技术特征:
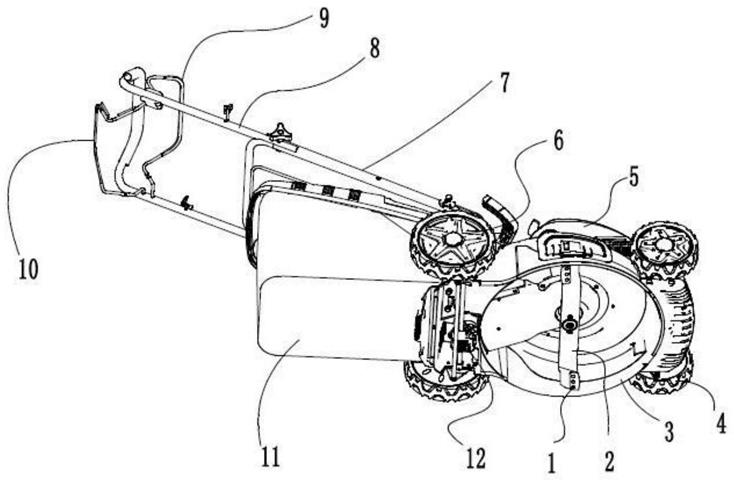
1.一种用于割草的设备(10)、优选自主机器人设备,其具有:用于割草的多个切割装置(20);多个承载臂(22),其相对于所述设备(10)的横向轴线彼此偏移地布置,并且被安装成使得它们分别能够单独地上下枢转,并且分别承载所述多个切割装置(20)中的相应一个;以及多个支撑元件(24),其分别将所述多个承载臂(22)中的相应一个支撑在底表面上,并且相对于所述设备(10)的向前移动方向(v)布置在相应的切割装置(20)的前方。2.根据权利要求1所述的设备(10),其中,所述多个支撑元件(24)被配置为滑橇,所述滑橇优选成号角形和/或弯曲形。3.根据权利要求1或2所述的设备(10),其中,所述多个支撑元件(24)可旋转地连接到相应的承载臂(22),所述多个支撑元件(24)的相应的旋转轴线优选地相对于所述设备(10)的竖直轴线平行或倾斜地延伸,特别是优选地以相对于向前移动方向(v)向前倾斜的方式延伸。4.根据前述权利要求中任一项所述的设备(10),其中,所述设备(10)还具有:主体(12)或框架,所述多个承载臂(22)安装在所述主体(12)或框架上,使得所述多个承载臂(22)能够分别单独地上下枢转,驱动元件(16)、优选轮或履带式驱动器附接到所述主体(12)或框架,所述驱动元件(16)驱动地连接到所述设备(10)的驱动单元。5.根据前述权利要求中任一项所述的设备(10),其中,枢转支承结构和所述多个支撑元件(24)分别布置在所述多个承载臂(22)的相反的端部区域上。6.根据前述权利要求中任一项所述的设备(10),其中,所述多个切割装置(20)分别具有至少一个切割元件(32),所述切割元件(32)能够围绕相应的切割装置(20)的切割轴线旋转,所述切割轴线相对于所述设备(10)的竖直轴线倾斜地延伸、优选地以相对于向前移动方向(v)向前倾斜的方式延伸。7.根据前述权利要求中任一项所述的设备(10),其中,所述多个切割装置(20)分别具有通过分割界(34)彼此分隔开的固定部分(28)和可旋转部分(30);所述固定部分(28)的邻近所述分割界(34)的区域在远离所述分割界(34)的方向上渐缩;以及所述可旋转部分(30)的邻近所述分割界(34)的区域在远离所述分割界(34)的方向上渐缩。8.根据前述权利要求中任一项所述的设备(10),其中,所述设备(10)还具有:多个承载臂预应力元件(26)、优选为弹簧,所述多个承载臂预应力元件分别被分配给所述多个支撑臂(22)中的相应一个并且对相应的承载臂(22)预加应力以用于向上枢转、优选地用于释放相应的支撑元件(24)和/或底表面。9.根据前述权利要求中任一项所述的设备(10),其中,所述设备(10)还具有:至少一个触觉传感器臂(50),其在所述设备(10)的纵向外侧上优选地被布置成使得它能够内外枢转,用于触觉检测所述设备(10)与所述设备(10)旁边的物体(52)之间的间距(a),
在所述设备(10)的两个纵向外侧上分别优选地包括相应一个触觉传感器臂(50)。10.根据权利要求9所述的设备(10),其中,所述设备(10)还具有:至少一个传感器臂预应力元件(46),其对所述至少一个触觉传感器臂(50)预加应力以用于向外枢转;和/或电驱动器、优选为电万向节驱动器,其驱动地连接到所述至少一个触觉传感器臂(50),用于将所述至少一个触觉传感器臂(50)向外枢转,一机构、特别地优选单级行星齿轮机构、正齿轮机构和/或带机构布置在所述电驱动器与所述触觉传感器臂之间。11.根据权利要求9或10所述的设备(10),其中,所述设备(10)还具有:角度传感器(54),其被配置成能够检测所述至少一个触觉传感器臂(50)的枢转角(α)。12.根据权利要求9至11中任一项所述的设备(10),其中,所述设备(10)还具有:控制单元(56),其被配置成:能够基于所述至少一个触觉传感器臂(50)的枢转角(α)和/或所述至少一个触觉传感器臂(50)的枢转运动的角速度来确定与所述物体(52)的间距(a),所述控制单元(56)还优选地被配置成:能够基于所确定的间距(a)来导航所述设备(10)。13.根据前述权利要求中任一项所述的设备(10),其中,所述设备(10)还具有:至少一个吊杆(36),其能够在所述设备(10)的纵向外侧上内外枢转,并且具有用于割草的另外的切割装置(40),所述至少一个吊杆(36)优选地被预加应力以用于向外枢转;和/或所述至少一个吊杆(36)优选地具有可旋转的滚动元件(44),所述可旋转的滚动元件(44)优选为圆形,以用于在所述设备(10)旁边的物体(52)上滚动。14.根据权利要求13所述的设备(10),其中,滚动元件(44)布置在所述另外的切割装置(40)上方,和/或滚动元件(44)的外径大于所述另外的切割装置(40)的外径。15.根据权利要求13或14所述的设备(10),其中,所述吊杆(36)附加地被安装成使得其能够上下枢转,所述吊杆(36)具有另外的支撑元件(42),所述另外的支撑元件优选地被配置为滑橇,用于将所述吊杆(36)支撑在底表面上,并且所述吊杆优选地被预加应力以用于向上枢转。
技术总结
本发明涉及一种用于割草的设备(10)、优选自主机器人设备。设备(10)具有用于割草的多个切割装置(20)。设备(10)具有多个承载臂(22),所述多个承载臂(22)相对于设备(10)的横向轴线彼此偏移地布置,并且被支撑成使得它们可以分别单独地上下枢转,并且分别承载多个切割装置(20)中的一个。设备(10)具有多个支撑元件(24),其分别将多个承载臂(22)中的相应一个支撑在底表面上,并且相对于设备(10)的向前移动方向(V)布置在相应的切割装置(20)的前方。设备(10)可以具有的优点在于,前导的支撑元件(24)不会推动它们前面的任何切割物,并且降低了设备(10)被顶起的风险。了设备(10)被顶起的风险。了设备(10)被顶起的风险。
技术研发人员:J
受保护的技术使用者:布吕格利公司
技术研发日:2020.02.10
技术公布日:2021/10/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。