1.本实用新型涉及一种家用去皮装置,属于厨房用品技术领域。
背景技术:
2.瓜果作为人们生活中一种非常必要的美味食物,为人们的生活提供有益养分。然而,去果皮却是一道繁琐的工作,传统的手工去皮方式对熟练程度要求高,费时费力,易造成损伤。为解决这些问题,市面上陆续出现了不少辅助去果皮装置,但都没有真正解决问题。如公告号为cn210382540u的实用新型一种瓜果去皮机,包括u型框架,所述u型框架的底部内壁上转动安装有第一转杆,所述第一转杆的顶部延伸至u型框架内并固定安装有下插座,所述u型框架的一侧内壁上开设有第一凹槽,所述第一凹槽的顶部内壁和底部内壁上固定安装有同一个第一滑杆,所述第一滑杆上滑动安装有安装板,所述安装板和第一凹槽滑动连接,所述安装板的一端延伸至u型框架内,所述安装板上转动安装有第二转杆,所述转杆的两端均延伸至安装板外,所述安装板的底部固定安装有上插座,通过把瓜果叉放在设备上,半自动化的去皮,仍然没有解决去皮的问题;又如公告号为cn206380632u的实用新型一种基于现代农业具有调速定时功能的瓜果去皮机,包括轮子、机体、转动轴,所述机体下方设置所述轮,子,所述机体内部设置所述转动轴,所述转动轴上设置毛刷,所述机体一侧设置端盖,所述端盖内部设置电动机,所述电动机下方设置转速控制器,所述转速控制器下方设置定时器,所述转动轴之间设置齿轮,所述端盖顶部设置控制柜,所述控制柜正面设置显示屏,所述显示屏下方设置功能键,所述控制柜一侧设置进水管,所述机体底部设置出水管,所述端盖外侧设置把手,利用电机转动带动毛刷对瓜果进行去皮,该方法并不容易把握,容易造成去不尽或去得太多。而本实用新型,通过对瓜果外型进行精确计算,由处理器进行控制,不但速度快,而且非常精确且安全,给人们带来了很大的便利。
技术实现要素:
3.针对现有技术的不足,本实用新型的目的在于提供一种家用去皮装置,以解决现有技术中瓜果去皮不均匀、效率低、不方便使用的技术问题。
4.为解决上述技术问题,本实用新型所采用的技术方案是:
5.一种家用去皮装置,其特征是,包括装置本体1,所述装置本体1包括转动机构2、第一传动装置3、摄像头4、第二传动装置5、刀片装置6及处理装置7;所述装置本体1包括腔体,腔体上方设置有盖板12,所述转动机构2设置在盖板12上,所述第一传动装置3设置在装置本体1的一侧,第一传动装置3的动力输出端与摄像头4传动连接;所述第二传动装置5设置在第一传动装置3相邻一侧,第二传动装置5的动力输出端与刀片装置6传动连接。
6.进一步,所述装置本体1中设置有第一传动装置3,所述第一传动装置3的一侧设置有第一导轨14和第一丝杆32;所述第一导轨14和第一丝杆32平行设置;所述装置本体1中设置有第二传动装置5,所述第二传动装置5的一侧设置有第二导轨15和第二丝杆52;所述第二导轨15和第二丝杆52平行设置。
7.进一步,所述装置本体1还包括设于装置本体1底部的漏斗13和本体支架 11,所述漏斗13的下端面高于本体支架11的下端面。
8.进一步,所述盖板12与腔体一侧用铰链122连接,另一侧用锁扣121连接。
9.进一步,所述转动机构2包括外壳21、第三步进电机22、传动轴23、转动轴承24、转盘25、针刺26,所述转动机构2与盖板12经转动轴承24转动连接,所述转盘25与传动轴23固定连接,所述传动轴23与步进电机22的动力输出端固定连接,所述针刺26与转盘25固定连接,所述第三步进电机22与处理装置7电气连接。
10.进一步,所述第一传动装置3包括第一步进电机31、第一丝母33、第一滑块34、与第一导轨14同轴向的第一丝杆32,所述第一步进电机31设置在第一导轨14上,所述第一丝杆32与第一步进电机31的动力输出端固定连接,所述第一丝母33与第一丝杆32螺纹连接,所述第一滑块34与第一丝母33固定连接,所述摄像头4与第一滑块34固定连接,所述第一步进电机31与处理装置7 电气连接。
11.进一步,所述第二传动装置5包括第二步进电机51、第二丝母53、第二滑块54、与第二导轨15同轴向的第二丝杆52,所述第二步进电机(51)设置在第二导轨(15)上,所述第二丝杆52与第二步进电机51的动力输出端固定连接,所述第二丝母53与第二丝杆52螺纹连接,所述第二滑块54与第二丝母53 固定连接,所述刀片装置6与第二滑块54固定连接,所述第二步进电机51与处理装置7电气连接。
12.进一步,所述刀片装置6包括底座61、进给机构62以及刀片63,所述进给机构62包括设置在底座61上的导轨621和设置导轨621上可以滑动的移动滑块622,所述移动滑块622上设置有线圈组623,所述移动滑块622与所述底座61形成的中间腔内还设置有与所述线圈组623对应的磁板624,所述进给机构62由处理装置7与驱动控制器控制。
13.进一步,所述摄像头4在第一步进电机31带动下,从上向下,连续拍摄安装在转动机构2上瓜果的图像送给处理装置7。
14.进一步,所述处理装置7接收到瓜果的图像,计算出瓜果与刀片一侧的边沿与底座61的距离,送给驱动控制器控制刀片工作。
15.与现有技术相比,本实用新型所达到的有益效果:
16.利用侧向围合形成的外壳、外壳的顶面安装有顶盖,顶盖上安装了能转动的电机,电机通过轴承带动可固定瓜果的针刺;外壳内的一侧安装了可上下运动的摄像头,可以精确地拍摄瓜果一侧的形状,相对的,在外壳的相邻一侧安装了可上下移动的刀片,刀片可根据瓜果外形、在处理器的控制下,对瓜果准确去皮。本实用新型装置操作简便,提高了去皮质量和速度。
附图说明
17.图1是本实用新型实施例的整体结构示意图;
18.图2是本实用新型实施例中摄像头传动装置的结构示意图;
19.图3是本实用新型实施例中刀片装置传动装置的结构示意图;
20.图4是本实用新型实施例中刀片装置的结构示意图;
21.图5是本实用新型实施例中所述刀片进给机构的结构示意图;
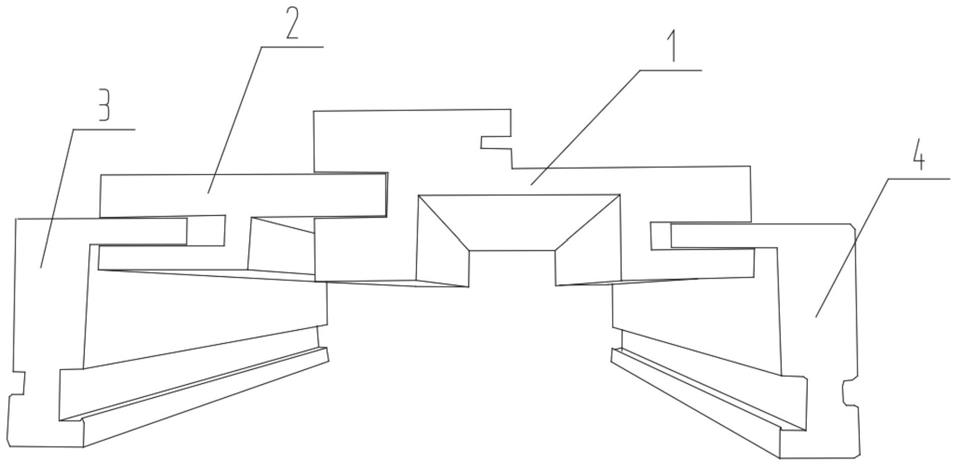
22.图6为摄像头的位置示意图。
具体实施方式
23.下面结合附图对本实用新型作进一步描述。以下实施例仅用于更加清楚地说明本实用新型的技术方案,而不能以此来限制本实用新型的保护范围。
24.需要说明的是,在本实用新型的描述中,术语“前”、“后”、“左”、“右”、“上”、“下”、“内”、“外”等指示的方位或位置关系为基于附图中所示的方位或位置关系,仅是为了便于描述本实用新型而不是要求本实用新型必须以特定的方位构造和操作,因此不能理解为对本实用新型的限制。本实用新型描述中使用的术语“前”、“后”、“左”、“右”、“上”、“下”指的是附图中的方向,术语“内”、“外”分别指的是朝向或远离特定部件几何中心的方向。
25.本实用新型具体实施方式提供了一种家用去皮装置,如图1所示,包括装置本体1,所述装置本体1包括转动机构2、第一传动装置3、摄像头4、第二传动装置5、刀片装置6及处理装置7;所述第一传动装置3设置在装置本体1 的一侧,所述第二传动装置5设置在装置本体1的另一侧;所述摄像头4位置安装在距第二传动装置的相邻一侧的1/4处,如图6所示,便于精确拍摄到果皮的边沿,刀片在中间,便于计算最短距离;所述装置本体1中设置有第一传动装置3,所述第一传动装置3的一侧设置有第一导轨14和第一丝杆32;所述第一导轨14和第一丝杆32平行设置;第一传动装置3的动力输出端与摄像头4 传动连接,沿第一丝杆32轴向往复运动;所述装置本体1中设置有第二传动装置5,所述第二传动装置5的一侧设置有第二导轨15和第二丝杆52;所述第二导轨15和第二丝杆52平行设置;所述第二传动装置5设置在第一传动装置3 相邻一侧,位置安装在正中处,所述第二传动装置5的动力输出端与刀片装置6 传动连接,沿第二丝杆52轴向往复运动。
26.所述装置本体1还包括设于装置本体1底部的漏斗13和本体支架11,所述漏斗13的下端面高于本体支架11的下端面。
27.所述装置本体1还包括侧向围腔体、腔体上方设有盖板12,盖板12中央安装了转动机构2,盖板12与腔体一侧用铰链122连接,另一侧用锁扣121连接。
28.所述转动机构2包括外壳21、第三步进电机22、传动轴23、转动轴承24、转盘25、针刺26,所述转动机构2与盖板12经转动轴承24转动连接,所述转盘25与传动轴23固定连接,所述传动轴23与步进电机22的动力输出端固定连接,所述针刺26与转盘25固定连接,所述第三步进电机22与处理装置7电气连接。
29.所述第一传动装置3,如图2所示,包括第一步进电机31、第一丝母33、第一滑块34、与第一导轨14同轴向的第一丝杆32,所述第一步进电机31设置在第一导轨14上,所述第一丝杆32与第一步进电机31的动力输出端固定连接,所述第一丝母33与第一丝杆32螺纹连接,所述第一滑块34与第一丝母33固定连接,所述摄像头4与第一滑块34固定连接,所述第一步进电机31与处理装置7电气连接。
30.所述第二传动装置5,如图3所示,包括第二步进电机51、第二丝母53、第二滑块54、与第二导轨15同轴向的第二丝杆52,所述第二步进电机51设置在第二导轨15上,所述第二丝杆52与第二步进电机51的动力输出端固定连接,所述第二丝母53与第二丝杆52螺纹连接,所述第二滑块54与第二丝母53固定连接,所述刀片装置6与第二滑块54固定连接,所述第二步进电机51与处理装置7电气连接。
31.如图4、如图5所示,所述刀片装置6包括底座61、进给机构62以及刀片 63,所述进给机构62包括设置在底座61上的底座导轨621和设置在底座导轨 621上可以滑动的移动滑
块622,所述移动滑块622上设置有线圈组623,所述移动滑块622与所述底座61形成的中间腔内还设置有与所述线圈组623对应的磁板624,所述进给机构62由处理装置7与驱动控制器控制。
32.所述摄像头(4)在第一步进电机(31)带动下,从上向下,连续拍摄安装在针刺(26)上瓜果的图像送给处理装置(7)。
33.所述处理装置(7)接收到瓜果的图像,计算出瓜果与刀片一侧的边沿与底座(61)的距离,送给驱动控制器控制刀片工作。
34.一种家用去皮装置的去皮方法包括以下步骤:
35.a:将瓜果安装在针刺上,盖上盖板;
36.b:启动电源,处理装置工作,第一、第二、第三步进电机工作分别带动第一传动装置、第二传动装置和转动机构同步转动;转动机构带动瓜果转动,便于刀片去皮,第一传动装置带动摄像头从上往下移动,以便精确拍摄瓜果一侧的形状、第二传动装置带动刀片从上往下去皮;
37.c:摄像头连续拍摄安装在针刺上瓜果的图像送给处理装置;
38.d:处理装置接收到瓜果的图像,计算出瓜果与刀片一侧的边沿与底座的距离,送给驱动控制器控制刀片工作,具体识别方法如下:
39.(1)对影像进行灰度化处理,其公式为:
40.y=0.30r 0.59g 0.11b,
41.式中,y为灰度化处理后影像的灰度,r为灰度化处理前影像在红色通道上的亮度,g为灰度化处理前影像在绿色通道上的亮度,b为灰度化处理前影像在蓝色通道上的亮度;
42.(2)设影像中任意像素点(x,y)的灰度值为f(x,y),在区间[x1,x2]和[y1,y2]内的垂直积分投影函数和水平积分投影函数分别表示为s
v
(x)和s
h
(y),公式如下:
[0043][0044][0045]
平均垂直积分投影函数和平均水平积分投影函数分布表示为m
v
(x)和 m
h
(y),计算公式如下:
[0046][0047][0048]
考虑到在均值相同的情况下,积分投影函数会失效,因而采用方差投影函数代替积分投影函数才避免这种情况的发生,设区间[x1,x2]和[y1,y2]内的垂直方差投影函数和水平方差投影函数分别为和则有:
[0049]
[0050][0051]
区间[x1,x2]和[y1,y2]为图像区域,x1为图像的横坐标起始点,x2为图像的横坐标终止点,y1为图像的纵坐标起始点、y2为图像的横坐标终止点,x
i
为图像的横坐标中任一点,y
i
为图像的纵坐标中任一点;
[0052]
(3)对于给定阀值t,找出所有满足以下条件的连续区间:
[0053][0054]
式中,为任一量词,x为像素点(x,y)的x的取值范围,δ为很小的量。对于离散的数字图像来说,一般δ=1,然后找出所有满足条件的x区间中的最大值x0,即x0应满足以下条件:
[0055][0056]
则x=x0处为不同区域的边界的横坐标。同理可得y=y0处为不同区域的边界的纵坐标;
[0057]
(4)比较所有x0,得到x0的最小值即为x的左边界,即本体边框,x0的最大值即为x的右边界,即瓜果的外侧的边沿形状,并转换为刀片进给装置的位置数据,送给刀片驱动控制器控制刀片位置,同理可得y的上边界和下边界,即为刀片的宽度。
[0058]
e:刀片装置在第二传动装置带动下,与第一传动装置同步向下运动,同时,刀片的进给装置的位置由处理装置送给控制驱动控制器控制瓜果去皮。
[0059]
以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。