1.本发明涉及智能打药系统技术领域,具体涉及一种智能靶向喷药系统。
背景技术:
2.随着计算机技术、控制技术、信息技术的快速发展,工业的生产和管理进入了自动化、信息化和智能化时代,智能化已经成为时代发展的需要。对于复杂的农业喷药工作环境,采用智能型田间循迹避障行走系统完成相应的任务,具有良好的可行性。推广智能化在农业田间管理、自动化生产线、仓储管理及物流配送等领域的应用研究和开发智能田间寻迹避障行走机器人具有十分重要的意义。智能田间寻迹避障行走机器人既可以对规定好的路线进行自我工作,也可以在未知情况下通过红外线回传功能对前方障碍物进行探测,并通过数据处理功能,做出相应的躲避动作,以实现机器人工作的智能化、无人化。在环境恶劣人工无法深入的条件下,人们可通过视频回传功能远程控制机器人进行相应的工作。大大的节约了农田施药的人力物力耗费,提高了农业打药工作效率。
技术实现要素:
3.本发明提出的一种智能靶向喷药系统,可解决农田施药的人力物力耗费严重,喷药效率低,农药浪费的问题,可提高农业打药工作效率,节省人力成本。
4.为实现上述目的,本发明采用了以下技术方案:
5.一种智能靶向喷药系统,包括用于识别病害的病害图像识别系统,还包括靶向喷药系统、循迹避障行走系统以及识别控制系统;
6.病害图像识别系统、靶向喷药系统及循迹避障行走系统分别与识别控制模块通讯连接;
7.其中:
8.病害图像识别系统通过卷积神经网络识别病害叶片,将实时监测结果传输给识别控制系统,识别控制系统根据接收到的信号来控制靶向喷药系统和循迹避障行走系统的通断电情况来控制这两个系统的工作与否。
9.进一步的,所述循迹避障行走系统包括喷药车,喷药车的底部设置有驱动轮、万向轮及电机驱动模块,电机驱动模块与驱动轮连接,且电机驱动模块与识别控制模块通讯连接;
10.还包括单片机和两个循迹模块;
11.两个循迹模块对称设置在喷药车的前端,每个循迹模块内均设有两个红外循迹传感器,且每个红外循迹传感器均与单片机电连接。
12.进一步的,所述循迹避障行走系统还包括指示灯、方向灯与显示屏,且指示灯、方向灯与显示屏均与单片机电连接;
13.指示灯与显示屏均安装在喷药车的外壁上,方向灯对称安装在喷药车两侧外壁上。
14.进一步的,所述识别控制模块包括微型电脑和usb摄像头,其中,微型电脑和usb摄像头通讯连接。
15.进一步的,所述靶向喷药系统包括水泵继电器、水泵、药箱和喷杆,其中,水泵继电器、水泵和药箱均设置在喷药车内部;
16.水泵继电器与水泵和识别控制系统电连接;
17.水泵的一端与药箱连接,水泵的另一端与喷杆连接,喷杆固定在喷药车的外壁上。
18.一种智能靶向喷药的寻迹方法,所述寻迹方法包括:
19.在寻迹场地内预先用黑线标注出给定路线;
20.若四个红外循迹传感器均未检测到黑线时,则喷药车直线行驶;
21.若左右两边靠近中心的两个红外循迹传感器检测到黑线时,则喷药车进行小转弯;
22.若左右两边远离中心的两个红外循迹传感器检测到黑线时,则喷药车进行大转弯;
23.若喷药车车身左边的红外循迹传感器检测到黑线时,则喷药车左轮减速,喷药车车身向左修正;
24.若喷药车车身右边的红外循迹传感器检测到黑线时,则喷药车右轮减速,喷药车车身向右修正。
25.进一步的,所述寻迹方法还包括:
26.若喷药车车身向左修正,则左侧方向灯亮起;
27.若喷药车车身向右修正,则右侧方向灯亮起。
28.一种智能靶向喷药的病害图像识别方法,所述病害图像识别方法包括:
29.采集若干原始数据,其中,原始数据包括健康叶片图片与生病叶片图片;
30.对若干原始数据进行数据增强,其中,数据增强包括马赛克增强与图片融合算法;
31.对数据增强后的若干原始数据进行数据扩展,其中,数据扩展包括引入coco数据集或/和plantvillge数据集或/和imagenet中的一种或多种多样数据;
32.将数据增强与数据扩展后的若干原始数据输入yolov5模型中进行学习,得到病害图像识别模型。
33.由上述技术方案可知,本发明的智能靶向喷药系统,基于高阶残差和参数共享反馈的深度卷积神经网络蔬菜病害快速识别技术,实现黄瓜霜霉病、番茄叶霉病的病害识别准确率为93.9%;基于单片机技术,实时采集传感器信号,智能分析外部环境、路径信息,自动实现方向控制,采用ccd进行路径识别,可以识别白色场地中的任意黑色带状引线,使机器人沿黑色导引线自动行驶。本发明的研究价值在于单片机对传感器的管理及对其反馈信息处理后对电机的精确控制,以及自动避障、相互之间通讯功能的研究和实施。
附图说明
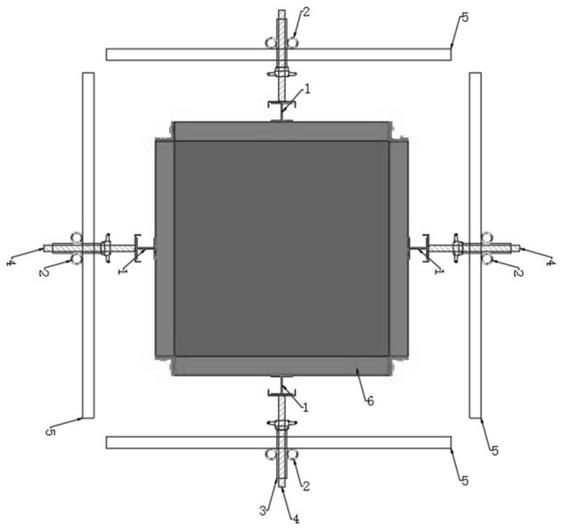
34.图1是本发明的机械结构外观示意图;
35.图2是本发明的车体俯视透视简图;
36.图3是本发明的微型电脑硬件连接示意图;
37.图4是本发明的单片机硬件连接示意图;
38.图5是本发明的控制逻辑框图;
39.图6是本发明的循迹控制的控制框图;
40.图7是本发明使用到的tcrt5000红外传感器原理图;
41.图8是本发明的循迹逻辑图。
42.图中:1、喷药车;2、喷杆;3、红外循迹传感器;4、指示灯;5、方向灯;6、万向轮;7、驱动轮;8、显示屏;9、水泵;10、药箱;12、电源。
具体实施方式
43.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。
44.如图1
‑
8所示,一种智能靶向喷药系统,包括用于识别病害的病害图像识别系统,其中,还包括靶向喷药系统、循迹避障行走系统以及识别控制系统;
45.病害图像识别系统、靶向喷药系统及循迹避障行走系统分别与识别控制模块通讯连接;
46.具体的,病害图像识别系统通过卷积神经网络识别病害叶片,将实时监测结果传输给识别控制系统,识别控制系统根据接收到的信号来控制靶向喷药系统和循迹避障行走系统的通断电情况来控制这两个系统的工作与否。
47.示例性的,识别控制系统包括微型电脑和usb摄像头,其中,微型电脑优选为nvidia jetson xavier微型电脑作为主控板,该主板外形小巧,且拥有超级计算机性能的物联网终端、处理器运算能力高达21万亿次/秒(21tops)计算能力,可运行卷积神经网络;拥有40个可编程输入输出口(gpio),可编程控制执行机构和底盘运动;
48.具体实施时:
49.(1)病害图像识别系统,该病害图像识别系统包括:实时病害图像识别模型、实时叶片图像采集系统和识别控制系统;
50.更具体的说:
51.实时病害图像识别模型,采用高阶残差和参数共享反馈的深度卷积神经网络,对plantvillge、imagenet、自采集及扩展数据集共15700张图片,经过数百轮的学习训练,构建了黄瓜霜霉病和番茄叶霉病快速识别与病叶定位模型;将该模型转移到靶向喷药智能小车的微型电脑;该模型在行走运行时,可识别分辨率为512x640像素的图像,模型运行速度22帧每秒,满足实时运行的需求。
52.实时叶片图像采集系统,采用视频流媒体技术,通过微型电脑控制usb摄像头,采集待识别的黄瓜和番茄图片;将图片送入实时病害图像识别模型中进行病害识别,并根据识别结果执行喷药、行走等操作。
53.识别控制系统,包括微型电脑和usb摄像头,其中,该usb摄像头用以实时采集待识别的黄瓜或番茄的叶片图片,通过视频流技术将采集到的视频传输给微型电脑;
54.nvidia jetson xavier微型电脑为图像识别的核心部分,其上面搭载了可用于识别并且定位病叶的病害图像识别系统,用以识别病叶,并且当识别到病叶的时候,可通过gpio管脚控制车轮继电器和水泵继电器的通断状态;
55.更具体的,微型电脑将图片转换成分辨率为512x640像素的图片,将图片送入病害图像识别系统中进行病害识别和定位,病害图像识别系统运行速度22帧每秒,满足实时运行的需求
56.(2)靶向喷药系统
57.喷药系统由水泵继电器、水泵9、药箱10和喷杆2组成。水泵9需要12v电压驱动,由于微型电脑可编程接口(gpio)的输出电压仅为3.3v,不可直接驱动喷药水泵9,为实现喷药水泵9的可编程开关,利用小车底盘提供12v电源12给水泵9供电,该水泵9用以抽取药箱10中的农药,通过喷杆2喷洒出去,在微型电脑和水泵9间添加继电器模块,使用微型电脑可编程接口(gpio)输出电压作为信号,驱动水泵9运转,具体的,当其接通时,12v电源12才能给水泵9供电,解决了识别控制系统与喷药系统的联动控制问题。
58.在具体实施时,水泵继电器、水泵9和药箱10均设置在喷药车1内部;
59.水泵继电器与水泵9和识别控制系统电连接;
60.水泵9的一端与药箱10连接,水泵9的另一端与喷杆2连接,喷杆2固定在喷药车1的外壁上。
61.(3)循迹避障行走系统
62.包括喷药车1、驱动轮7、万向轮6、循迹模块、车轮继电器、驱动轮7电源12、电机驱动模块、方向灯5、指示灯4、显示屏8及单片机;
63.示例性的,单片机选用at89c51型单片机,显示屏8选用nokia5110;
64.利用at89c51单片机对循迹模块的管理及对其反馈信息处理后对电机驱动模块的精确控制,实现喷药车1的寻迹;同时,车身上安装ccd,方向灯5,以及用于反应喷药车1运行时间的显示屏8。
65.通过设置有循迹模块与at89c51单片机,使得喷药车1能够灵敏检测路面情况并作出准确的判断。
66.以下结合附图具体说明:
67.如图1所示,喷药车1采用后轮驱动,后轮通过电机驱动,动力由驱动轮7电源12提供,电源12通过车轮继电器接收微型电脑的弱电信号控制驱动模块给电机供电的情况,实现在需要喷药的情况下让下车停下来;驱动模块用以控制驱动轮7的转动的速度,从而控制喷药车1前进的速度和控制喷药车1的转向,其中的芯片由at89c51单片机提供5v电压,驱动轮7的轮胎摩擦系数相对较大,为了使驱动轮7断电的情况下能够立马停下来,通过调整驱动轮7的转速而控制启停和速度,前轮是万向轮6,起支撑的作用,由于是万向轮6的原因,车的前进方向和速度完全由后轮的运动来决定;
68.将循迹模块装在车体的前部,其中,循迹模块由红外循迹传感器3组成,该红外循迹传感器3为tcrt5000红外循迹传感器,用以在喷药车1前进的途中观测传感给定轨道,将其测量值返回给at89c51单片机,用以对小车前进方向的控制,具体的说,如图4所示,喷药车1的时候会有一个黑线轨迹,这个黑色轨迹就是喷药车1给定的路线,小车前置的两个循迹模块用来检测黑线的状况。每个模块中有两个tcrt5000红外循迹传感器3,当四个传感器都没检测到黑色时,则小车直线行驶,当左右两边靠近中心的传感器检测到黑色时,则小车进行小转弯,当左右两边的远离中心的两个传感器检测到黑色时,则小车进行大转弯。当车身左边的传感器检测到黑线时,主控芯片控制左轮减速,车身向左修正,此时左边的方向显
示灯亮起;当车身右边的传感器检测到黑线时,主控芯片控制右轮减速,车身向右修正,此时右边的方向显示灯亮起,从而实现循迹功能;
69.红外循迹传感器3采用tcrt5000红外循迹传感器,其原理图如图6所示。红外探测即利用红外线在不同的颜色的物体表面具有不同的反射强度特点,在喷药车1行驶过程中不断向地面发射红外光,当红外线遇到黑色则会被吸收,喷药车1上的接收器就无法接受到红外光,而遇到其他颜色则会发生或多或少的漫反射,反射光则会被接收管接受到,红外循迹传感器3通过高低电平的输出来传递检测结果。接上vcc=5v的电源12,gnd接地,将循迹传感器的高低电平变换口d0口接到单片机的一个引脚io上,单片机不断读取io的电平状态,如果是得到低电平,那么判定为黑线,如果是高电平,那么判定为是相反的线。
70.通过设置指示灯4与方向灯5,使得喷药车1可以对各种不同的运动速度和方向,都有相应的指示显示,更具体的说,指示灯4一共有三盏灯,灯亮的盏数越多,表示喷药车1的前进的速度越快;
71.其中,方向灯5的电信号由at89c51单片机给出,速度显示灯电信号由at89c51单片机的gpio口给出;
72.设置显示屏8,喷药车1能够将自动记录的运行时间,利用nokia5110进行显示,其中,显示屏8的电信号由at89c51单片机的gpio口给出;
73.核心控制部分采用at89c51单片机,可以在不增加系统硬件的情况下方便地对系统进行二次开发,具有很好的拓展性。
74.在具体实施时,喷药车1的底部设置有驱动轮7、万向轮6及电机驱动模块,电机驱动模块与驱动轮7连接,且电机驱动模块与识别控制模块通讯连接;两个循迹模块对称设置在喷药车1的前端,每个循迹模块内均设有两个红外循迹传感器3,且每个红外循迹传感器3均与单片机电连接;指示灯4与显示屏8均安装在喷药车1的外壁上,方向灯5对称安装在喷药车1两侧外壁上。
75.如图2
‑
3所示,微型电脑主要连接着usb摄像头、水泵继电器和驱动轮7继电器,其中水泵继电器为控制喷药管道的开关,喷药管道的动力来源于水泵9,水泵9将药箱10中的农药抽出通过喷杆2喷出,由水泵继电器来控制水泵9的开关;驱动轮7继电器控制驱动轮7的通断电情况。
76.本发明的工作过程如下:
77.当识别到病叶的时候,微信电脑发送信号断开驱动轮7的继电器,由于驱动轮7的摩擦系数很大,所以当失去动力的短时间内,驱动轮7会停止转动使喷药车1停下来,接着微型电脑发送型号接通水泵继电器,进行喷药作业,喷药完成后,微型电脑断开水泵继电器,接通驱动轮7继电器,喷药车1继续沿着给定轨道前进,当重新检测到病叶的时候,重复执行上述步骤。
78.当未检测到病叶的时候,喷药车1继续保持沿着轨道前进。
79.其中,在识别病叶前,需要采集若干原始数据,其中,原始数据包括健康叶片图片与生病叶片图片;
80.对若干原始数据进行数据增强,其中,数据增强包括马赛克增强与图片融合算法;
81.对数据增强后的若干原始数据进行数据扩展,其中,数据扩展包括引入coco数据集或/和plantvillge数据集或/和imagenet中的一种或多种多样数据;
82.将数据增强与数据扩展后的若干原始数据输入yolov5模型中进行学习,得到病害图像识别模型。
83.其中,喷药车1继续保持沿着轨道前进包括;
84.在寻迹场地内预先用黑线标注出给定路线;
85.若四个红外循迹传感器3均未检测到黑线时,则喷药车1直线行驶;
86.若左右两边靠近中心的两个红外循迹传感器3检测到黑线时,则喷药车1进行小转弯;
87.若左右两边远离中心的两个红外循迹传感器3检测到黑线时,则喷药车1进行大转弯;
88.若喷药车1车身左边的红外循迹传感器3检测到黑线时,则喷药车1左轮减速,喷药车1车身向左修正;
89.若喷药车1车身右边的红外循迹传感器3检测到黑线时,则喷药车1右轮减速,喷药车1车身向右修正。
90.若喷药车1车身向左修正,则左侧方向灯5亮起;
91.若喷药车1车身向右修正,则右侧方向灯5亮起。
92.综上所述,喷药车1能够灵敏地检测出路面情况并且准确做出判断、动作喷药车1的运动控件为at89c51单片机,可以在不增加系统硬件的情况下方便地对系统进行二次开发,具有很好的拓展性;采用高阶残差和参数共享反馈的深度卷积神经网络,可用以精确识别与定位病叶,能够大大增加农药的喷洒效率,降低农药的使用成本,并尽可能减少健康叶片上的农药附着量。通过本系统的研发和使用,能够大大降低人力成本,降低生产成本。
93.以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。