1.本技术涉及深度技术领域,更具体而言,涉及一种光发射器、深度模组和终端。
背景技术:
2.垂直腔面发射器(vertical
‑
cavity surface
‑
emitting laser,vcsel)为一种半导体激光阵列,目前已广泛应用于深度模组,以实现目标对象的深度检测。vcsel与对应的驱动芯片一般同时设置在基板上,驱动芯片引出多根控制线,每根控制线连接vcsel上vcsel单元,从而通过驱动芯片实现对vcsel的控制,vcsel、驱动芯片及控制线占用基板的面积较大,从而使得基板的面积较大,不利于深度模组的小型化。
技术实现要素:
3.本技术实施方式提供一种光发射器、深度模组和终端。
4.本技术实施方式的光发射器包括第一衬底、发光模块和驱动模块。所述第一衬底包括相背的第一侧和第二侧;所述发光模块设置在所述第一侧,所述发光模块包括多个发光单元;及所述驱动模块设置在所述第二侧,所述驱动模块与所述发光模块电连接,以驱动所述发光单元发光。
5.本技术实施方式的深度模组包括光接收器和光发射器。所述光接收器用于接收所述光发射器发射并经目标对象反射的光线,以生成深度图像。所述光发射器包括第一衬底、发光模块和驱动模块。所述第一衬底包括相背的第一侧和第二侧;所述发光模块设置在所述第一侧,所述发光模块包括多个发光单元;及所述驱动模块设置在所述第二侧,所述驱动模块与所述发光模块电连接,以驱动所述发光单元发光。
6.本技术实施方式的终端包括机壳及深度模组。所述深度模组设置在所述机壳。所述深度模组包括光接收器和光发射器。所述光接收器用于接收所述光发射器发射并经目标对象反射的光线,以生成深度图像。所述光发射器包括第一衬底、发光模块和驱动模块。所述第一衬底包括相背的第一侧和第二侧;所述发光模块设置在所述第一侧,所述发光模块包括多个发光单元;及所述驱动模块设置在所述第二侧,所述驱动模块与所述发光模块电连接,以驱动所述发光单元发光。
7.本技术实施方式的光发射器、深度模组和终端中,发光模块和驱动模块分别设置在第一衬底的两侧,相较于驱动模块、发光模块和两者的走线部分均设置在第一衬底同一侧,占用面积较大而言,驱动模块和发光模块设置在第一衬底的两侧时,驱动模块和发光模块占据第一衬底的面积较少,有利于深度模组的小型化。
8.本技术的实施方式的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实施方式的实践了解到。
附图说明
9.本技术的上述和/或附加的方面和优点从结合下面附图对实施方式的描述中将变
得明显和容易理解,其中:
10.图1是本技术某些实施方式的光发射器的结构示意图;
11.图2是本技术某些实施方式的终端的结构示意图;
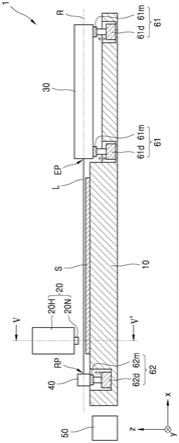
12.图3是本技术某些实施方式的深度模组的结构示意图;
13.图4是本技术某些实施方式的光发射器的平面示意图;
14.图5和图6是本技术某些实施方式的光发射器的结构示意图。
具体实施方式
15.下面详细描述本技术的实施方式,所述实施方式的示例在附图中示出,其中,相同或类似的标号自始至终表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施方式是示例性的,仅用于解释本技术的实施方式,而不能理解为对本技术的实施方式的限制。
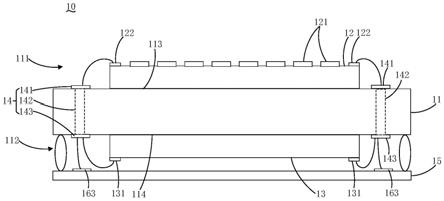
16.请参阅图1,本技术实施方式提供一种光发射器10。光发射器10包括第一衬底11、发光模块12和驱动模块13。第一衬底11包括相背的第一侧111和第二侧112;发光模块12设置在第一侧111,发光模块12包括多个发光单元121;及驱动模块13设置在第二侧112,驱动模块13与发光模块12电连接,以驱动发光单元121发光。
17.本技术实施方式的光发射器10中,发光模块12和驱动模块13分别设置在第一衬底11的两侧,相较于驱动模块13、发光模块12和两者的走线部分均设置在第一衬底11同一侧,占用面积较大而言,驱动模块13和发光模块12设置在第一衬底11的两侧时,驱动模块13和发光模块12占据第一衬底11的面积较少,有利于深度模组100的小型化。
18.请参阅图2,本技术实施方式的终端1000包括机壳200和深度模组100。深度模组100设置在机壳200上。机壳200可包括有侧壁201和位于底部的背板202,侧壁201和背板202形成有安装空间203,以用于收容终端1000的部件。可以理解,深度模组100设置在安装空间203内,当深度模组100需要生成目标对象的深度信息时,则可通过发射光线,并穿过背板202,以发射至目标对象,从而获取目标对象的深度信息。机壳200还能够为深度模组100提供防尘、防水及保护作用。
19.其中,机壳200的材质可以是金属、玻璃、塑胶等材质,机壳200的材质还可以是由金属、玻璃和塑胶混合而成。例如,侧壁201的材质为金属,背板202的材质为玻璃。又例如,侧壁201和部分背板202的材质为金属,其他部分背板202的材质为玻璃。
20.终端1000可以但不局限于是vr眼镜、ar眼镜、手机、平板电脑、笔记本电脑、智能手表、游戏机、头显设备、激光尺等,在这些电子设备中,往往具备深度模组100以实现生成目标对象的深度信息的功能。
21.请参阅图3,深度模组100包括光发射器10和光接收器20。光发射器10用于向目标对象发射光线,光接收器20用于接收目标对象反射的光线,以生成深度图像。深度图像用于表征目标对象的深度信息。
22.光发射器10可以是vcsel光源,vcsel光源具有体积小,连接效率高,输出功率灵活可调等优势。光发射器10还可以是边缘发射半导体激光器(edge
‑
emitting semiconductor lasers,eel)、和发光二极管(light emitting diode,led)等光发射器。这些光发射器10可以是由单个激光器或二极管构成的点光发射器10,还可以是由多个激光器或二极管构成的
阵列光发射器。本技术实施方式中的光发射器10为vcsel,可以理解,光发射器10并不限于vcsel。
23.光接收器20可包括互补金属氧化物半导体(complementary metal oxide semiconductor,cmos)图像传感器,通过接收光发射器10发出且经目标对象反射的结构光(如散斑结构光),与参考深度图像进行比对,从而生成目标对象的深度图像。
24.光接收器20可包括由单光子雪崩二极管(single photon avalanche diode,spad)组成的图像传感器,即图像传感器由多个单光子雪崩二极管阵列排布而成,从而基于飞行时间原理,即可生成目标对象的深度图像。其中,飞行时间原理为通过直接测量光发射器10发出光线的发射时间和单光子雪崩二极管接收反射光线的接收时间,以通过时间差,计算出目标对象和图像传感器40之间的距离,从而生成深度图像。本技术实施方式以光接收器20包括单光子雪崩二极管组成的图像传感器为例进行说明。
25.深度模组100还包括壳体30和透镜40。壳体30包括侧板31和顶板32,顶板32开设有第一开口321和第二开口322,透镜40可用于准直光发射器10发出的光线,以使得光发射器10发出的光线平行射向目标对象。第一开口321与光发射器10相对设置,光发射器10发出的光线经过透镜40后从第一开口321射出,第二开口322与光接收器20相对设置,光发射器10发出的光线经过目标对象反射后,经过第二开口322后被光接收器20接收,以生成深度图像。
26.请再次参阅图1,光发射器10包括第一衬底11、发光模块12、驱动模块13、导电组件14和电路板15。
27.第一衬底11包括相背的第一面113和第二面114,第一面113位于第一衬底11的第一侧111,第二面114位于第一衬底11的第二侧112。第一衬底11可以是陶瓷衬底、金刚石衬底或石墨烯衬底,具有良好的散热性能。
28.发光模块12设置在第一侧111,具体设置在第一面113上。发光模块12包括多个发光单元121和多个第一连接件122。
29.请结合图4,发光单元121为vcsel单元,多个发光单元121呈规则或不规则排布。例如,多个发光单元121呈矩阵排布,或者多个发光单元121随机排布。
30.发光单元121分为m组,每组包括n个发光单元121,每组的n个发光单元121依次连接,即每组n个发光单元121串联,m和n均为大于或等于1的整数。如图4所示,发光单元121分为10组,每组包括8个发光单元121,每组8个发光单元121串联。
31.第一连接件122为设置在发光模块12上,用于与驱动模块13连接的部件。第一连接件122可以是焊盘、引脚等可进行电性连接的部件。第一连接件122为多个,每个第一连接件122与q组发光单元121连接(如图4所示,一个第一连接件122与2组发光单元121连接),q也为大于或等于1的整数,即通过第一连接件122能够同时实现一组或多组发光单元121的发光控制。
32.第一连接件122连接的q组发光单元121同时发光,且间隔排布。第一连接件122接收发光信号,并传输到与其连接的q组发光单元121,从而实现q组发光单元121同时发光。如图4所示,多个发光单元121呈矩阵排列,每组发光单元121为矩阵的一列,由于每组发光单元121串联,因此,第一连接件122只需与每组发光单元121的其中一个连接即可,例如,1
‑
3列及6
‑
8列的第一行的发光单元121与第一连接件122连接,4
‑
5列及9
‑
10列的最后一行的发
光单元121与第一连接件122连接,从而使得多个第一连接件122交错排布在发光模块12的两端,相较于第一连接件122均设置在发光单元121的一端,排布较为密集而言,排布较为稀疏,可降低第一连接件122对应的信号之间的干扰。
33.相较于2列发光单元121相邻排布且同时发光时,相互之间的信号形成的干扰较大而言,将同时发光的2列发光单元121间隔排布,可进一步降低第一连接件122连接的不同列的发光单元121同时发光时,相互之间的信号干扰,从而挺好发光控制的准确性。
34.进一步地,连接不同的第一连接件122的多组发光单元121分时发光。由于连接同一第一连接件122的发光单元121间隔排布,相邻的多组发光单元121(如相邻的2列)连接的第一连接件122是不同的,为了防止相邻任意2列发光单元121之间的信号干扰,可控制相邻的2列分时发光(如第1列和第6列、与第2列和第7列分别在不同时刻发光),从而使得相邻的2列不会同时接收发光信号,相邻任意2列发光单元121之间的无信号干扰。
35.请再次参阅图1,驱动模块13设置在第二侧112,具体设置在第二面114。驱动模块13包括多个第二连接件131,第二连接件131为设置在驱动模块13上,用于与发光模块12连接的部件。第二连接件131可以是焊盘、引脚等可进行电性连接的部件。
36.第二连接件131为多个,每个第二连接件131可与一个或多个第一连接件122连接,即通过第二连接件131能够同时实现一个或多个第一连接件122对应的多组发光单元121的发光控制。本技术实施方式中,第二连接件131和第一连接件122一一对应,即每个第二连接件131与一个第一连接件122连接,以实现该第一连接件122对应的一组或多组发光单元121的发光控制。
37.导电组件14用于连接第一连接件122和第二连接件131,具体地,导电组件14贯穿第一衬底11的第一面113和第二面114,以连接第一连接件122和第二连接件131。
38.导电组件14包括第一焊盘141、导电件142和第二焊盘143,第一焊盘141设置在第一衬底11的第一面113,第一连接件122与第一焊盘141通过引线电性连接,第二焊盘143设置在第二侧112,例如,第二焊盘143设置在第二面114,第二连接件131与第二焊盘143通过引线电性连接。导电件142贯穿第一衬底11,以连接第一焊盘141和第二焊盘143,例如,第一衬底11开设有多个过孔,导电件142为铜线,通过在过孔镀铜的方式,连接第一焊盘141和第二焊盘143。
39.可以理解,在检测目标对象的深度时,光发射器10首先发出光线,光接收器20根据光发射器10发出光线的时间开始计时,在接收到目标对象反射的光线时,停止计时,从而得到时间差,以计算目标对象的深度。
40.然而,传统的光发射器10中,驱动芯片和光源设置在基板的同一表面,驱动芯片为了实现对vcsel更精确地控制,每个控制线连接的vcsel单元较少,甚至每个控制线仅控制一个vcsel单元,导致控制线的数量增加,控制线的走线更为复杂,长度也更长,走线中信号的传输时间增加,从而使得驱动芯片驱动vcsel单元发光的时间和vcsel单元实际发光的时间的时间差变大,进而使得光接收器20开始计时的时间的准确性较低,降低了深度检测精度。
41.另外,走线的数量增加及走线设计复杂化,导致走线占据的基板空间增大,不利于光发射器10的小型化,且信号同时在控制线内传输时,产生相互干扰的几率增加,导致信号损失甚至失真,进一步降低了深度检测精度。
42.本技术实施方式的光发射器10通过贯穿第一衬底11的导电组件14,连接分别设置在第一衬底11相背的第一面113和第二面114上的发光模块12和驱动模块13,导电组件14无需进行复杂的走线,只需在第一面113和第二面114分别设置多个第一焊盘141和第二焊盘143,以分别连接第一连接件122和第二连接件131,然后通过导电件142贯穿第一衬底11,以连接第一焊盘141和第二焊盘143,不仅走线设计较为简单,走线占据第一衬底11的面积基本为第一焊盘141所占的面积,导电组件14占用的面积较小,有利于光发射器10的小型化。
43.且走线的长度较短,基本等于第一衬底11的厚度,保证了驱动模块13驱动发光模块12发光的时间和发光单元121实际发光的时间的时间差较短,可提高光接收器20开始计时的时间的准确性,从而提高了深度检测精度。
44.另外,本技术中每个第一连接件122用于控制q组发光单元121,从而使得第一连接件122的数量较少,且第一连接件122对应的导电件142被第一衬底11隔开,可减少信号同时在多个第一连接件122对应的导电组件14内传输时,产生相互干扰的几率,降低信号损失,进一步提升深度检测精度。
45.电路板15用于安装第一衬底11,即第一衬底11安装在电路板15上,驱动模块13位于电路板15和第一衬底11之间。电路板15可以是柔性电路板、硬质电路板或软硬结合电路板。
46.第一衬底11能够通过焊接、卡合、螺合等方式固定安装在电路板15上,驱动模块13可与电路板15接触,但不电性连接(如在驱动模块13和电路板15之间设置绝缘层);或者驱动模块13与电路板15之间存在间隙,驱动模块13通过导电组件14与电路板15电性连接,例如,电路板15通过引线与第一衬底11的第二面114上的第二焊盘143电性连接。
47.请参阅图5,在其他实施方式中,光发射器10还包括第二衬底16,第二衬底16设置在第一衬底11上并位于第二侧112,第一衬底11和第二衬底16围成收容空间17,驱动模块13设置在第二衬底16上并位于收容空间17内,从而使得驱动模块13具有较大的走线空间,有利于驱动模块13的安装。第二衬底16可以是陶瓷衬底、金刚石衬底或石墨烯衬底,具有良好的散热性能。
48.第二衬底16包括基板161和侧壁162,侧壁162设置在基板161上,基板161、侧壁162和第一衬底11(具体为第一衬底11的第二面114)围成收容空间17,导电组件14贯穿第一衬底11和侧壁162,以连接第一连接件122和第二连接件131。如此,通过导电组件14贯穿第一衬底11和侧壁162,以连接驱动模块13和发光模块12,可简化驱动模块13和发光模块12的走线设计,减小光发射器10的面积和走线间的干扰。
49.具体地,第一焊盘141设置在第一面113,通过引线与第一连接件122连接,第二焊盘143设置在基板161并至少部分位于收容空间17,导电件142贯穿第一衬底11和侧壁162,以连接第一焊盘141和第二焊盘143,第二焊盘143位于收容空间17的部分通过引线与第二连接件131连接。
50.电路板15用于安装第二衬底16,即第二衬底16设置在电路板15上,电路板15位于第二衬底16远离第一衬底11的一侧。基板161靠近电路板15的一侧设置有多个第三连接件163,导电组件14可贯穿基板161,与第三连接件163连接。第三连接件163与电路板15电连接。
51.其中,导电组件14与第三连接件163的连接可以是:第二焊盘143通过过孔镀铜的
方式与第三连接件163连接,或者电路板15形成多层走线层,多层走线层相互连接,以连接导电组件14和第三连接件163。
52.电路板15可设置有多个第四连接件151,在第二衬底16设置在电路板15上后,第四连接件151与第三连接件163一一对应设置并电性连接,以实现驱动模块13和电路板15上的电容、电阻等元器件的连接。第三连接件163和第四连接件151均可以是焊盘、引脚等能够实现电性连接的部件。
53.请参阅图6,在一个实施方式中,电路板15不设置第三连接件163,而是直接通过导电组件14与电路板15的第四连接件151连接。具体为,第四连接件151设置在电路板15上,并位于基板161在电路板15的正投影之外,导电组件14(如第二焊盘143、导电件142)可贯穿侧壁162,以与第四连接件151连接,如第二焊盘143部分凸出侧壁162,然后通过引线连接该部分与第四连接件151。
54.以图4和5所示的光发射器10为例,在进行深度检测时,驱动模块13发出发光信号,发光信号经过第二连接件131、第二焊盘143、导电件142和第一焊盘141后,传输到第一连接件122,然后传输到第一连接件122对应的2组发光单元121,以驱动该2组发光单元121发光,然后分时依次驱动其他4个第一连接件122对应的2组发光单元121进行发光,发光单元121发出的光线经目标对象反射后,被光接收器20接收,从而根据发光时间和接收时间的时间差计算目标对象的深度信息,以实现目标对象的深度检测。
55.如此,通过堆叠设置的发光模块12和驱动模块13,简化发光模块12和驱动模块13的走线设计,从而减少光发射器10的面积,有利于光发射器10的小型化,且通过分时发射不同第一连接件122对应的q组间隔分布的发光单元121,可降低不同组发光单元121发光时的信号干扰,提高发光控制的准确性,有利于提升深度检测精度。
56.在本说明书的描述中,参考术语“某些实施方式”、“一个实施方式”、“一些实施方式”、“示意性实施方式”、“示例”、“具体示例”、或“一些示例”的描述意指结合实施方式或示例描述的具体特征、结构、材料或者特点包含于本技术的至少一个实施方式或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施方式或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施方式或示例中以合适的方式结合。
57.在本技术的描述中,需要理解的是,术语“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个所述特征。在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
58.在本技术的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接或可以相互通讯;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术
人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
59.在本技术中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
60.尽管上面已经示出和描述了本技术的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本技术的限制,本领域的普通技术人员在本技术的范围内可以对上述实施例进行变化、修改、替换和变型,本技术的范围由权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。