1.本发明属于康复医疗器械领域,具体涉及一种轮椅式步行辅助器。
背景技术:
2.近年来,全球人口老龄化问题日益严重,老年人到一定年龄后,将会出现生理机能衰退现象,老年人群体多数存在四肢灵活度下降,尤其下肢行走能力大大减弱。同时一部分老年人由于中风等心血管疾病原因引起下肢功能性障碍,失去了健康正常的下肢步行能力,平时的日常生活因此受到极大的影响,其日常生活需要旁人照料;另外,近年来,由于脑卒中风、脊椎损伤等中枢神经疾病引起的下肢运动功能障碍患者急剧增加。下肢运动功能障碍患者行动不便,难以独立生活,很容易产生负面情绪,同时给家人带来沉重负担,他们很向往正常人的生活。
3.现有市面上的下肢辅助运动辅助器大多采用多个独立微型驱动源来驱动下肢动作,需要通过复杂控制算法来实现下肢运动,动力源体积、重量的选取都会受到限制,因此辅助运动辅助器的成本较高。
技术实现要素:
4.鉴于此,本发明实施例的目的在于提供一种采用单个驱动源来实现大小腿同时运动的轮椅式步行辅助器。
5.本发明的实施例是这样实现的:
6.本发明实施例提供了一种轮椅式步行辅助器,所述轮椅式步行辅助器具有站立状态和坐位状态,所述轮椅式步行辅助器包括轮椅、外骨骼结构和下肢步行机构;
7.所述外骨骼结构设置于所述轮椅,所述外骨骼结构包括两个下肢外骨骼组件,所述下肢外骨骼组件包括大腿杆、小腿杆和脚板,所述大腿杆和所述小腿杆通过膝关节结构铰接,所述小腿杆和所述脚板通过踝关节结构铰接;
8.所述下肢步行机构包括两个用于驱动所述下肢外骨骼组件的驱动总成,所述驱动总成分别与所述膝关节结构和所述踝关节结构铰接,所述驱动总成采用单动力源同时驱动所述大腿杆摆动及所述小腿杆相对于所述大腿杆摆动。
9.作为上述实施例的可选技术方案,所述轮椅包括底架、背架、扶手、电动主动轮和万向轮,所述背架可活动地设置于所述底架且所述背架能够相对于所述底架升降及横向运动,所述轮椅两侧分别设置有一个所述扶手,所述底架的底部后侧设置有两个所述电动主动轮,所述底架的底部前侧设置有两个所述万向轮。
10.作为上述实施例的可选技术方案,所述驱动总成包括驱动源和耦合传动机构,所述驱动源设置于所述底架,所述耦合传动机构包括曲柄、大腿连杆和小腿连杆,所述曲柄包括相互固连且不共线的第一杆部和第二杆部,所述第一杆部的第一端与所述驱动源传动连接且第二端与所述第二杆部的第一端连接,所述第二杆部第二端铰接于所述小腿连杆的一端,所述大腿连杆第一端铰接于所述第一杆部和所述第二杆部的连接处且第二端铰接于所
述膝关节结构,所述小腿连杆的第二端铰接于所述踝关节结构。
11.作为上述实施例的可选技术方案,所述轮椅式步行辅助器还包括站坐机构,所述站坐机构包括伸缩动力源和多根连接杆,所述伸缩动力源的两端分别与所述底架和所述背架铰接,所述连接杆的两端分别与所述底架和所述背架铰接,所述伸缩动力源与所述连接杆交叉设置。
12.作为上述实施例的可选技术方案,所述轮椅式步行辅助器还包括控制系统,所述控制系统包括电池、控制器,所述电池和所述控制器安装于所述底架。
13.作为上述实施例的可选技术方案,所述外骨骼结构还包括两个用于下肢外骨骼组件的绑缚组件,两个所述绑缚组件与两个所述下肢外骨骼组件一一对应,所述绑缚组件包括设置于所述大腿杆上的大腿绑缚和设置于所述小腿杆上的小腿绑缚。
14.作为上述实施例的可选技术方案,所述站坐机构包括所述伸缩动力源和四根连接杆,四根所述连接杆对称设置在所述伸缩动力源的两侧且构成两个连接组件,所述连接组件上的两根所述连接杆、所述背架和所述底架共同构成一个平行四边形机构。
15.作为上述实施例的可选技术方案,所述外骨骼结构还包括腰部结构和两个髋关节结构,所述腰部结构设置于所述背架,两个所述下肢外骨骼组件分别通过两个所述髋关节结构连接于所述腰部结构。
16.作为上述实施例的可选技术方案,所述伸缩动力源为电动推杆。
17.作为上述实施例的可选技术方案,所述驱动源为直流伺服电机。
18.本发明的有益效果是:
19.本发明提供的轮椅式步行辅助器,通过采用单个驱动源和耦合传动机构可以拟合人体步态方式,可以控制大小腿同时运动,且该动力源相较于现有的步行辅助器在体积、重量和控制难度等方面的要求都大大降低,因此该结构设计也将大大减少该步行辅助器的开发成本。
20.本发明提供的轮椅式步行辅助器的站坐机构通过将电动推杆和连接杆交叉设置于背架和底架,可以使轮椅与使用者保持随动状态,完成站坐两种姿态的轻松切换。
21.本发明提供的轮椅式步行辅助器,通过将控制器、驱动源和电池设置在底架上,(现有的设备电池、控制器和驱动源都设置在外骨骼结构上)减轻了本应加载在使用者上的重量,提高了穿戴的舒适性。
附图说明
22.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。通过附图所示,本发明的上述及其它目的、特征和优势将更加清晰。在全部附图中相同的附图标记指示相同的部分。并未刻意按实际尺寸等比例缩放绘制附图,重点在于示出本发明的主旨。
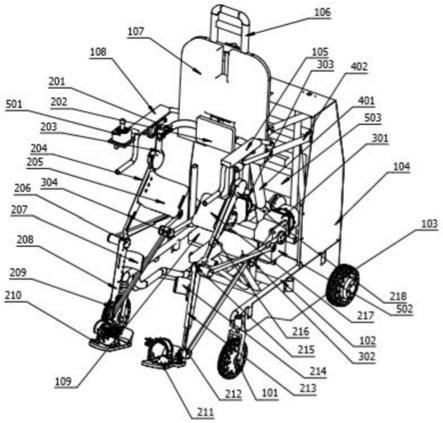
23.图1为本发明实施例提供的轮椅式步行辅助器站立状态的结构示意图;
24.图2为本发明实施例提供的轮椅式步行辅助器坐位状态的结构示意图;
25.图3为本发明实施例提供的轮椅式步行辅助器提供的耦合传动结构的结构示意
图;
26.图4为本发明实施例提供的轮椅式步行辅助器提供的站坐机构的结构示意图。
27.图标:101
‑
万向轮;102
‑
底架;103
‑
驱动轮;104
‑
外壳组件;105
‑
左扶手;106
‑
背架;107
‑
靠背垫;108
‑
右扶手;109
‑
坐垫;201
‑
腰部结构;202
‑
腰部靠垫;203
‑
右髋关节结构;204
‑
右大腿杆;205
‑
右大腿绑缚;206
‑
右膝关节结构;207
‑
右小腿绑缚;208
‑
右小腿杆;209
‑
右踝关节结构;210
‑
右脚板结构;211
‑
左脚板结构;212
‑
左踝关节结构;213
‑
左小腿杆;214
‑
左小腿绑缚;215
‑
左膝关节结构;216
‑
左大腿杆;217
‑
左大腿绑缚;218
‑
左髋关节结构;301
‑
左驱动电机;302
‑
左耦合传动机构;303
‑
右驱动电机;304
‑
右耦合传动机构;401
‑
电动推杆;402
‑
连接杆;501
‑
操控器;502
‑
控制器;503
‑
电池;5
‑
曲柄;51
‑
第一杆部;52
‑
第二杆部;6
‑
大腿连杆;7
‑
小腿连杆。
具体实施方式
28.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
29.因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
31.此外,术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
32.实施例
33.请参照图1
‑
图2所示,本发明的实施例提供了一种轮椅式步行辅助器,该轮椅式步行辅助器主要用于下肢运动功能障碍患者康复治疗使用。
34.该轮椅式步行辅助器主要包括轮椅、外骨骼结构、下肢步行机构、站坐机构和控制系统。
35.其中,轮椅包括底架102、背架106、外壳组件104、驱动轮103、万向轮101、靠背垫107、坐垫109、左扶手105和右扶手108。
36.靠背垫107支撑和坐垫109分别支撑人体背部和臀部,提高使用者舒适度。
37.其中,底架102的作用是作为该轮椅式步行辅助器的基座,底架102位于轮椅的底部,底架102由型材焊接而成,强度高稳定性好。
38.左扶手105和右扶手108分别设置于轮椅两侧。
39.底架102前部左右两侧分别设置有一个万向轮101,底架102后部左右两侧分别设置有一个驱动轮103。对称安装于底架102前部左右两侧的万向轮101与对称安装于底架102后部左右两侧的驱动轮103配合实现该轮椅式步行辅助器轮式前行、后退和转弯等功能。
40.外骨骼结构包括两个下肢外骨骼组件,两个下肢外骨骼组件分别为左下肢外骨骼
组件和右下肢外骨骼组件。
41.其中,左下肢外骨骼组件包括左大腿杆216、左小腿杆213和左脚板结构211。左大腿杆216和左小腿杆213通过左膝关节结构215铰接。左脚板结构211通过左踝关节结构212铰接于左小腿杆213。
42.其中,右下肢外骨骼组件右大腿杆204、右小腿杆208和右脚板结构210。右大腿杆204和右小腿杆208通过右膝关节结构206铰接。右脚板结构210通过右踝关节结构209铰接于右小腿杆208。
43.此外,外骨骼结构还包括两个用于下肢外骨骼组件的绑缚组件,两个绑缚组件包括右绑缚组件和左绑缚组件。
44.其中,右绑缚组件包括分别设置在右大腿杆204和右小腿杆208上的右大腿绑缚205和右小腿绑缚207。左绑缚组件包括分别设置在左大腿杆216和左小腿杆213上的左大腿绑缚217和左小腿绑缚214。该绑缚组件可以采用带扣、魔术贴等结构便于使用者穿戴。
45.外骨骼结构还包括腰部结构201、腰部靠垫202,左髋关节结构218和右髋关节结构203。腰部结构201后部固连于背架106,腰部靠垫202设置在腰部结构201的顶部用于支撑人体腰部。
46.此外,右大腿杆204和左大腿杆216分别通过右髋关节结构203和左髋关节结构218连接于腰部结构201。
47.控制系统包括操控器501、电池503、控制器502和分布于辅助器各机构上的传感器。操控器501、电池503、控制器502和传感器之间相互电连接。
48.传感器设置于外骨骼结构、下肢步行机构、轮椅和站坐机构上。背架和底座上有姿态传感器,可以检测轮椅所处状态,站立状态下倾斜角度等,可以有效防止使用者在较大坡度环境下使用行走功能时,重心超出安全域导致倾覆危险。每条腿的髋关节与膝关节均安装有绝对角度编码器,可有实时反馈大腿和小腿角度,实现步态识别与腿部姿态检测,大腿绑缚和小腿绑缚中安装有压力传感器,可以实现患者步行过程痉挛检测与人机控制效果提升。
49.其中,操控器501安装于左扶手105或右扶手108上方便使用者双手操控,操控器501用于使用者控制辅助器进行站立、坐下和行走动作。
50.控制器502对来自传感器的信号与来自操控器501的命令进行计算处理。
51.此外,电池503和控制器502安装于底架102上,减轻辅助器使用者负重(传统辅助器将电池503、控制器502安装于外骨骼结构)。
52.下肢步行机构包括两个驱动总成。其中,驱动总成包括驱动源和耦合传动机构,驱动源安装于底架102,减轻使用者负重(传统辅助器将驱动源安装于外骨骼结构)。
53.驱动源采用可以采用正转和反转的电机,也可以采用可以能够实现摆动动作的结构,例如摆动导杆机构,在本实施例中驱动源采用直流伺服电机。
54.请参照图3所示,耦合传动机构包括曲柄5、大腿连杆6和小腿连杆7。曲柄5包括相互固连且不共线的第一杆部51和第二杆部52。
55.其中,第一杆部51一端传动连接于驱动源的输出端于a点,第一杆部51的另一端固定连接第二杆部52的一端,第二杆部52的另一端铰接于小腿连杆7的一端,小腿连杆7的另一端与左踝关节结构212铰接于c点,大腿连杆6一端铰接于第一杆部51和第二杆部52的连
接处,大腿连杆6的另一端与左膝关节结构215铰接于b点。
56.请参照图3所示,当驱动源带动曲柄5顺时针转动时,在大腿连杆6和小腿连杆7的作用下,人体下肢进行向上抬腿动作,当驱动源带动曲柄5逆时针转动时,人体下肢进行向下收腿动作。当驱动源连续进行正转和反转动作时,辅助器使用者即可完成行走动作。
57.请参照图4,背架106可活动地设置于底架102且背架106能够相对于底架102升降及横向运动,例如背架106和底架102之间通过板件、杆件连接,在本实施例中采用连接杆402连接背架106和底架102。
58.请参照图4所示,站坐机构包括伸缩动力源和多根连接杆402。连接杆402一端铰接底架102且另一端铰接背架106,伸缩动力源一端铰接底架102且另一端铰接背架106,伸缩动力源和连接杆402交叉设置,这里交叉设置指的是将伸缩动力源与连接杆402分别看成一条直线,两条直线互为异面直线。
59.伸缩动力源可以采用电动推杆401、液压推杆等机构,在本实施例中,伸缩动力源为电动推杆401,电动推杆401下端铰接底架102且上端铰接背架106。
60.连接杆402的作用主要是连接限位,在本实施例中采用四根连接杆402,四根连接杆402为两个连接组件,两个连接组件分别对称地设置在伸缩动力源的两侧,一个连接组件包括两根连接杆402,每组连接组件上的两个连接杆402与背架106和底架102共同构成平行四边形机构,这样可以使每根连接杆402受力相同,有效地提高了连接杆402的稳定性。
61.需要注意的是,当伸缩动力源处于完全收缩状态时,连接杆402刚好处于水平状态,此时对应辅助器使用者处于坐位状态,当伸缩动力源处于完全伸张状态时,连接杆402刚好处于竖直状态,此时对应辅助器使用者处于站立状态。
62.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。