一种基于nb
‑
iot的电动式爬架智能监测系统
技术领域
1.本实用新型属于建筑施工技术领域,涉及一种基于nb
‑
iot的电动式爬架智能监测系统。
背景技术:
2.nb
‑
iot(窄带物联网,narrow band internet of things)技术依托电信运营商传统蜂窝网络建立而成,信道上行采用sc—fdma通信调制方式,下行采用ofdma通信调制方式,信号发射功率为3dbm,可实现在现有电信网络的平滑升级,快速实现全面网络覆盖。信道占用带宽200khz,可直接部署于gsm网络、umts网络或者tle网络,信道有独立部署、带内部署、边带部署三种不同的部署方式。nb
‑
iot技术的广覆盖、高可靠性、高安全性、低成本、低功耗等特点,能够从根本上解决工业监测领域的诸多问题。基于nb
‑
iot超低功耗远程传输应用架构主要由带nb
‑
iot通信模组的监测终端、nb
‑
iot 通信基站、物联网云平台、业务服务器、客户端管理软件等构成。
3.近年来,随着我国经济建设的迅速发展,高层及超高层建筑越来越多高层建筑脚手架施工中,传统做法是搭设落地式钢管脚手架或者是悬挑脚手架,过这些架体一般不安全或者不经济。附着升降式脚手架又称爬架,它的出现很好的改变了这种局面,现在在高层建筑脚手架施工中爬架得到了迅速应用,取得了良好的经济效益和社会效益。
4.在爬架设计中,其安全性和适用性是产品的最基本的要求。爬架的安全性主要包括:爬架附着可靠性,在施工状态下对额定施工荷载及风载影响下的安全度;在升降状态下爬架运行的同步性、稳定性;在不安全因素发生时(如动力失效等),对运行中爬架的可监测和防倾防坠保障。
5.具备nb
‑
iot通信功能的监测终端部署于工程现场后,监测终端会自动搜寻附近的 nb
‑
iot通信基站,然后凭借基站信号注册到物联网云平台,该设备将上报和接收的数据汇报给物联网云平台,物联网云平台通过通信基站接收监测终端上传的状态数据,云平台的控制数据包发送到监测终端。客户端管理软件通过业务服务器从云平台获取实时采集的电控柜状态及环境数据,监控工程现场的实时用电情况和现场环境及预警。
技术实现要素:
6.本实用新型的目的在于如何设计一种基于nb
‑
iot的电动式爬架智能监测系统,实时对运行中电动式爬架进行监测和防倾、防坠报警提示。
7.本实用新型是通过以下技术方案解决上述技术问题的:
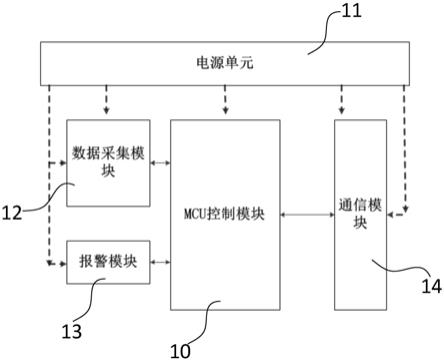
8.一种基于nb
‑
iot的电动式爬架智能监测系统,包括:mcu控制模块(10)、电源单元(11)、数据采集模块(12)、报警模块(13)、通信模块(14);所述mcu控制模块(10)包括主控mcu芯片(u3),所述的主控mcu芯片(u3)分别与电源单元(11)、数据采集模块(12)、报警模块(13)、nb通信模块(14)连接;所述的电源单元(11) 分别与数据采集模块(12)、报警模块(13)、nb通信模块(14)连接;所述的数据采集模块(12)与报警模块(13)两者之间相互连接。
9.本实用新型的基于nb
‑
iot的电动式爬架智能监测系统的结构简单,通信模块(14) 采用nb
‑
iot技术,信号覆盖范围广、高可靠性、高安全性、低成本、低功耗等特点,能够实时对运行中电动式爬架进行监测和防倾、防坠报警提示。
10.作为本实用新型技术方案的进一步改进,所述的主控mcu芯片(u3)的采用stm公司旗下主流的基础型f1系列芯片,具体型号为stm32f103rct6。
11.作为本实用新型技术方案的进一步改进,所述的数据采集模块(12)包括拉力物理量采集单元以及倾斜物理量采集单元;所述的拉力物理量采集单元包括高精度ad转换芯片(u5),所述的高精度ad转换芯片(u5)的2#引脚、1#引脚、9#引脚、10#引脚分别与主控mcu芯片(u3)的pb5引脚、pb4引脚、pb3引脚、pc12引脚相连接。
12.作为本实用新型技术方案的进一步改进,所述的高精度ad转换芯片(u5)的型号为ads1118idgsr。
13.作为本实用新型技术方案的进一步改进,所述的倾斜物理量采集单元包括rs485通讯接口芯片(u6),所述的rs485通讯接口芯片(u6)的1#引脚、3#引脚、4#引脚分别与主控mcu芯片(u3)的pa1引脚、pa2引脚、pa3引脚连接。
14.作为本实用新型技术方案的进一步改进,所述的rs485通讯接口芯片u6的型号为 sn65hvd12d。
15.作为本实用新型技术方案的进一步改进,所述的报警模块(13)包括mp3音频模块 (u2),所述的mp3音频模块(u2)的28#引脚(so)、29#引脚(si)、30#引脚(sclk)、 9#引脚(gpio2)、10#引脚(gpio3)、1#引脚(micp)、2#引脚(micn)、3#引脚(xreset) 分别与主控mcu芯片(u3)的pa5引脚、pa7引脚、pa6引脚、pc5引脚、pb0引脚、pb1 引脚、pb12引脚、pc4引脚连接。
16.作为本实用新型技术方案的进一步改进,所述的mp3音频模块(u2)的型号为 vs1003b
‑
l。
17.作为本实用新型技术方案的进一步改进,所述的通信模块(14)包括nb通信芯片 (u1),所述的nb通信芯片(u1)的23#引脚(uart1_rx)、24#引脚(uart1_tx)、 5#引脚(power_on#)、80#引脚(reset#)引脚分别与主控mcu芯片(u3)的pa9引脚、 pa10、pc8引脚、pc9引脚连接。
18.作为本实用新型技术方案的进一步改进,所述的nb通信芯片(u1)的型号为联想 c1100模块。
19.本实用新型的优点在于:
20.(1)本实用新型的基于nb
‑
iot的电动式爬架智能监测系统的结构简单,通信模块 (14)采用nb
‑
iot技术,信号覆盖范围广、高可靠性、高安全性、低成本、低功耗等特点,能够实时对运行中电动式爬架进行监测和防倾、防坠报警提示。
21.(2)主控mcu芯片具有64个引脚、lqfp64封装、拥有256kb的flash内存、48kb 的ram内存、主频最高可达72mhz;
22.(3)高精度ad转换芯片具有内部基准和温度传感器的兼容spi的16位模数转换的特点;
23.(4)通信模块(14)采用的nb通信芯片(u1)的型号为联想c1100模块,该模块兼容nb网络与gprs网络,还自带gps定位功,通用性强。
附图说明
24.图1是本实用新型实施例的基于nb
‑
iot的电动式爬架智能监测系统的结构图;
25.图2(a)是本实用新型实施例的基于nb
‑
iot的电动式爬架智能监测系统的mcu控制模块电路原理图一;
26.图2(b)是本实用新型实施例的基于nb
‑
iot的电动式爬架智能监测系统的mcu控制模块电路原理图二;
27.图3(a)是本实用新型实施例的基于nb
‑
iot的电动式爬架智能监测系统的数据采集模块电路原理图一;
28.图3(b)是本实用新型实施例的基于nb
‑
iot的电动式爬架智能监测系统的数据采集模块电路原理图二;
29.图3(c)是本实用新型实施例的基于nb
‑
iot的电动式爬架智能监测系统的数据采集模块电路原理图三;
30.图4是本实用新型实施例的基于nb
‑
iot的电动式爬架智能监测系统的报警模块电路原理图;
31.图5(a)是本实用新型实施例的基于nb
‑
iot的电动式爬架智能监测系统的通信模块电路原理图一;
32.图5(b)是本实用新型实施例的基于nb
‑
iot的电动式爬架智能监测系统的通信模块电路原理图二;
33.图5(c)是本实用新型实施例的基于nb
‑
iot的电动式爬架智能监测系统的通信模块电路原理图三;
34.图5(d)是本实用新型实施例的基于nb
‑
iot的电动式爬架智能监测系统的通信模块电路原理图四;
35.图5(e)是本实用新型实施例的基于nb
‑
iot的电动式爬架智能监测系统的通信模块电路原理图五;
36.图6(a)是本实用新型实施例的基于nb
‑
iot的电动式爬架智能监测系统的电源单元电路原理图一;
37.图6(b)是本实用新型实施例的基于nb
‑
iot的电动式爬架智能监测系统的电源单元电路原理图二。
具体实施方式
38.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
39.下面结合说明书附图以及具体的实施例对本实用新型的技术方案作进一步描述:
40.实施例一
41.如图1所示,一种基于nb
‑
iot的电动式爬架智能监测系统,包括:mcu控制模块 10、电源单元11、数据采集模块12、报警模块13、通信模块14;所述的mcu控制模块 10分别与电
源单元11、数据采集模块12、报警模块13、nb通信模块14连接;所述的电源单元11分别与数据采集模块12、报警模块13、nb通信模块14连接;所述的数据采集模块12与报警模块13两者之间相互连接。
42.如图2(a)
‑
2(b)所示的mcu控制模块电路原理图,所述mcu控制模块10包括主控mcu芯片u3,主控mcu芯片u3的采用stm公司旗下主流的基础型f1系列芯片,具体型号为stm32f103rct6,该芯片具有64个引脚、lqfp64封装、拥有256kb的flash内存、48kb的ram内存、主频最高可达72mhz。
43.如图3(a)
‑
3(c)所示的数据采集模块电路原理图,所述的数据采集模块12包括拉力物理量采集单元以及倾斜物理量采集单元。如图3(a)和3(b)所示,所述的拉力物理量采集单元包括高精度ad转换芯片u5,所述的高精度ad转换芯片u5的型号为: ads1118idgsr,该芯片具有内部基准和温度传感器的兼容spi的16位模数转换,所述的高精度ad转换芯片u5的2#引脚、1#引脚、9#引脚、10#引脚分别与主控mcu芯片u3 的pb5引脚、pb4引脚、pb3引脚、pc12引脚相连接,实现拉力数据的扫描采集。如图 3(c)所示,所述的倾斜物理量采集单元包括rs485通讯接口芯片u6,所述的rs485 通讯接口芯片u6的型号为:sn65hvd12d,所述的rs485通讯接口芯片u6的1#引脚、3# 引脚、4#引脚分别与主控mcu芯片u3的pa1引脚、pa2引脚、pa3引脚连接,用于将采集到的倾斜仪输出的485信号输入到主控mcu芯片u3中。
44.如图4所示的报警模块电路原理图,所述的报警模块13采用vs1003b
‑
l型号的mp3 音频模块u2,所述的mp3音频模块u2的28#引脚so、29#引脚si、30#引脚sclk、9# 引脚gpio2、10#引脚gpio3、1#引脚micp、2#引脚micn、3#引脚xreset分别与主控mcu 芯片u3的pa5引脚、pa7引脚、pa6引脚、pc5引脚、pb0引脚、pb1引脚、pb12引脚、 pc4引脚连接,实现不同情况下的不同语音报警。
45.如图5(a)
‑
(e)所示的通信模块电路原理图,所述的通信模块14采用的nb通信芯片u1的型号为联想c1100模块,该模块兼容nb网络与gprs网络,还自带gps定位功;所述的nb通信芯片u1的23#引脚uart1_rx、24#引脚uart1_tx、5#引脚power_on#、 80#引脚reset#引脚分别与主控mcu芯片u3的pa9引脚、pa10、pc8引脚、pc9引脚连接,用于控制通信模块开机和复位。
46.如图6(a)
‑
(b)所示的电源单元电路原理图,所述的电源单元11包括:电源模块源管理芯片、电源开关芯片、电源适配器组成;电源单元11通过多种电源芯片实现输入3.7v电源电压,转换为各模块使用的3.3v和12v电压,此外还设计有电源充电芯片,可给电池充电,并通过电源开关芯片实现在设备休眠状态下关闭传感器单元和通信单元的供电,从而达到低功耗。整个设备的供电由可充电锂电池提供,通过电源管理设计以及运行流程设计,设备可持续工作数月。
47.基于nb
‑
iot的电动式爬架智能监测系统的工作流程如下:将设备按照使用流程接好电源线与信号线,由于其电源是通过电动式爬架取电的,所以只有等爬架开始工作时该监测才开始工作;当爬架开始启动工作;上电稳定一段时间后,倾斜传感器和拉力传感器会开始工作,其状态会随现场爬架的实际情况而改变,并实时等待监测终端的采集;监测终端会根据内部的时钟进行计时,计时达到采集频率即发送采集指令进行数据采集,采集数据后进行提取、计算、处理、分析等步骤,并在mcu中控模块内部判断是否需要报警,若需要则驱动报警模块进行语音报警,并通过通信模块将数据上传至服务器后台进行展示和存储,
若不需要则直接上传展示和存储。其中采集频率可以根据现场的实际情况进行更改,更改方式通过服务器下发指令,mcu中控模块接收并解析和执行,更改后的频率需要再下一个周期中执行。
48.以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

