1.本发明涉及消防装备领域,具体说是一种用于森林火灾的消防投弹灭火机器人。
背景技术:
2.随着社会经济的飞速发展和科学技术的快速进步,人们对自然资源的需求越来越多。森林的生态价值和经济价值对于人们来说就显得更加重要。但是,火灾对于树木造成的烧毁,对环境造成的破坏,以及大火造成的无法估计的经济损失都是相当严重的。
3.森林灭火工作面临的很多问题都有待解决。其特点是覆盖面积大,火情发展迅速。传统灭火设备和灭火方案能力不足,目前人工灭火仍为主要方式,但是人工灭火方式危险性极高,传统灭火运用的消防装置和灭火器材只适用于短距离的灭火工作,而且对水源的要求很高。加上地形的复杂度和各种自然阻隔等原因,传统灭火器材并不能胜任,同时传统水枪、水炮等灭火范围和高度十分有限,只能处理100m高程内的火情。
4.在这种背景下,大剂量森林灭火弹、远程携带投掷发射系统成为了目前森林灭火的主要研究热点。因这种森林灭火方式可以针对人员无法接触的火灾,进行远距离的林火扑灭工作。当发生森林火灾时,由专业人员启动携带有灭火弹的灭火设备进入火灾场地,在指挥人员的统一调度下,进行灭火弹远程携带发射系统的调整和装填,然后向火灾区域发射投掷灭火弹。这样就可以在避免人员伤亡的情况下实现远距离的灭火,能够有效保证消防官兵的生命安全,同时也摆脱了对消防水源的需求。
技术实现要素:
5.为解决上述技术问题,本发明提出了一种用于森林火灾的消防投弹灭火机器人,该机器人满足森林消防要求,智能化程度高,动力性能强劲,越障性能良好,成本低廉,易于操作,故障率低。
6.本发明采用的技术方案是:一种用于森林火灾的消防投弹灭火机器人,该机器人由底盘系统、灭火弹存储组件、控制系统、发射系统、变位机构、旋转机构、托举机构和装填机构组成。所述灭火弹存储组件、控制系统分别与底盘系统连接;发射系统与变位机构连接,变位机构与底盘系统连接;旋转机构布置在变位机构的下方,与底盘系统连接;托举机构、装填机构分别与底盘系统连接。
7.所述底盘系统作为消防投弹灭火机器人各功能部件的搭载载体和运输系统,采用轮式行走机构,底盘系统内部包含有动力系统和传动机构。
8.所述灭火弹存储组件,其结构为立体多层式箱体结构,用于灭火弹的存放和运输过程中的保护。
9.所述控制系统为消防投弹灭火机器人整机的大脑,用于控制整台机器人的运行。
10.所述发射系统用于实现灭火弹的远距离发射,其自身具备减震器,可以吸收由于灭火弹发射产生的后坐力和后坐能量,不会将能量传递至机器人机体上面,避免和减少对机器人机体的损害。
11.所述包括变位机构根据火焰在空间维度上面的位置反馈,进行发射系统俯仰和回转调整,从而达到调整灭火弹发射炮口位置的目的,实现更好的灭火作业效果。
12.所述旋转机构用于装载灭火弹,并具有旋转功能;所述托举机构用于将灭火弹提升到发射系统灭火弹入口位置;所述装填机构用于装填灭火弹。通过旋转机构、托举机构和装填机构三种结构的协调动作,实现灭火弹的自动装填功能。
13.本发明的有益效果是:该机器人智能化程度高,动力性能强劲,越障性能良好,成本低廉,易于操作,故障率低,满足森林消防灭火要求。
附图说明
14.图1为本发明组成示意图;图2为本发明发射系统组成示意图;图3为本发明变位机构组成示意图;图4为本发明旋转机构组成示意图;图5为本发明托举机构组成示意图;图6为本发明装填机构组成示意图。
具体实施方式
15.下面结合附图和实施例对本发明做进一步说明。
16.如图1所示,一种用于森林火灾的消防投弹灭火机器人,该机器人由底盘系统1、灭火弹存储组件2、控制系统3、发射系统4、变位机构5、旋转机构6、托举机构7及装填机构8组成;所述灭火弹存储组件2、控制系统3分别与底盘系统1连接;所述发射系统4与变位机构5连接,变位机构5与底盘系统1连接;所述旋转机构6布置在变位机构5的下方,与底盘系统1连接;所述托举机构7、装填机构8分别与底盘系统1连接。
17.所述底盘系统1,作为机器人各功能部件的搭载载体和运输系统,采用轮式行走机构,承载平台作为搭载载体,底盘系统1内部包含有动力系统和传动机构,实现机器人的远距离行走。轮式行走机构仅为本发明的优选实施例而已,并不用于限制本发明,其它诸如履带平台等形式,也在本权利要求保护范围内。
18.所述灭火弹存储组件2,其结构为立体多层式箱体结构,用于灭火弹的存放和运输过程中的保护。
19.所述控制系统3,包含机器人控制中枢cpu、传感器、驱动元件、信息反馈系统和监测系统。控制系统3为机器人整机的大脑,用于控制消防投弹灭火机器人整机的运行。
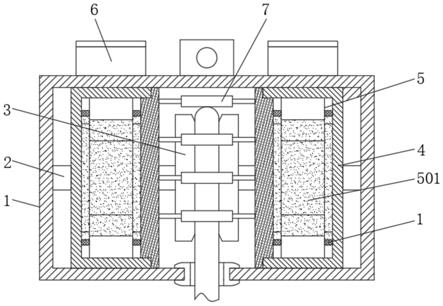
20.如图2所示,所述发射系统4包含发射部件9、减震器10、安装座11、固定架12、滑块13、滑轨14和销轴15。发射部件9用来执行灭火弹远距离发射的动作;在发射部件9的一端设有灭火弹入口30;发射部件9下部安装有滑块13,安装座11上部安装有滑轨14,发射部件9在发射后坐力的作用下通过滑块13与滑轨14之间的相对运动前后动作,减震器10前端通过固定架12与安装座11连接,尾部通过销轴15与发射部件9连接,发射部件9在后坐力作用下向后运动时可以利用减震器10的减震作用将后坐力和能量消耗掉,不会将能量传递至机器人机体上面,避免和减少对机器人机体的损害。所述发射部件9可采用高压气体、火药或电磁弹射等方式发射,均在本权利要求保护范围内。
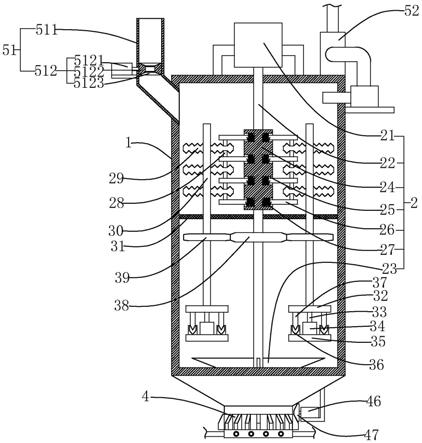
21.如图3所示,所述变位机构5包含变位底架16、回转驱动装置17、俯仰支架18和俯仰驱动装置19。俯仰驱动装置19与发射系统4连接,可以驱动发射部件9进行上下方向的俯仰。俯仰驱动装置19安装在俯仰支架18上面,俯仰支架18固定在回转驱动装置17上面,回转驱动装置17可以驱动包含俯仰驱动装置19在内的发射系统4进行回转动作。回转驱动装置17安装在变位底架16上面,变位底架16与底盘系统1固定连接。
22.如图4所示,所述旋转结构6包含旋转动力装置20、旋转平台21、支撑筒22和灭火弹23;所述旋转平台21为一圆形结构,在其圆周上均匀设置有若干个卡座,每个卡座内安放一个支撑筒22,每个支撑筒22内可放置一个灭火弹23。旋转动力装置20安装在旋转平台21的下面,用于驱动旋转平台21旋转。
23.如图5所示,所述托举机构7包含托举底架24、托举驱动装置25和升降架26;所述托举底架24固定安装在底盘系统1上,升降架26在托举驱动装置25的驱动下,可沿托举底架24上下移动。
24.如图6所示,所述装填机构8包含装填底架27、装填驱动装置28和装填块29。装填底架27固定安装在底盘系统1上,装填驱动装置28安装在装填底架27上面,装填驱动装置28的内部装有装填块29,装填块29在装填驱动装置28的作用下可前后移动,用于为发射部件9装填灭火弹23。
25.本发明的工作过程是:在消防投弹灭火机器人执行任务前,先将旋转结构6的支撑筒22内装满灭火弹23,在消防投弹灭火机器人行进到火灾现场时,在控制系统3的控制下,旋转机构6将布置在支撑筒22内的待装填灭火弹23旋转至发射系统4的发射部件9的灭火弹入口30下方,然后托举机构7将装有灭火弹23的支撑筒22举升至与发射部件9的灭火弹入口30处并对齐,装填机构8通过装填驱动装置28和装填块29将灭火弹23填充至发射系统4的发射部件9内部的待发射位。然后,装填驱动装置28、托举驱动装置25相继复位至初始位置,等待下一次装填动作的开始。在回转驱动装置17和俯仰驱动装置19的配合下,调整发射部件9的炮口位置对准火焰区域,然后在控制系统3的控制下进行灭火弹23的发射,进行灭火。灭火弹存储组件2用于存放待用的灭火弹23。
26.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内所做的任何修改、等同替换、改进等,均包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。