义如下:[φ θ ψ]
t
代表无人机在地面固定坐标系下的欧拉角,其中φ代表滚转角,θ代表俯仰角,ψ代表偏航角;[i
xx i
yy i
zz
]
t
分别代表飞机沿机体坐标系下三个坐标轴的惯性矩;k
u
为一大于零的系数,代表旋翼产生气动力的增益;k
y
为一大于零的系数,代表旋翼产生反扭矩的增益;l
d
代表旋翼电机旋转轴线与四旋翼无人重心之间的距离;k
i
(i=1,2,3)代表飞机飞行过程中的阻力系数;u
i
(i=1,2,3,4)代表输入给旋翼电机的脉宽信号值。
[0103]
步骤2:进行问题陈述,构建传感器测量误差、复杂外界环境干扰和电机故障参数等的显式表达,为自适应滑模控制器和递归神经网络故障估计器的设计完成准备工作;
[0104]
将无人机的非线性动力学模型写为积分链的形式并将模型不确定性、外界干扰、传感器噪声和电机故障参数显式表达,表示如下:
[0105][0106][0107]
y(t)=cx(t) w(t)
[0108]
式中是系统的状态向量;是系统的输出向量;是系统的控制输入变量;为对角矩阵;为控制效率矩阵;向量是系统的非线性项,其中包括模型边界未知的模型不确定;代表边界已知的外界干扰;代表传感器噪声;l
c
(t)=diag([l
c1
(t),l
c2
(t),
…
,l
cm
(t)])代表电机控制有效等级,l
cj
(t)(j=1,2,
…
,m)的变化范围满足0≤l
cj
(t)≤1,l
cj
(t)=1代表第j个电机具有正常的工作能力,l
cj
(t)=0代表第j个电机完全故障。
[0109]
步骤3:针对四旋翼飞行过程中的不确定和干扰,设计自适应滑模控制器,实现控制器在线自适应补偿模型不确定和干扰保证无人机的稳定性和指令跟踪性能;
[0110]
为了进行状态反馈控制器的设计,将系统的状态变量定义为非线性系统可以改写为如下形式:
[0111][0112][0113]
v
i
=b
ui
l
c
u
i
[0114]
式中i=1,2,3分别代表三个子系统;系统的两个状态量分别为飞机的欧拉角和角速度x
2i
‑1=[φ θ ψ]
t
,
[0115]
定义为状态变量的期望值,那么跟踪误差向量可以定义为为状态变量的期望值,那么跟踪误差向量可以定义为结合跟踪误差,系统的积分滑模面可以被设计为如下形式:
[0116][0117]
其中t0是系统的初始状态对应的时刻,k
c1i
和k
c2i
为设计参数,该参数为霍尔维茨多项式p2 k
c2i
p k
c1i
的系数,其中p为拉普拉斯算子,并满足p2 k
c2i
p k
c1i
=0的根具有负实部。对于任意常数a>0,(p a)2=0可以写为多项式p2 2ap a2=0,因此k
c1i
和k
c2i
可以设计为k
c1i
=a2,k
c2i
=2a。
[0118]
当滑模面设计完成后继续进行控制律设计,使得滑动变量能够到达滑模面并保持在滑模面附近。因此,对应的控制律可以设计为如下形式:
[0119]
v
i
=v
i0
v
i1
[0120]
其中v
i0
代表控制律中的连续变量部分,用于稳定无不确定和干扰条件下的系统;v
i1
为控制律中非连续的变量,用于补偿系统的扰动保证系统的滑动模态;
[0121]
通过令可以获得控制律中的连续变量部分v
i0
,该过程中忽略了外界干扰d
i
,具体可表示为如下形式:
[0122][0123]
在此基础上,继续设计针对扰动d
i
的非连续控制变量,具体可表示为如下形式:
[0124]
v
i1
=
‑
k
c3i
sat(σ
i
)
[0125]
其中k
c3i
为一大于零的高增益系数,其使得系统的状态趋向于保持在滑模面附近,其中的sat函数可以表示为如下形式:
[0126][0127]
其中φ
i
为一大于零的数值代表边界层的厚度。
[0128]
因此,在不考虑电机故障和模型不确定的情况下,系统的控制律可以写为如下形式:
[0129][0130]
其中代表控制效能矩阵的伪逆。
[0131]
进而继续考虑模型不确定,在此之前需要引入对应的估计参数和为了充分利用滑模控制非连续的控制策略,使用估计变量与k
c3i
共同自适应调整替代了传统单一调整k
c3i
的策略;定义自适应变量和然后可以将控制律写为如下形式:
[0132][0133]
其中使用在线自适应算法估计的不确定参数可以设计为:
[0134][0135][0136][0137]
其中σ
δi
=σ
i
‑
φ
i
sat(σ
i
)为当前滑动变量与边界层之间的几何距离。
[0138]
步骤4:针对四旋翼无人机的不同电机设计递归神经网络故障估计器,不同故障估计器并联形成故障估计模块;
[0139]
为了有效评估每个电机执行器故障的严重程度,采用了一组并联的递归神经网络作为故障识别器。针对四旋翼无人机则分别为四个电机设计了单独递归神经网络,能够实现快速可靠的在线评估电机的故障严重程度,该方案较单一神经网络性能有显著改善。使用过程中将系统的输入指令与系统输出之间的误差以及执行器的控制输入作为递归神经网络的输入,每个神经网络输出所估计的电机故障严重程度,并用其控制有效水平进行表达。
[0140]
所应用的递归神经网络结构如图2所示,其具有两个隐含层,第一隐含层的输出反馈形成联接层,因此所应用的递归神经网络针对输入向量u(k)=[u
n1
(k),u
n2
(k),
…
,u
nr
(k)]
t
的一般动力学响应可以表示为:
[0141][0142][0143]
y(k 1)=w
o
x
h2
(k 1)
[0144]
其中代表递归神经网络的输入,代表第一隐含层在时间点k 1时的输出向量,代表第二隐含层的输出向量,y(k 1)代表递归神经网络的输出向量,和分别代表输入层与第一隐含层、第一隐含层与第二隐含层和第二隐含层与输入层之间的加权矩阵,和分别代表第一隐含层和第二隐含层之间的激活函数;
[0145]
在训练神经网络的过程中,设计了一种基于时间逆传播的扩展卡尔曼滤波器。考虑所设计的具有s个神经元连接点权值和q个输出节点的递归神经网络,通过将k表示为递归神经网络监督训练过程中的一个时刻,将此时刻递归神经网络中各神经元连接点的加权值用向量w
k
表示。通过将第一隐含层中与第一个神经元相关的所有加权值进行叠加,然后叠加第二个神经元。随后进行相同的步骤,直到第一隐含层中的所有神经元全部完成相同步骤为止。随后对网络中的第二隐含层和输出层应用相同的步骤,以相同的顺序将权值叠加至向量w
k
中。因此,选择w
k
作为递归神经网络的状态,则网络的状态空间模型可以被定义为:
[0146]
w
k 1
=w
k
ω
k
[0147]
d
k
=f(w
k
,v
k
,u
k
) v
k
[0148]
其中u
k
是应用于神经网络的输入信号,v
k
是用于表示网络活跃度的网络内部状态,
动态噪声ω
k
和测量噪声v
k
分别为均值为零分布的不相关高斯噪声矩阵和f代表递归神经网络内部的整体非线性函数,是期望输出。
[0149]
针对网络的非线性测量模型,提出了一种基于时间反向传播的扩展卡尔曼滤波器训练算法。为了实现扩展卡尔曼滤波训练算法,需要对测量模型进行线性化,用泰勒级数展开,可以近似为:
[0150]
w
k 1
=w
k
ω
k
[0151][0152]
式中是线性化模型的测量矩阵,可以写作:
[0153][0154]
q和s分别代表输出神经元的数量和连接点的加权值,y
i
(i=1,2,
…
,q)代表第i个输出神经元。矩阵f
k
的详细计算方式如下所示:
[0155]
对于其中和的计算方法如下:
[0156][0157]
[0166]
p
k 1|k
=p
k|k
q
ω,k
[0167]
取初值为:
[0168][0169]
p
1|0
=δ
‑1i
[0170]
其中是加权向量w
k
的预测估计,是加权向量w
k
的滤波估计,是卡尔曼增益矩阵。是预测误差的协方差矩阵,是滤波误差的协方差矩阵。η
k
是学习速率,δ为一大于零的小值,为单位矩阵。
[0171]
步骤5:通过自适应滑模控制器与故障估计器相结合,将四旋翼无人机电机故障严重程度进行参数化,同时实现电机故障后的故障特征提取、故障等级评估、故障电机隔离与控制方法重构,实现电机故障情况下的四旋翼无人机的安全飞行。
[0172]
通过应用电机控制有效等级的估计值最终控制律可以设计为:
[0173][0174]
考虑到电机故障的估计误差实际产生的虚拟控制输入可以写为:其中v
id
是自适应滑模控制器产生的虚拟控制量。
[0175]
接下来,定义并将其于带入系统的表达式中,可以得到如下等式:
[0176][0177][0178]
因此,利用估计值可以在不影响控制器跟踪性能的情况下补偿电机故障的估计误差。
[0179]
基于反向时间传播的扩展卡尔曼滤波训练程序伪代码为:
[0180]
[0181][0182]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在不脱离本发明的原理和宗旨的情况下在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。