1.本实用新型涉及应用于工业机器人的减速器领域,具体是涉及一种基于滚动螺旋传动的减速器。
背景技术:
2.随着科技的发展,人们对工业机器人的传动精度、承载能力等性能指标的要求越来越高。机器人用的减速器作为机械传动部件主要位于关节处,通常机器人各关节的转动范围是固定的,机器人工作质量的好坏主要取决于关节减速器。目前,机器人关节减速器应用最多的是谐波减速器和rv减速器。其中谐波减速器主要应用于机器人的腕关节,肘关节和小臂关节,而rv减速器主要应用在腰和大臂等承载能力要求高的关节。
3.滚动螺旋传动原理与滚珠丝杠类似,其典型应用是行星滚柱丝杠,它能将旋转运动转化为直线移动,也能将直线移动转化为旋转运动,其传动方式与众不同,在主螺纹丝杠的周围行星分布数个螺纹滚柱,当丝杠相对螺母转动时螺纹滚柱在丝杠和螺母之间滚动,以滚动摩擦代替滑动摩擦,其传动效率与滚珠丝杠的效率相当。滚动螺旋传动与滚珠丝杠相比具有如下特点:1、由于滚动螺旋传动是线接触,相同尺寸条件下滚柱的接触曲率半径比滚珠丝杠大,因此滚动螺旋传动的接触变形更小,轴向刚度高,承载能力大且结构紧凑;2、传动速度快,由于滚珠丝杠的滚珠有循环装置,滚珠之间会前后追击,当速度达到一定值时,滚珠容易产生自旋滑动而增大摩擦,使效率下降,同时滚珠球之间容易发生碰撞,产生噪音,所以滚珠丝杠的最大转速不能太高,而对于滚动螺旋传动来说,滚柱之间不会发生前后干涉和碰撞,并且容易保证纯滚动,形成滚动摩擦,噪音低,效率高,转速更快;3、滚动螺旋传动在安装或维修时操作方便,因为多个滚柱总是与保持架成为整体,当丝杠旋出时,滚柱不会散落,安装时仍能满足精度要求,但是滚珠丝杠拆装时,滚珠容易掉落,并且很难达到原来的传动精度。
技术实现要素:
4.本实用新型的目的在于提供一种基于滚动螺旋传动的机器人精密减速器,该减速器能够实现将电机的正反转运动转化为在一定范围内的回转输出,且具有滚动螺旋传动的优越性能的。
5.为实现上述目的,本实用新型的技术方案是:一种基于滚动螺旋传动的机器人精密减速器,包括输入杆、保持架、一级螺纹滚柱、左旋螺母、右旋螺母、直线导轨结构、二级螺纹滚柱和输出螺母;
6.所述输入杆上设有两段不同螺旋方向的丝杠段,分别为左旋丝杠段和右旋丝杠段;
7.所述保持架在减速器工作时为不动的部件;
8.所述左旋螺母和右旋螺母分别包括有内螺纹和外螺纹,所述左旋螺母对应左旋丝杠段活动套设在输入杆外,所述右旋螺母对应右旋丝杆段活动套设在输入杆外;
9.所述一级螺纹滚柱分别在左旋螺母与左旋丝杠段以及右旋螺母与右旋丝杆段之间周向布设若干个,所述一级螺纹滚柱分别与左旋螺母或右旋螺母上的内螺纹以及左旋丝杠段或右旋丝杆段的螺纹对应啮合可达到滚动螺旋和轴向移动;
10.所述直线导轨结构设置在左旋螺母与保持架及右旋螺母与保持架之间用于左旋螺母或右旋螺母直线活动导向;
11.所述输出螺母对应左旋螺母和右旋螺母活动套设在外,所述输出螺母的内侧壁上设有两段不同螺旋方向的内螺纹段,分别为左旋内螺纹段和右旋内螺纹段,所述二级螺纹滚柱分别在左旋螺母与输出螺母的左旋内螺纹段以及右旋螺母与输出螺母的右旋内螺纹段之间周向布设若干个,所述二级螺纹滚柱分别与左旋螺母或右旋螺母上的外螺纹以及输出螺母的左旋螺纹段或右旋内螺纹段螺纹对应啮合可达到滚动螺旋和轴向移动;
12.所述左旋丝杠段、左旋螺母的内螺纹及两者之间的一级螺纹滚柱,以及右旋丝杠段、右旋螺母的内螺纹及两者之间的一级螺纹滚柱构成一级滚动螺旋传动;所述左旋螺母的外螺纹、输出螺母及两者之间的二级螺纹滚柱,以及右旋螺母的外螺纹、输出螺母及两者之间的二级螺纹滚柱构成二级滚动螺旋传动;所述一级滚动螺旋传动的螺纹导程小于二级滚动螺旋传动的螺纹导程。
13.所述直线导轨结构为所述左旋螺母和右旋螺母上分别在内螺纹与外螺纹之间轴向开设有导向孔,所述保持架设置有穿设在导向孔内的导轨,所述导轨与导向孔之间通过圆柱滚子滚动实现相对移动。
14.所述一级螺纹滚柱与输入杆的左旋丝杠段或右旋丝杠段之间还设有限位安装套,所述限位安装套为管段状结构,所述限位安装套上沿轴向间隔布设有若干个供各一级螺纹滚柱可滚动嵌入在内的条形传动通孔。
15.上述一种基于滚动螺旋传动的机器人精密减速器,其传动比计算方法是,设减速器的一级滚动螺旋传动的螺纹导程为q1,二级滚动螺旋传动的螺纹导程为 q2,左旋螺母、右旋螺母的移动速度为v,输入杆的转速为n1,输出螺母的的转速分别为n2,传动比为i,则有由滚动螺旋的传动特点可知通过上述两公式可得到传动比为
16.通过采用上述技术方案,本实用新型的有益效果是:上述机器人精密减速器当输入丝杠正转或反转时左旋螺母、右旋螺母做低速相向或背向移动,左旋螺母和右旋螺母受与保持架之间的直线导轨结构约束,各一级螺纹滚柱做行星滚动传动至左旋螺母、右旋螺母,左旋螺母、右旋螺母只能做直线运动形成直线滚动导轨传动,在左旋螺母和右旋螺母与输出螺母之间的各二级螺纹滚柱形成滚动螺旋传动,传动至左旋螺母和右旋螺母做相向和背向移动,当左旋螺母和右旋螺母做相向和背向移动时通过与输出螺母的左旋螺纹段或右旋内螺纹段传动从而在输出螺母上实现正转和反转,由于一级滚动螺旋传动的螺纹导程小于二级滚动螺旋传动的螺纹导程,也就是经过左旋螺母和右旋螺母的转换实现减速的目的。
17.综上本实用新型是基于滚动螺旋研制的一种新型机器人关节减速器,它的结构特点是将两级滚动螺旋在径向串联,实现的功能是把电机的正反转运动转化为在一定范围内
的回转输出,同时具有滚动螺旋传动的优越性能,在某些特定场合可替代机器人关节rv减速器使用。
附图说明
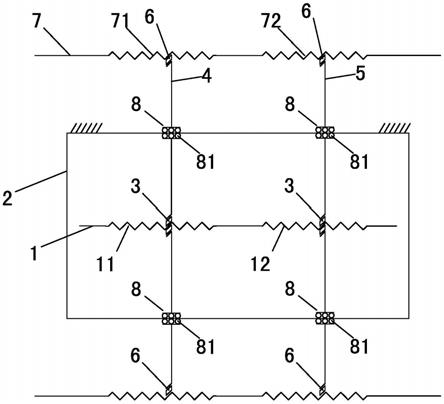
18.图1是本实用新型涉及的一种基于滚动螺旋传动的机器人精密减速器的传动原理图。
具体实施方式
19.为了进一步解释本实用新型的技术方案,下面通过具体实施例来对本实用新型进行详细阐述。
20.一种基于滚动螺旋传动的机器人精密减速器,如图1所示,包括输入杆1、保持架2、一级螺纹滚柱3、左旋螺母4、右旋螺母5、二级螺纹滚柱6、输出螺母7和直线导轨结构8,下面结合附图详细描述各部件的结构位置连接关系。
21.所述保持架2在减速器使用工作时为不动部件。
22.所述输入杆1的端部供与电机输出轴连接,如图中所示,所述输入杆1上设有两段不同螺旋方向的丝杠段,分别为左旋丝杠段11和右旋丝杠段12。
23.所述左旋螺母4和右旋螺母5分别包括有内螺纹和外螺纹,所述左旋螺母4 对应左旋丝杠段11活动套设在输入杆1外,所述右旋螺母5对应右旋丝杆段12 活动套设在输入杆12外。
24.所述一级螺纹滚柱3分别在左旋螺母4与左旋丝杠段11以及右旋螺母5与右旋丝杆段12之间周向布设若干个,所述一级螺纹滚柱3分别与左旋螺母4或右旋螺母5上的内螺纹以及左旋丝杠段11或右旋丝杆段12的螺纹对应啮合达到滚动螺旋和轴向移动;本实施例中所述一级螺纹滚柱3与输入杆1的左旋丝杠段11或右旋丝杠段12之间还可设有限位安装套,所述限位安装套为管段状结构,所述限位安装套上沿轴向间隔布设有若干个供各一级螺纹滚柱3可滚动嵌入在内的条形传动通孔,该结构设置可使得一级螺纹滚柱3一一对应嵌设在各条形传动通孔内保持一定距离互不干涉。
25.所述直线导轨结构8设置在左旋螺母4与保持架2及右旋螺母5与保持架2 之间用于左旋螺母4或右旋螺母5直线活动导向,本实施例中所述直线导轨结构8的结构可为所述左旋螺母4和右旋螺母5上分别在其内螺纹与外螺纹之间轴向开设有导向孔(图中未明示),所述保持架2设置有穿设在导向孔内的导轨 (图中未明示),所述导轨与导向孔之间通过圆柱滚子81滚动实现相对移动,即构成直线滚动导轨结构,可降低左旋螺母4和右旋螺母5与保持架2之间直线移动的摩擦阻力。
26.所述输出螺母7对应左旋螺母4和右旋螺母5活动套设在外,所述输出螺母7的内侧壁上设有两段不同螺旋方向的内螺纹段,分别为左旋内螺纹段71和右旋内螺纹段72。
27.所述二级螺纹滚柱6分别在左旋螺母4与输出螺母7的左旋内螺纹段71以及右旋螺母5与输出螺母7的右旋内螺纹段72之间周向布设若干个,所述二级螺纹滚柱6分别与左旋螺母4或右旋螺母5上的外螺纹以及输出螺母7的左旋内螺纹段71和右旋内螺纹段72的螺纹对应啮合达到滚动螺旋和轴向移动。
28.上述结构中丝杠段的螺纹头数可以根据需要确定,一级螺纹滚柱3在左旋螺母4和
右旋螺母5及输入杆1之间设置的个数以及二级螺纹滚柱6在左旋螺母4、右旋螺母5与输出螺母7之间设置的个数由承载能力和几何空间决定,上述结构中一级螺纹滚柱3和二级螺纹滚柱6的螺纹旋转方向为与其相啮合配合传动部件的螺纹为相应配合的螺纹旋转方向,这是螺纹传动实现的基础结构,本实施例中就不再详细描述和限定各螺纹啮合部件中螺纹结构的螺旋方向。由于保持架2在使用工作时不动的,一级螺纹滚柱3在左旋螺母4、右旋螺母5与输入杆1之间作行星滚动,传动至左旋螺母4和右旋螺母5时,两者在直线导轨结构的约束下只能做直线运动,传动形成直线滚动导轨传动的方式。
29.上述左旋丝杠段11、左旋螺母4的内螺纹及两者之间的一级螺纹滚柱3,以及右旋丝杠段12、右旋螺母5的内螺纹及两者之间的一级螺纹滚柱3构成一级滚动螺旋传动;所述左旋螺母4的外螺纹、输出螺母7及两者之间的二级螺纹滚柱6,以及右旋螺母5的外螺纹、输出螺母7及两者之间的二级螺纹滚柱6 构成二级滚动螺旋传动,从上述结构及附图可看出这两级的螺旋传动是径向串联传动的,通过这两级的传动且在本实用新型结构设置中左旋螺母4和右旋螺母5的动作传动方式下,把电机的正反转运动转化为在一定范围内的回转输出,这种结构设置在滚动螺旋传动中是一种新型的传动实现的结构设置,且本实用新型中一级滚动螺旋传动的螺纹导程小于二级滚动螺旋传动的螺纹导程,转速快的较小导程传动至较大导程输出时,则能够在输出体现出减速的效果,实现减速器的作用。
30.上述一种基于滚动螺旋传动的机器人精密减速器,其的传动比计算方法是,设减速器的一级滚动螺旋传动的螺纹导程为q1,二级滚动螺旋传动的螺纹导程为 q2,左旋螺母、右旋螺母的移动速度为v,输入杆的转速为n1,输出螺母的的转速分别为n2,传动比为i,则有由滚动螺旋的传动特点可知通过上述两公式可得到传动比为
31.通过上述传速比计算方法,可以看出本实用新型的减速器的传动比仅仅取决于两级滚动螺旋传动的导程大小,这也为设计减速器的传动比提供了理论依据。
32.上述实施例和图式并非限定本实用新型的产品形态和式样,任何所属技术领域的普通技术人员对其所做的适当变化或修饰,皆应视为不脱离本实用新型的专利范畴。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。