1.本发明涉及一种停靠站及具有该停靠站的自主作业系统。本发明还涉及一种自主作业系统的使用方法。
背景技术:
2.现有的自主作业系统包括自主作业设备和停靠站。以主要功能为修剪草坪的自主作业系统为例,其包括智能割草机和停靠站,停靠站通常通过地钉牢固地固定在草坪上。由于草坪的生长存在周期性的季节性差异,特别地在低温的秋冬季节,草坪通常处于生长停滞或枯萎状态,所以每年会有连续几个月的时间不需要智能割草机进行工作。由于智能割草机便于搬运,所以在秋冬季节,用户通常会将智能割草机收回到室内保存,以避免恶劣天气缩短其使用寿命,同时降低了被盗的风险。但是,由于停靠站被钉在草坪上,安装和拆卸都相对繁琐,所以会常年暴露在室外环境,一方面,需要面临使用寿命短或者增加成本提高其耐候性的挑战,另一方面,也增加了被盗的风险。
技术实现要素:
3.为解决上述技术问题,本发明提供一种停靠站,包括第一结构件、第二结构件和停靠站控制组件,所述第一结构件可固定在工作面上,所述第一结构件和所述第二结构件可拆卸地连接,所述第二结构件包括内腔,所述停靠站控制组件收容在所述内腔中,且所述停靠站控制组件封闭在所述内腔中。
4.作为本发明的一具体实施方式,优选的,所述第一结构件包括第一连接部,所述第一连接部构造为用于将所述第一结构件固定在所述工作面上。
5.作为本发明的一具体实施方式,优选的,所述第一结构件包括第二连接部,所述第二结构件包括第三连接部,所述第二连接部与所述第三连接部构造为相互配合地将所述第一结构件和所述第二结构件可拆卸地连接在一起。
6.作为本发明的一具体实施方式,优选的,所述第二结构件包括第一壳体和第二壳体,所述第一壳体和所述第二壳体可拆卸地连接;所述第一壳体的至少一部分与所述第二壳体的至少一部分配合形成所述内腔。
7.作为本发明的一具体实施方式,优选的,所述第三连接部构造在所述第二壳体上;所述停靠站控制组件与所述第二壳体连接。
8.作为本发明的一具体实施方式,优选的,所述停靠站控制组件包括充电电路,所述第二结构件还包括充电端子,所述充电端子至少部分地收容于所述内腔,所述充电端子的一端与所述充电电路电性连接,所述充电端子的另一端伸出到所述内腔之外;或,所述停靠站控制组件包括充电电路,所述停靠站还包括无线充电发射模块,所述无线充电发射模块收容于所述内腔,所述无线充电发射模块与所述充电电路典型连接。
9.作为本发明的一具体实施方式,优选的,所述第二结构件还包括边界线接口,所述停靠站控制组件还包括信号发生电路,所述边界线接口与所述信号发生电路电性连接。
10.采用本发明的技术方案,能够有效地解决背景技术部分所述的技术问题。
11.为解决上述技术问题,本发明还提供一种停靠站,包括第一结构件、第二结构件和停靠站控制组件,所述第二结构件包括内腔,所述停靠站控制组件收容在所述内腔中;所述停靠站包括:第一状态,所述第一结构件可固定在工作面上,所述第二结构件与所述第一结构件连接;第二状态,所述第一结构件可固定在工作面上,所述第二结构件与所述第一结构件分离。
12.为解决上述技术问题,本发明还提供一种停靠站,包括第一结构件、第二结构件和停靠站控制组件,所述第二结构件包括第一壳体和第二壳体,所述第一壳体的至少一部分和所述第二壳体的至少一部分配合形成所述第二结构件的内腔,所述停靠站控制组件收容且封闭在所述内腔中;所述停靠站包括:第一状态,所述第一结构件可固定在工作面上,所述第二结构件与所述第一结构件连接;第二状态,所述第一结构件可固定在工作面上,所述第二结构件与所述第一结构件分离;第三状态,所述第一结构件可固定在工作面上,所述第二壳体与所述第一结构件连接,所述第一壳体与所述第一结构件和/或第二壳体分离。
13.为解决上述技术问题,本发明还提供一种自主作业系统,包括自主作业设备和上述的停靠站,所述自主作业设备优选为智能割草机。
14.作为本发明的一具体实施方式,优选的,所述自主作业系统包括使用形态和储藏形态;当所述自主作业系统处于使用形态时,所述自主作业设备被配置为在工作区域作业或停靠,所述停靠站被配置为在工作区域固定安装;当所述自主作业系统处于储藏形态时,所述自主作业设备和所述第二结构件被配置为在储藏区域储藏。
15.为解决上述技术问题,本发明还提供一种如自主作业系统的使用方法,所述自主作业系统包括使用形态和储藏形态,所述第一结构件固定安装在所述工作区域;所述方法包括,所述自主作业系统从使用形态向储藏形态转换时,将所述自主作业设备转移到储藏区域,并且将所述第二结构件从所述第一结构件上拆卸后转移到储藏区域。
16.作为本发明的一具体实施方式,优选的,所述方法还包括所述自主作业系统从所述储藏形态向所述使用形态转换时,将所述自主作业设备转移到所述工作区域,并且将所述第二结构件转移到所述工作区域并安装在所述第一结构件上。
附图说明
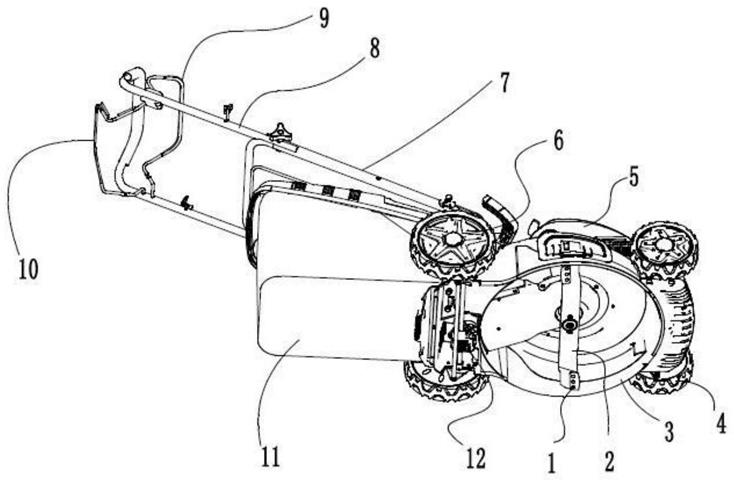
17.图1是本发明一具体实施方式中自主作业系统的示意图。
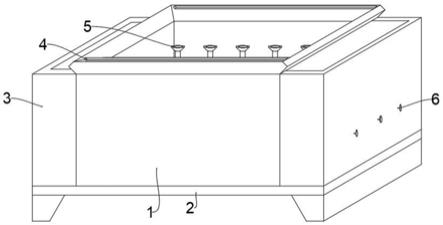
18.图2是本发明一具体实施方式中停靠站第一状态的示意图。
19.图3是本发明一具体实施方式中停靠站第二状态的示意图。
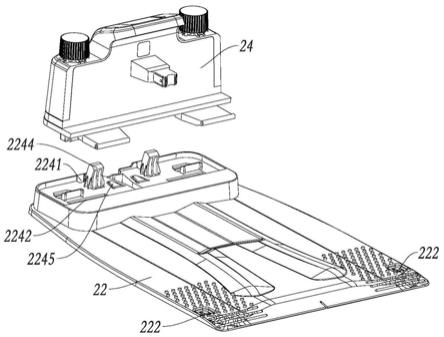
20.图4是本发明一具体实施方式中充电柱的示意图。
21.图5是本发明一具体实施方式中停靠站第三状态的示意图。
具体实施方式
22.以下将结合附图所示的具体实施方式对本发明进行详细描述。但这些实施方式并不限制本发明,本领域的普通技术人员根据这些实施方式所做出的结构、方法、或功能上的变换均包含在本发明的保护范围内。
23.需要理解的是,在本发明具体实施方式的描述中,“第一”、“第二”等术语仅用于描
述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者多个该特征。
24.在本发明具体实施方式中,除非另有明确的规定和限定,“相连”、“连接”等术语应做广义理解,例如,可以是固定连接,也可以是活动连接,还可以是可拆卸连接,或成一体;可以是直接相连,也可以通过中间媒介间接相连;可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
25.在本发明具体实施方式中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。
26.在本发明具体实施方式中,除非另有明确的规定和限定,术语“多”是指两个或两个以上。
27.参考图1,本实施例提供了一种自主作业系统100,包括自主作业设备10、停靠站20和边界30。
28.所述自主作业设备10尤其是可自主地在预设区域内移动并执行特定作业的机器人,典型的如执行清洁作业的智能扫地机/吸尘器,或执行割草作业的智能割草机等。其中,所述特定作业尤其指对工作面进行处理、使工作面的状态发生改变的作业。本发明以智能割草机为例进行详细说明。所述自主作业设备10可自主行走于工作区域的表面上,尤其作为智能割草机可自主地在地面上进行割草作业。自主作业设备10至少包括主体机构、移动机构、工作机构、能源模块、检测模块、交互模块、控制模块等。
29.所述主体机构通常包括底盘和外壳,所述底盘用于安装和容纳移动机构、工作机构、能源模块、检测模块、交互模块、控制模块等功能机构与功能模块。所述外壳通常构造为至少部分地包覆所述底盘,主要起到增强自主作业设备10美观和辨识度的作用。在本实施例中,所述外壳构造为在外力作用下可相对于所述底盘平移和/或旋转,配合适当的检测模块,示例性地如霍尔传感器,可进一步地起到感知碰撞、抬起等事件的作用。
30.所述移动机构构造为用于将所述主体机构支撑于地面并驱动所述主体机构在地面上移动,通常包括轮式移动机构、履带式或半履带式移动机构和步行式移动机构等。在本实施例中,所述移动机构为轮式移动机构,包括至少一个驱动轮和至少一个行走原动机。行走原动机优选为电动机,在其他实施方式中也可为内燃机或使用其他类型能源产生动力的机械。在本实施例中,优选地设置一左驱动轮、一驱动所述左驱动轮的左行走原动机、一右驱动轮和一驱动所述右驱动轮的右行走原动机。在本实施例中,所述自主作业设备的直线行进通过左右两个驱动轮同向等速转动实现,转向行进通过左右两个驱动轮的同向差速或相向转动实现。在其他实施方式中,移动机构还可包括独立于所述驱动轮的转向机构和独立于所述行走原动机的转向原动机。在本实施中,所述移动机构还包括至少一个从动轮,所述从动轮典型地构造为万向轮,所述驱动轮和所述从动轮分别位于自主作业设备的前后两端。
31.所述工作机构构造为用于执行具体的作业任务,包括工作件和驱动所述工作件运行的工作原动机。示例性地,对于智能扫地机/吸尘器,所述工作件包括滚刷、吸尘管和集尘室等;对于智能割草机,所述工作件包括切割刀片或切割刀盘,进一步地还包括用于调节割
草高度的高度调节机构等优化或调整割草效果的其他部件。所述工作原动机优选为电动机,在其他实施方式中也可为内燃机或使用其他类型能源产生动力的机械。在另外的一些实施方式中,工作原动机和行走原动机110构造为同一个原动机。
32.所述能源模块构造为用于为自主作业设备10的各项工作提供能量。在本实施例中,所述能源模块包括电池和充电连接结构,其中电池优选为可充电电池,充电连接结构优选为可暴露于自主作业设备外的充电电极。
33.所述检测模块构造为感知自主作业设备100所处环境参数或其自身工作参数的至少一种传感器。典型地,检测模块可包括与工作区域限定有关的传感器,例如磁感应式、碰撞式、超声波式、红外线式、无线电式等多种类型,其传感器类型与对应的信号发生装置的位置和数量相适应。检测模块还可包括与定位导航相关的传感器,例如gps定位装置、激光定位装置、电子罗盘、地磁传感器等。检测模块还可包括与自身工作安全性相关的传感器,例如障碍物传感器、抬升传感器、电池包温度传感器等。检测模块还可包括与外部环境相关传感器,例如环境温度传感器、环境湿度传感器、加速度传感器、光照传感器、雨淋传感器等。
34.所述交互模块构造为至少用于接收用户输入的控制指令信息、发出需要用户感知的信息、与其他系统或设备通信以收发信息等。在本实施例中,交互模块包括设置在自主作业设备10上的输入装置,用于接收用户输入的控制指令信息,典型地如控制板、急停按键等;交互模块还包括设置在自主作业设备10上的显示屏和/或蜂鸣器,通过发光或发声使用户感知信息。在其他实施方式中,交互模块包括设置在自主作业设备10上的通信模块和独立于自主作业设备10的终端设备,例如手机、电脑、网络服务器等,用户的控制指令信息或其他信息可在终端设备上输入、经由有线或无线通信模块到达自主作业设备10。
35.所述控制模块通常包括至少一个处理器和至少一个非易失性存储器,所述存储器内存储有预先写入的计算机程序或指令集,处理器根据所述计算机程序或指令集控制自主作业设备10的移动、工作等动作的执行。进一步地,所述控制模块还能够根据检测模块的信号和/或用户控制指令控制和调整自主作业设备10的相应行为、修改所述存储器内的数据等。
36.所述边界30用于限制所述机器人系统的工作区域,通常包括外边界和内边界。自主作业设备10被限定在所述外边界之内、所述内边界之外或所述外边界与内边界之间移动并工作。所述边界可以是实体的,典型地如墙壁、篱笆、栏杆等;所述边界也可以是虚拟的,典型地如由边界信号发生装置发出虚拟边界信号,所述虚拟边界信号通常为电磁信号或光信号,或针对设有定位装置(如gps等)的自主作业设备10而言,在示例性地由二维或三维坐标形成的电子地图中设置的虚拟边界。
37.所述停靠站20通常构造在边界30上或边界30内,供自主作业设备10停泊,特别是能够向停泊在停靠站的自主作业设备10供给能量。
38.本发明一具体实施方式提供了一种停靠站20,包括第一结构件、第二结构件和停靠站控制组件。其中,第一结构件可固定在工作面上,第二结构件与第一结构件可拆卸地连接,停靠站控制组件收容在所述第二结构件内部。参考图2~图5,所述第一结构件示例性地构造为底板22,所述底板22构造为大致沿工作面延伸的平板结构。所述底板22包括第一连接部222和第二连接部224。
39.所述第一连接部222构造为用于将所述的底板22固定在草坪上,优选地将所述底板22锚固在草坪上。在附图所示的实施例中,第一连接部222构造为贯穿所述底板22上下表面的钉孔,地钉可穿过所述钉孔后插入草坪,将底板22固定在草坪上。地钉的结构为本领域技术人员所熟知,故不再赘述。在其他的实施方式中,第一连接部222可构造为与所述底板222一体成型的地钉。所述第二结构件示例性地构造为充电柱24,所述充电柱24包括第三连接部246。第二连接部224与第三连接部246构造为相互配合地用于将所述底板22和所述充电柱24可拆卸地连接在一起。
40.第二连接部224与第三连接部246的具体结构,在本技术的申请人提交的另外的专利申请(cn202010104901.0,cn202020189775.9,cn202020189820.0,后文称“引用文献”)中已经充分揭示。典型地,第二连接部224包括安装槽2241(具体结构和作用由引用文献中的第二安装槽1113和凸起1114、第二安装槽1113a揭示),第三连接部246相应地包括卡勾2461(具体结构和作用由引用文献中的卡勾1213、卡勾1213a揭示);第二连接部224还包括第一安装槽2242(具体结构和作用由引用文献中的第一安装槽1112和第三安装槽1116、第一安装槽1112a和第三安装槽1116a揭示),第三连接部246相应地包括延伸部2462(具体结构和作用由引用文献中的延伸部1211和转轴1212、延伸部1211a和转轴1212a揭示);第二连接部224还包括柱体2244(具体结构和作用由引用文献中的柱体113揭示),第三连接部246相应地包括柱体收容腔2464(具体结构和作用由引用文献中的主体收容腔123和后侧壁1231揭示);第二连接部224还包括弹性件2245(具体结构和作用由引用文献中的弹性件1115揭示)。虽然本技术与引用文献中的结构不完全相同,但这些差别对于本领域技术人员来说是微小的。采用上述结构,用户可以便捷地将充电柱24从底板22上拆下,当长期不使用智能割草机时,可以将智能割草机和充电柱24收回到室内储存,仅将不易损坏且价格低廉的底板22留在草坪上;当再次需要使用智能割草机时,用户可以便捷地将充电柱24安装在底板22上。
41.所述充电柱24包括内腔,所述停靠站控制组件收容在所述内腔中。优选地,所述停靠站控制组件被封闭在所述内腔中,所述“封闭在所述内腔中”是指只有将围合形成所述内腔的结构破坏或非破坏性地拆卸后,才能将所述停靠站控制组件从所述内腔中取出。进一步优选地,所述“封闭在所述内腔中”是指只有将围合形成所述内腔的结构破坏或非破坏性地拆卸后,才能用手触及所述停靠站控制组件。采用上述结构,当用户将充电柱24从底板22上拆下后,停靠站控制组件仍然被封闭在内腔中,防止意外触及停靠站控制组件造成其损坏。
42.在本实施例中,参考图5,所述充电柱24包括第一壳体242和第二壳体244,所述第一壳体242和所述第二壳体244可拆卸地连接。在本实施例中,所述第一壳体242和所述第二壳体244通过卡勾卡槽的配合连接。在其他实施例中,所述第一壳体242和所述第二壳体244还可通过螺钉连接。
43.在本实施例中,所述第三连接部246全部构造在所述第二壳体244上。这样,当需要对停靠站控制组件进行维修或更换时,只需将第一壳体242从第二壳体244上拆下即可。在其他的实施方式中,第三连接部246可全部构造在所述第一壳体242上,也可部分地构造在第一壳体242上、部分地构造在第二壳体244上。在本实施中,停靠站控制组件构造为与所述第二壳体244连接。在其他的实施例中,停靠站控制组件也可与所述第一壳体242连接。
44.在本实施例中,停靠站控制组件构造为控制板26,所述控制板26包括充电电路,用于控制对智能割草机的充电,示例性地包括检测智能割草机是否处于可充电位置、控制充电电流、控制充电电压、控制充电时间等。所述充电柱24还包括安装座280,所述控制板26固定与所述安装座280,所述安装座280至少部分地收容于所述充电柱24的内腔并与所述充电柱24连接。在本实施例中,所述停靠站20还包括充电端子282,所述充电端子282构造为金属触片,其一端与所述充电电路电性连接,其另一端伸出到所述充电柱24的内腔外,用于与智能割草机的充电端子配接以向智能割草机的电池充电。在其他实施例中,所述停靠站20包括无线充电发射模块,所述无线充电发射模块收容于所述充电柱24的内腔中且与所述控制板26电性连接。
45.在本实施例中,所述安装座280还包括边界线接口284,所述控制板26还包括信号发生电路,所述自主作业系统的边界由形成闭合回路的导线构成。所述边界线接口284与所述信号发生电路电性连接。所述导线的两端分别与所述边界线接口284可拆卸地连接。采用上述结构,当需要收回充电柱24时,可先将导线的两端从边界线接口284上拆下,再将充电柱24从底板22上拆下。
46.采用上述结构的停靠站20可选择地呈现出三种状态。第一状态时,底板22固定在草坪上,充电柱24连接在底板22上,导线连接在边界线接口284,此时智能割草机可在由导线围合形成的工作区域内行走并割草,当智能割草机满足预设条件,示例性地如电池包电量不足时,可回到停靠站20进行充电,具体地,智能割草机的移动机构承载于底板22上,智能割草机的充电端子与停靠站20的充电端子连接。第二状态时,底板22固定在草坪上,充电柱24与底板22分离,用户可将充电柱24收回室内储存。第三状态时,底板22固定在草坪上,第二壳体244与底板22连接,第一壳体242与第二壳体244和/或底板22分离,此时控制板26暴露,便于维护或更换。
47.本实施方式还提供了一种自主作业系统100的使用方法,所述自主作业系统100包括使用形态和储藏形态。典型地,在温度和湿度适宜草坪快速生长的季节,例如春夏季节,自主作业系统100处于使用形态,此时停靠站20固定在工作区域并处于所述第一状态,并与电源和边界导线连接,割草机器人在由通电的边界导线限定的区域内作业,或在停靠站20停靠和/或充电;在温度和湿度不适宜草坪生长的季节,例如秋冬季节,自主作业系统100处于储藏形态,此时停靠站20处于所述第二状态,停靠站20和割草机器人通常均不通电。通常存在一储藏区域,所述储藏区域示例性地构造为够提供相对稳定的环境,避免诸如雨雪侵扰等不利环境的影响,典型的储藏区域为室内,例如全封闭或半封闭的仓库、地下室、起居室等。
48.当需要将所述自主作业系统100从使用形态向储藏形态转换时,将所述割草机器人转移到储藏区域,并且将所述第二结构件从所述第一结构件上拆卸后转移到储藏区域。割草机器人的转移和第二结构件的拆卸可以是不限定顺序地先后进行;割草机器人的转移和第二结构件的转移可以是不限定顺序地先后进行,也可以是同时进行。具体地,可以先转移割草机器人,再拆卸第二结构件,再转移第二结构件;也可以先拆卸第二结构件,再转移第二结构件,再转移割草机器人;还可以先拆卸第二结构件,再同时转移第二结构件和割草机器人。采用上述方法,可以确保在储藏形态时,自主作业系统100的电子设备被转移到相对稳定的环境当中,充分地保障了产品的稳定性和使用寿命。当需要将所述自主作业系统
100从所述储藏形态向所述使用形态转换时,将所述割草机器人转移到所述工作区域,并且将所述第二结构件转移到所述工作区域并安装在所述第一结构件上。割草机器人的转移和第二结构件的转移可以是不限定顺序地先后进行,也可以是同时进行;割草机器人的转移和第二结构件的安装,可以是不限定顺序地先后进行。具体地,可以先转移割草机器人,再转移第二结构件,再安装第二结构件;也可以先转移第二结构件,再安装第二结构件,再转移割草机器人;还可以先同时转移第二结构件和割草机器人,再拆卸第二结构件。
49.应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施方式中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
50.上文所列出的一系列的详细说明仅仅是针对本发明的可行性实施方式的具体说明,它们并非用以限制本发明的保护范围,凡未脱离本发明技艺精神所作的等效实施方式或变更均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。