1.本说明书中公开的发明涉及一种发动机控制电路。
背景技术:
2.以往的发动机控制电路中,有从逆变器的直流母线电流检测相电流并以矢量控制方式驱动交流发动机的情况(例如参照专利文献1)。
3.[背景技术文献]
[0004]
[专利文献]
[0005]
[专利文献1]日本专利第6129972号说明书
技术实现要素:
[0006]
[发明所要解决的问题]
[0007]
然而,在以往的发动机控制电路中,就确保电流检测期间而言,存在值得进一步讨论的余地。
[0008]
本说明书中公开的发明是鉴于本案发明者发现的所述问题而完成的,目的在于提供一种能够确保电流检测期间的发动机控制电路。
[0009]
[解决问题的技术手段]
[0010]
为了达成所述目的,本说明书中公开的发动机控制电路设为如下构成(第1构成),例如具有:电压指令产生部,从驱动交流发动机的逆变器的直流母线电流检测相电流并产生3相电压指令;及pwm信号产生部,根据3相所述电压指令与特定频率的三角波信号的比较结果产生3相pwm[pulse width modulation:脉冲宽度调制]信号并输出到所述逆变器;且所述pwm信号产生部以如下方式修正所述最大或最小的电压指令,即,在连续的多个pwm周期中的第1周期使最大或最小的电压指令与中间的电压指令一致,在第2周期使所述最大或最小的电压指令与所述中间的电压指令的差量为特定值以上,且在所述多个pwm周期的整个周期将总修正量设为零。
[0011]
此外,在包含所述第1构成的发动机控制电路中,也可以设为如下构成(第2构成):所述pwm信号产生部以如下方式修正所述最大或最小的电压指令,即,在与所述第1周期的前后连续的所述第2周期中的其中一个周期使所述pwm信号向第1方向移位,在另一个周期使所述pwm信号向与所述第1方向为相反方向的第2方向移位。
[0012]
另外,在包含所述第1或第2构成的发动机控制电路中,也可以设为构成(第3构成):所述pwm信号产生部以如下方式修正所述最大或最小的电压指令,即,在所述第2周期的前半及后半中的其中一半使所述最大或最小的电压指令与所述中间的电压指令的差量为所述特定值以上,在另一半使所述第2周期整体的修正量接近零。
[0013]
另外,在包含所述第1至第3中任一构成的发动机控制电路中,也可以设为如下构成(第4构成):所述pwm信号产生部允许基于修正所产生的所述最大或最小的电压指令与所述中间的电压指令的逆转。
[0014]
另外,在包含所述第1至第3中任一构成的发动机控制电路中,也可以设为如下构成(第5构成):所述pwm信号产生部不允许基于修正所产生的所述最大或最小的电压指令与所述中间的电压指令的逆转。
[0015]
另外,在包含所述第1至第5中任一构成的发动机控制电路中,也可以设为如下构成(第6构成):所述pwm信号产生部在所述最大或最小的电压指令与所述中间的电压指令的差量为所述特定值以上时,不修正所述最大或最小的电压指令。
[0016]
另外,在包含所述第1至第6中任一构成的发动机控制电路中,也可以设为构成(第7构成):所述电压指令产生部以矢量控制方式产生3相所述电压指令。
[0017]
另外,在包含所述第7构成的发动机控制电路中,也可以设为如下构成(第8构成),即,所述电压指令产生部包含:ad[analog
‑
to
‑
digital:模拟
‑
数字]转换部,在从所述pwm信号产生部指示的电流检测时点将模拟的所述直流母线电流转换为数字的第1电流值;克拉克转换部,将3相所述第1电流值转换为2相第2电流值;帕克转换部,将固定坐标系的所述第2电流值转换为旋转坐标系的第3电流值;pi(proportional integral:比例积分)控制部,导出用于将所述第3电流值修正为目标值的第1电压值;反帕克转换部,将旋转坐标系的所述第1电压值转换为固定坐标系的第2电压值;及反克拉克转换部,将2相所述第2电压值转换为3相所述电压指令。
[0018]
另外,本说明书中公开的发动机装置设为如下构成(第9构成):具有包含所述第1至第8中任一构成的发动机控制电路、连接于所述发动机控制电路的逆变器、及连接于所述逆变器的交流发动机。
[0019]
此外,在包含所述第9构成的发动机装置中,也可以设为如下构成(第10构成):所述逆变器包含检测所述直流母线电流的单一分流电阻。
[0020]
[发明的效果]
[0021]
根据本说明书中公开的发明,可提供一种能够确保电流检测期间的发动机控制电路。
附图说明
[0022]
图1是表示发动机装置的整体构成的图。
[0023]
图2是表示相电流检测处理的一例的图。
[0024]
图3是表示脉冲移位处理的基本动作的图。
[0025]
图4是表示脉冲移位处理的第1实施方式的图。
[0026]
图5是表示脉冲移位处理的第2实施方式的图。
[0027]
图6是表示脉冲移位处理的第3实施方式的图。
[0028]
图7是表示脉冲移位处理的第4实施方式的图。
[0029]
图8是表示脉冲移位处理的第5实施方式的图。
具体实施方式
[0030]
<发动机装置>
[0031]
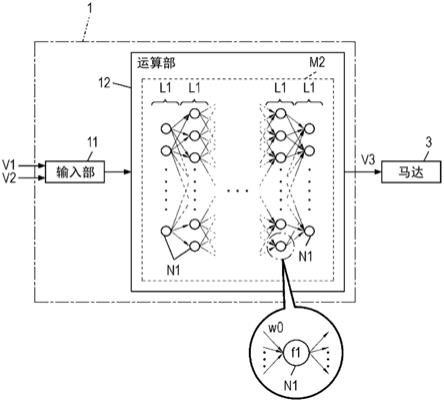
图1是表示发动机装置的整体构成的图。本构成例的发动机装置100具有发动机控制电路10、逆变器20(例如3相发动机驱动器ic(integrated circuit:集成电路))、及交流
发动机30(例如3相交流发动机)。
[0032]
发动机控制电路10从逆变器20的直流母线电流idc检测3相相电流iu、iv及iw,以矢量控制方式驱动交流发动机30。根据矢量控制方式,可从低速域到高速域高效率且顺利地控制交流发动机30的旋转。
[0033]
逆变器20包含连接于发动机控制电路10的3相半桥(=3相的上侧fet(field effect transistor:场效晶体管)及下侧fet),基于从发动机控制电路10输入的3相pwm信号(=施加于3相上侧fet各自的栅极的上侧pwm信号hu、hv及hw、以及施加于3相下侧fet各自的栅极的下侧pwm信号lu、lv、及lw)产生流向交流发动机30的3相驱动电流u、v及w(=各自的相位逐个错开120度的3相正弦波电流)。
[0034]
此外,在本图虽未明示,但逆变器20可以包含单一的分流电阻作为检测直流母线电流idc的机构。该分流电阻可连接于3相下侧fet各自的共通端与接地端之间,也可以连接于3相上侧fet各自的共通端与电源端之间。
[0035]
交流发动机30包含连接于逆变器20的3相发动机线圈,通过对每一个发动机线圈流通驱动电流u、v及w,而使转子旋转。此外,驱动电流u、v及w的频率越低,转子的旋转速度越低,驱动电流u、v及w的频率越高,转子的旋转速度越高。
[0036]
<发动机控制电路>
[0037]
接下来,一边参照图1,一边详细说明发动机控制电路10的构成及动作。本构成例的发动机控制电路10包含ad转换部11、克拉克[clarke]转换部12、帕克[park]转换部13、pi控制部14、反帕克转换部15、反克拉克转换部16、pwm信号产生部17、速度/轴误差推定部18、速度控制部19、及轴误差控制部1a。
[0038]
ad转换部11在从pwm信号产生部17指示的电流检测时点对模拟的直流母线电流idc进行取样,并转换为数字的第1电流值iu、iv及iw(=相当于3相相电流)。
[0039]
克拉克转换部12将3相第1电流值iu、iv及iw(其中,iu iv iw=0)转换为2相第2电流值iα(=iu)及iβ(=(iu 2
×
iv)/√3)。
[0040]
帕克转换部13将固定坐标系的第2电流值iα及iβ转换为旋转坐标系的第3电流值id(=iαcosθ iβsinθ)及iq(=-iαsinθ iβcosθ,其中θ是转子的旋转角)。
[0041]
pi控制部14通过并排实施比例控制(p[proportional])与积分控制(i[integral]),而导出用于将第3电流值id及iq分别修正为所期望的目标电流值idref及iqref的第1电压值vd及vq。
[0042]
反帕克转换部15将旋转坐标系的第1电压值vd及vq转换为固定坐标系的第2电压值vα(=vdcosθ-vqsinθ)及vβ(=vdsinθ vqcosθ,其中θ是转子的旋转角)。
[0043]
反克拉克转换部16将2相第2电压值vα及vβ转换为3相电压指令vu(=vβ)、vv(=(-vβ √3vα)/2)及vw(=(-vβ-√3vα)/2)。
[0044]
此外,所述ad转换部11、克拉克转换部12、帕克转换部13、pi控制部14、反帕克转换部15、以及反克拉克转换部16形成了电压指令产生部,所述电压指令产生部从逆变器20的直流母线电流idc检测相电流iu、iv及iw并以矢量控制方式产生3相电压指令vu、vv及vw。所述电压指令产生部可作为硬件安装,也可作为软件安装。
[0045]
pwm信号产生部17比较3相电压指令vu、vv及vw与特定频率f(=1/t)的三角波信号tri,根据其比较结果产生3相pwm信号(=上侧pwm信号hu、hv及hw与下侧pwm信号lu、lv及
lw)并输出到逆变器20。上侧pwm信号hu、hv及hw与下侧pwm信号lu、lv及lw基本上是彼此的逻辑电平经反转后的信号。
[0046]
此外,pwm信号产生部17基于3相电压指令vu、vv及vw决定3相pwm信号(hu、hv及hw、以及lu、lv及lw)各自的能率,产生逆变器20(上侧fet及下侧fet)的栅极驱动模式,且对ad转换部11指示电流检测时点。
[0047]
此外,pwm信号产生部17为了确保直流母线电流idc(进而3相相电流iu、iv及iw)的电流检测期间,而进行pwm信号的脉冲移位处理。具体来说,pwm信号产生部17在比较3相电压指令vu、vv及vw与三角波信号tri之前,对3相电压指令vu、vv及vw中的至少1个实施修正处理(=相当于pwm信号的能率加减算)。此外,对脉冲移位处理的详情(是否需要修正电压指令或修正量的设定等)稍后进行叙述。
[0048]
速度/轴误差推定部18基于克拉克转换部12的输出(=第2电流值iα及iβ)推定3相发动机30的旋转速度及轴误差。
[0049]
速度控制部19以3相发动机30的旋转速度与所期望的目标值一致的方式,设定pi控制部14的目标电流值idref及iqref。
[0050]
轴误差控制部1a以3相发动机30的轴误差变小的方式,对帕克转换部13设定位置推定値θc(相当于转子旋转角θ)。
[0051]
此外,所述速度/轴误差推定部18、速度控制部19、及轴误差控制部1a可作为硬件安装,也可通过利用cpu[central processing unit:中央处理器]执行适当的运算处理程序,而作为软件安装。
[0052]
<相电流检测处理>
[0053]
图2是表示相电流检测处理的一例的图,从上依序描绘电压指令vu、vv及vw(小虚线、大虚线、及一点划线)以及三角波信号tri(实线)、上侧pwm信号hu、hv及hw、下侧pwm信号lu、lv及lw、电压矢量vct(hu、hv、hw)、以及直流母线电流idc。
[0054]
此外,在以下说明中,关于3相相电流iu、iv及iw,将从逆变器20向交流发动机30的方向定义为正( ),将从交流发动机30向逆变器20的方向定义为负(
‑
)。
[0055]
三角波信号tri在时刻t1~t5中上升,另一方面在时刻t5~t9中下降,时刻t9之后重复同样的举动。也就是说,三角波信号tri将时刻t1~t9作为pwm周期t,在特定的pwm频率f(=1/t)中成为重复上升与下降的举动。
[0056]
在时刻t1~t2以及时刻t8~t9,分别为vu>vv>vw>tri。此时,hu=hv=hw=h(1)且lu=lv=lw=l(0)。因此,在逆变器20中,3相上侧fet全部接通,3相下侧fet全部断开。其结果,因iu=iv=iw=0,故idc=0。也就是说,vct(1,1,1)相当于不流通任一相电流的零矢量。
[0057]
在时刻t2~t3以及时刻t7~t8,分别为vu>vv>tri>vw。此时,hu=hv=lw=h(1)且lu=lv=hw=l(0)。因此,在逆变器20中,u相及v相上侧fet与w相下侧fet接通,u相及v相下侧fet与w相上侧fet断开。其结果,因在标注框x所示的路径在流通电流,故idc=-iw。也就是说,通过对vct(1,1,0)中的直流母线电流idc进行取样,可检测w相相电流-iw。
[0058]
在时刻t3~t4以及时刻t6~t7,分别为vu>tri>vv>vw。此时,hu=lv=lw=h(1)且lu=hv=hw=l(0)。因此,在逆变器20中,u相上侧fet与v相及w相下侧fet接通,u相下侧fet与v相及w相上侧fet断开。其结果,因在标注框x所示的路径中流通电流,故idc=iu。
也就是说,通过对vct(1,0,0)中的直流母线电流idc进行取样,可检测u相相电流iu。
[0059]
在时刻t4~t5以及时刻t5~t6,分别为tri>vu>vv>vw。此时,lu=lv=lw=h(1)且hu=hv=hw=l(0)。因此,在逆变器20中,3相上侧fet全部接通,3相下侧fet全部断开。其结果,因iu=iv=iw=0,故idc=0。也就是说,vct(0,0,0)相当于不流通任一相电流的零矢量。
[0060]
此外,本图中,列举了将电压指令值vu、vv及vw各自的大小关系唯一(vu>vv>vw)固定,随着三角波信号tri的时间变化,设定4个电压矢量vct((1,1,1)、(1,1,0)、(1,0,0)、(0,0,0))的例子,但根据电压指令值vu、vv及vw的大小关系,可进一步设定4个电压矢量vct((0,1,1)、(0,1,0)、(1,0,1)、(0,0,1)),也就是合计8个电压矢量vct。
[0061]
如之前所述,可在vct(1,1,0)检测相电流-iw,可在vct(1,0,0)检测相电流iu。另外,可在vct(0,1,1)检测相电流-iu,可在vct(0,1,0)检测相电流iv。同样地,可在vct(1,0,1)检测相电流-iv,可在vct(0,0,1)检测相电流iw。
[0062]
<脉冲移位处理(基本动作)>
[0063]
图3是表示pwm信号产生部17的脉冲移位处理的基本动作的图,从上依序描绘电压指令vu及vv(小虚线及大虚线)以及三角波信号tri(实线)、上侧pwm信号hu、以及上侧pwm信号hv。此外,本图中设为vu>vv(>vw)。
[0064]
另外,关于电压指令vu,细的小虚线表示未修正的指令值,粗的小虚线表示有修正的指令值(以下,称为有修正的电压指令vu')。进而,关于上侧pwm信号hu,小虚线表示未修正(未脉冲移位)的举动,实线表示有修正(有脉冲移位)的举动。
[0065]
现在,考虑对vct(1,0,0)(也就是说,vu>tri>vv(>vw))中的直流母线电流idc进行取样,检测u相相电流iu。
[0066]
本图中,因电压指令vu与电压指令vv的差量(=vu-vv)小于特定值vdiff,上侧pwm信号hu的脉冲边缘(时刻t13及t16)与上侧pwm信号hv的脉冲边缘(时刻t11及t17)接近,因此,不能确保所需的电流检测期间tdet。因此,受到直流母线电流idc所产生的铃流等影响,而难以高精度地检测相电流iu。
[0067]
因此,pwm信号产生部17具备通过修正电压指令vu,而进行上侧pwm信号hu的左移位(=使产生脉冲边缘的时点提前的方向的脉冲移位处理)的功能。
[0068]
如果按照本图进行叙述,那么在pwm周期t的前半(=时刻t14以前),对电压指令vu赋予负修正量(-δv),在pwm周期t的后半(=时刻t14以后),对电压指令vu赋予正修正量( δv)。也就是说,在pwm周期t的前半,vu'=vu-δv,在pwm周期t的后半,vu'=vu δv。此外,只要以满足δv≧vdiff-(vu-vv)的方式设定最大电压指令max的修正量δv即可。
[0069]
根据所述修正,在pwm周期t的后半,因有修正的电压指令vu'与电压指令vv的差量(=vu'-vv)成为特定值vdiff以上,并可拉离上侧pwm周期hu的脉冲边缘(时刻t15)与上侧pwm信号hv的脉冲边缘(时刻t17),因此,能够确保必要的电流检测期间tdet,进而能够高精度地检测相电流iu。
[0070]
另外,在pwm周期t的整个期间(=前半及后半的总和),因针对电压指令vu的总修正量成为零,所以不易对交流发动机30的旋转驱动造成影响。
[0071]
这样,为了确保电流检测期间tdet,pwm信号的脉冲移位处理非常有效。此外,关于pwm信号的脉冲移位处理,一直以来提出了各种方式。
[0072]
例如,可列举:(1)在整个周期只实施左移位的方式、(2)在整个周期只实施右移位(=延迟脉冲边缘的产生时点的方向的脉冲移位处理)的方式、(3)在每1周期交替切换实施右移位与左移位的方式、(4)在每1周期依序切换实施右移位/无移位/左移位的方式、或(5)在每1.5周期依序切换实施右移位(修正量1且修正期间0.5)与左移位(修正量0.5且修正期间0.5
×
2)的方式。
[0073]
以下,提出与所述任一方式都不同的新颖方式的脉冲移位处理。
[0074]
<脉冲移位处理(第1实施方式)>
[0075]
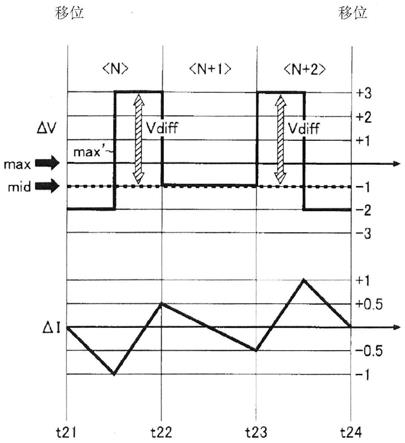
图4是表示pwm信号产生部17的脉冲移位处理的第1实施方式的图。在本图的上段,描绘了基于脉冲移位处理的最大电压指令max的修正量δv,在本图的下段,描绘了基于脉冲移位处理的直流母线电流idc的变化量δi。
[0076]
此外,在本图上段,最大电压指令max及中间电压指令mid分别是指已出现的电压指令vu、vv及vw中最大的电压指令及中间的电压指令。另外,实线表示有修正的最大电压指令max'(=max δv),虚线表示中间电压指令mid。
[0077]
在本图,列举相对于最大电压指令max与中间电压指令mid的差量(=max-mid)为“1”,确保电流检测期间tdet所需的差量(=vdiff)为“4”的情况进行说明。
[0078]
首先,在第n周期(=时刻t21~t22),进行上侧pwm信号hmax的左移位。如果按照本图进行叙述,那么在第n周期的前半,对最大电压指令max赋予负修正(δv=
‑
2),在第n周期的后半,对最大电压指令max赋予正修正(δv= 3)。
[0079]
也就是说,在第n周期的前半,max'=max-2。此时,直流母线电流idc的变化量δi根据最大电压指令max的修正量δv(=
‑
2)而沿负方向增大(0
→‑
1)。另一方面,在第n周期的后半,max'=max 3。此时,直流母线电流idc的变化量δi根据最大电压指令max的修正量δv(= 3)而沿正方向增大(
‑1→
0.5)。
[0080]
根据所述修正,在第n周期的后半,因有修正的最大电压指令max'与中间电压指令mid的差量(=max'-mid)成为特定值vdiff(=4)以上,因此,能够确保所需的电流检测期间tdet。
[0081]
接下来,在第(n 1)周期(=时刻t22~t23),进行差量零移位(=通过将最大电压指令max降低至中间电压指令mid,而使上侧pwm信号hamx及hmid各自的脉冲边缘一致的脉冲移位处理)。如果按照本图进行叙述,那么在第(n 1)周期,对最大电压指令max一律赋予负修正量(δv=
‑
1)。
[0082]
也就是说,在第(n 1)周期,max'=max-1(=mid)。此时,直流母线电流idc的变化量δi根据最大电压指令max的修正量δv(=-1)沿负方向增大( 0.5
→‑
0.5)。
[0083]
接下来,在第(n 2)周期(=时刻t23~t24),进行上侧pwm信号hmax的右移位。如果按照本图进行叙述,那么在第(n 2)周期的前半,对最大电压指令max一律赋予正修正量(δv= 3),在第(n 2)周期的后半,对最大电压指令max一律赋予负修正量(δv=
‑
2)。
[0084]
也就是说,在第(n 2)周期的前半,max'=max 3。此时,直流母线电流idc的变化量δi根据最大电压指令max的修正量δv(= 3)而沿正方向增大(
‑
0.5
→
1)。相对于此,在第(n 2)周期的后半,max'=max-2。此时,直流母线电流idc的变化量δi根据最大电压指令max的修正量δv(=
‑
2)而沿负方向增大( 1
→
0)。
[0085]
根据所述修正,在第(n 2)周期的后半,因有修正的最大电压指令max'与中间电压
指令mid的差量(=max'-mid)成为特定值vdiff(=4)以上,因此能够确保所需的电流检测期间tdet。
[0086]
这样,pwm信号产生部17以如下方式修正最大电压指令max,即,在连续的多个pwm周期(=第n~第(n 2)周期)中的第(n 1)周期(=相当于第1周期),使最大电压指令max与中间电压指令mid一致,在第n周期及第(n 2)周期(=相当于第2周期),将最大电压指令max与中间电压指令mid的差量设为特定值vdiff以上。
[0087]
另外,pwm信号产生部17以在多个pwm周期(第n~第(n 2)周期)的整个期间使总修正量σδv为零的方式,修正最大电压指令max。
[0088]
如果按照本图进行叙述,那么第n周期的总修正量σδv(n)是“ 1(=
‑
2 3)”,第(n 1)周期的总修正量σδv(n 1)是
“‑
2(=
‑
1-1)”,第(n 2)周期的总修正量σδv(n 2)是“ 1(= 3-2)”。其结果,在第n~第(n 2)周期的整个期间,总修正量σδv(=σδv(n) σδv(n 1) σδv(n 2))成为「0(= 1-2 1)」。
[0089]
根据这样的脉冲移位处理,可在每3个周期将总修正量σδv维持为零且确保所需的电流检测期间tdet。
[0090]
另外,特别在第(n 1)周期,放弃所述周期中的电流检测的机会,使最大电压指令max与中间电压指令mid一致。也就是说,在决定不进行电流检测的第(n 1)周期,从“无需对最大电压指令max与中间电压指令mid之间附加差”这种反向思考的情况来看,降低最大电压指令max,使得两者的差量(=max-mid)成为零。
[0091]
其结果,在第n周期及第(n 2)周期,因可以将电压指令max的提高量设定得较大来抵消第(n 1)周期中的最大电压指令max的降低量,所以能够确保电流检测期间tdet更长。
[0092]
此外,在不进行电流检测的第(n 1)周期,只要保持之前的第n周期获得的电流检测值,或从到此为止的电流检测值推定出相电流的大小即可。
[0093]
另外,在第n~第(n 2)周期,在每1周期必须实施脉冲移位处理(左移位或右移位、或者差量零移位),不存在未进行脉冲移位处理的pwm周期。因此,伴随脉冲移位处理的噪声重叠成分的频率不会下降至人类可听范围(一般来说是20hz~20khz),所以能够抑制可听噪音的产生。
[0094]
另外,pwm信号产生部17以如下方式修正最大电压指令max,即,在与第(n 1)周期的前后连续的第n周期及第(n 2)周期中的其中一个周期使上侧pwm信号hmax左移位,在另一个周期使pwm信号hmax右移位。
[0095]
根据这样的脉冲移位处理,第n~第(n 2)周期中的直流母线电流idc的变化量δi以在时间轴观察下具有对称性的方式变动。因此,可缓和相电流的应变,所以不易对交流发动机30的旋转驱动造成影响。
[0096]
另外,pwm信号产生部17以如下方式修正最大电压指令max,即,在第n周期及第(n 2)周期各自的前半及后半中的其中一半将最大电压指令max与中间电压指令mid的差量设为vdiff以上,在另一半使第n周期及第(n 2)周期各自的总修正量σδv(n)及σδv(n 2)接近零。
[0097]
例如,如果着眼于第n周期,那么在第n周期的后半,为了确保所期望的电流检测期间tdet而提高最大电压指令max,鉴于此在第n周期的前半,反而降低最大电压指令max。
[0098]
另外,例如如果着眼于第(n 2)周期,那么在第(n 2)周期的前半,为了确保所期望
的电流检测期间tdet而提高最大电压指令max,鉴于此在第(n 2)周期的后半,反而降低最大电压指令max。
[0099]
根据这样的脉冲移位处理,因第n周期及第(n 2)周期各周期中的直流母线电流idc的变化量δi在所述周期内接近零,所以不易对交流发动机30的旋转驱动造成影响。
[0100]
此外,在本实施方式的脉冲移位处理中,允许基于修正产生的最大电压指令max(或最小电压指令min)与中间电压指令mid的逆转(例如参照第n周期的前半、及第(n 2)周期的后半)。在此情况下,有相电流产生意外举动(最差的情况为相电流的逆转)而导致交流发动机30的驱动声音变大的危险。因此,以下提出不易产生所述不良的脉冲移位处理。
[0101]
<脉冲移位处理(第2实施方式)>
[0102]
图5是表示pwm信号产生部17的脉冲移位处理的第2实施方式的图。与已有的图4相同,在本图的上段,描绘了基于脉冲移位处理的最大电压指令max的修正量δv,在本图的下段,描绘了基于脉冲移位处理的直流母线电流idc的变化量δi。
[0103]
此外,在本图中,与上文的第1实施方式(图4)相同,列举相对于最大电压指令max与中间电压指令mid的差量(=max-mid)为“1”,确保电流检测期间tdet所需的差量(=vdiff)为“4”的情况进行说明。
[0104]
但,与上文的第1实施方式(图4)不同,pwm信号产生部17不允许基于修正产生的最大电压指令max与中间电压指令mid的逆转。换句话说,最大电压指令max的修正量δv被限制为δv≧
‑
1。
[0105]
根据这样的脉冲移位处理,因相电流不会产生意外举动,所以能够抑制交流发动机30的驱动声音增大。
[0106]
首先,在第n周期(=时刻t31~t32),进行上侧pwm信号hmax的左移位。如果按照本图进行叙述,那么在第n周期的前半,对最大电压指令max赋予负修正量(δv=
‑
1),在第n周期的后半,对最大电压指令max赋予正修正量(δv= 3)。
[0107]
也就是说,在第n周期的前半,max'=max-1(=mid)。此时,直流母线电流idc的变化量δi根据最大电压指令max的修正量δv(=
‑
1)而向负方向增大(0
→‑
0.5)。另一方面,在第n周期的后半,max'=max 3。此时,直流母线电压idc的变化量δi根据最大电压指令max的修正量δv(= 3)而向正方向增大(
‑
0.5
→
1)。
[0108]
根据所述修正,在第n周期的后半,因有修正的最大电压指令max'与中间电压指令mid的差量(=max'-mid)成为特定值vdiff(=4)以上,所以能够确保所需的电流检测期间tdet。就该点来说,与上文的第1实施方式(图4)无任何改变。
[0109]
接下来,在第(n 1)周期(=时刻t32~t33),进行差量零移位。如果按照本图进行叙述,那么在第(n 1)周期,对最大电压指令max一律赋予负偏移(δv=
‑
1)。
[0110]
也就是说,在第(n 1)周期,max'=max-1(=mid)。此时,直流母线电流idc的变化量δi根据最大电压指令max的修正量δv(=
‑
1)而向负方向增大( 1
→
0)。
[0111]
接下来,在第(n 2)周期(=时刻t33~t34),跳过脉冲移位处理(无移位)。此时,直流母线电流idc的变化量δi也成为零。
[0112]
此外,跳过脉冲移位处理的理由之一是,在之前的第n周期及第(n 1)周期中,双方的总修正量σδv(=σδv(n) σδv(n 1))已成为零,所以在第(n 2)周期无需进一步进行修正。如果按照本图进行叙述,那么第n周期的总修正量σδv(n)是“ 2(=
‑
1 3)”,第(n
1)周期的总修正量σδv(n 1)是
“‑
2(=
‑
1-1)”,所以双方的总修正量σδv成为“0(= 2-2)”。因此,在第(n 2)周期中,跳过脉冲偏移处理。
[0113]
另外,跳过脉冲偏移处理的另一个理由是,只在第(n 2)周期中,将最大电压指令max与中间电压指令mid的差量设为特定值vdiff以上,且无法将总修正量σδv(n 2)设为零。例如,在第2(n 2)周期的前半对最大电压指令max赋予了所需的修正量(δv= 3)的情况下,即便在第2周期(n 2)的后半最大限度赋予负修正量(δv=
‑
1),总修正量σδv(n 2)也会成为“ 2(= 3-1)”。为了避免这种情况,在第(n 2)周期,跳过脉冲移位处理。
[0114]
这样,在不允许基于修正产生的最大电压指令max与中间电压指令mid的逆转的脉冲移位处理中,应该留意的是,不仅在进行差量零移位的第(n 1)周期会失去电流检测的机会,在第(n 2)周期也会失去电流检测的机会。
[0115]
<脉冲移位处理(第3实施方式)>
[0116]
图6是表示pwm信号产生部17的脉冲移位处理的第3实施方式的图。与上文的图4及图5相同,在本图的上段,描绘了基于脉冲移位处理的最大电压指令max的修正量δv,在本图的下段,描绘了基于脉冲移位处理的直流母线电流idc的变化量δi。
[0117]
此外,本图中,与上文的第2实施方式(图5)不同,列举最大电压指令max与中间电压指令mid的差量(=max-mid)为“1.5”的情况为例进行说明。另外,在本实施方式也不允许基于修正产生的最大电压指令max与中间电压指令mid的逆转。也就是说,最大电压指令max的修正量δv被限制为δv≧
‑
1.5。
[0118]
首先,在第n周期(=时刻t41~t42),进行上侧pwm信号hmax的左移位。如果按照本图进行叙述,那么在第n周期的前半,对最大电压指令max赋予负修正量(δv=
‑
1),在第n周期的后半,对最大电压指令max赋予正修正量(δv= 2.5)。
[0119]
也就是说,在第n周期的前半,max'=max-1。此时,直流母线电流idc的变化量δi根据最大电压指令max的修正量δv(=
‑
1)而向负方向增大(0
→‑
0.5)。另一方面,在第n周期的后半,max'=max 2.5。此时,直流母线电压idc的变化量δi根据最大电压指令max的修正量δv(= 2.5)而向正方向增大(
‑
0.5
→
0.75)。
[0120]
根据所述修正,在第n周期的后半,因有修正的最大电压指令max'与中间电压指令mid的差量(=max'-mid)成为特定值vdiff(=4)以上,所以能够确保所需的电流检测期间tdet。
[0121]
接下来,在第(n 1)周期(=时刻t42~t43),进行差量零移位。如果按照本图叙述,那么在第(n 1)周期,对最大电压指令max一律赋予负偏移(δv=
‑
1.5)。
[0122]
也就是说,在第(n 1)周期,max'=max-1.5(=mid)。此时,直流母线电流idc的变化量δi根据最大电压指令max的修正量δv(=
‑
1.5)而向负方向增大( 0.75
→‑
0.75)。
[0123]
接着,在第(n 2)周期(=时刻t43~t44),进行上侧pwm信号hmax的右移位。如果按照本图进行叙述,那么在第(n 2)周期的前半,对最大电压指令max赋予正修正量(δv= 2.5),在第(n 2)周期的后半,对最大电压指令max赋予负修正量(δv=
‑
1)。
[0124]
也就是说,在第(n 2)周期的前半,max'=max 2.5。此时,直流母线电流idc的变化量δi根据最大电压指令max的修正量δv(= 2.5)而向正方向增大(
‑
0.75
→
0.5)。相对于此,在第(n 2)周期的后半,max'=max-1。此时,直流母线电压idc的变化量δi根据最大电压指令max的修正量δv(=
‑
1)而向负方向增大( 0.5
→
0)。
[0125]
根据所述修正,在第(n 2)周期的前半,因有修正的最大电压指令max'与中间电压指令mid的差量(=max'-mid)成为特定值vdiff(=4)以上,所以能够确保所需的电流检测期间tdet。
[0126]
这样,在最大电压指令max与中间电压指令mid的差量(=max-mid)某种程度上较大的情况下,更详细叙述,如果满足max-mid≧vdiff/3,那么即便为不允许基于修正产生的最大电压指令max与中间电压指令mid的逆转的构成,也可以不跳过脉冲移位处理。
[0127]
<脉冲移位处理(第4实施方式)>
[0128]
图7是表示pwm信号产生部17的脉冲移位处理的第4实施方式的图。与上文的图4~图6相同,在本图的上段,描绘了基于脉冲移位处理的最大电压指令max的修正量δv,在本图的下段,描绘了基于脉冲移位处理的直流母线电流idc的变化量δi。
[0129]
此外,在本图中,与上文的第2实施方式(图5)及第3实施方式(图6)不同,列举最大电压指令max与中间电压指令mid的差量(=max-mid)为“2”的情况为例进行说明。另外,本实施方式中也不允许基于修正产生的最大电压指令max与中间电压指令mid的逆转。也就是说,最大电压指令max的修正量δv被限制为δv≧
‑
2。
[0130]
首先,在第n周期(=时刻t51~t52),进行上侧pwm信号hmax的左移位。如果按照本图进行叙述,那么在第n周期的前半,最大电压指令max未修正(δv=0),在第n周期的后半,对最大电压指令max赋予正修正量(δv= 2)。
[0131]
也就是说,在第n周期的前半,max'=max。此时,直流母线电流idc的变化量δi成为零。相对于此,在第n周期的后半,max'=max 2。此时,直流母线电压idc的变化量δi根据最大电压指令max的修正量δv(= 2)而向正方向增大(0
→
1)。
[0132]
根据所述修正,在第n周期的后半,因有修正的最大电压指令max'与中间电压指令mid的差量(=max'-mid)成为特定值vdiff(=4)以上,所以能够确保所需的电流检测期间tdet。
[0133]
接下来,在第(n 1)周期(=时刻t52~t53),进行差量零移位。如果按照本图叙述,那么在第(n 1)周期,对最大电压指令max一律赋予负偏移(δv=
‑
2)。
[0134]
也就是说,在第(n 1)周期,max'=max-2(=mid)。此时,直流母线电流idc的变化量δi根据最大电压指令max的修正量δv(=
‑
2)而向负方向增大( 1
→‑
1)。
[0135]
接下来,在第(n 2)周期(=时刻t53~t54),进行上侧pwm信号hmax的右移位。如果按照本图进行叙述,那么在第(n 2)周期的前半,对最大电压指令max赋予正修正量(δv= 2)。在第(n 2)周期的后半,最大电压指令max未修正(δv=0)。
[0136]
也就是说,在第(n 2)周期的前半,max'=max 2。此时,直流母线电流idc的变化量δi根据最大电压指令max的修正量δv(= 2)而向正方向增大(
‑1→
0)。相对于此,在第(n 2)周期的后半,max'=max。此时,直流母线电压idc的变化量δi成为零。
[0137]
根据所述修正,在第(n 2)周期的前半,因有修正的最大电压指令max'与中间电压指令mid的差量(=max'-mid)成为特定值vdiff(=4)以上,所以能够确保所需的电流检测期间tdet。
[0138]
这样,在最大电压指令max与中间电压指令mid的差量(=max-mid)更大的情况下,更具体叙述,在满足max-mid≧vdiff/2的情况下,第n周期的前半及第(n 2)周期的后半中,无需对最大电压指令max进行修正。换句话说,只利用第(n 1)周期中的负修正量(δv
=
‑
2)便能够抵消第n周期及第(n 2)周期中的正修正量(δv= 2)。
[0139]
<脉冲移位处理(第5实施方式)>
[0140]
图8是表示pwm信号产生部17的脉冲移位处理的第5实施方式的图,从上依序描绘最大电压指令max及中间电压指令mid(小虚线及大虚线)以及三角波信号tri(实线)、上侧pwm信号hmax及hmid。
[0141]
另外,关于最大电压指令max,细的小虚线表示无修正的指令值,粗的小虚线表示有修正的指令值(以下,称为有修正的电压指令max')。进一步来说,关于上侧pwm信号hmax,小虚线表示无修正(无脉冲移位)的举动,实线表示有修正(有脉冲移位)的举动。
[0142]
在上文的第1~第4实施方式(图4~图7),为了简单说明,而将最大电压指令max与中间电压指令mid的差量(=max-mid)设为固定值,但在本实施方式,对所述差量随时间经过而变动时的举动进行说明。另外,在本实施方式也不允许基于修正产生的最大电压指令max与中间电压指令mid的逆转。
[0143]
在第(n-2)周期(=时刻t61~t62)、及第(n-1)周期(=时刻t62~t63)的各周期中,最大电压指令max与最小电压指令min的差量(=max-min)为特定值vdiff以上,确保了所需的电流检测期间tdet。因此,pwm信号产生部17判断为无需脉冲移位处理,不修正最大电压指令max。
[0144]
在第n周期(=时刻t63~t64),最大电压指令max与中间电压指令mid的差量(=max-mid)小于特定值vdiff,这样的话不能确保所需的电流检测期间tdet。因此,pwm信号产生部17通过修正最大电压指令max,而进行上侧pwm信号hmax的左移位。如果按照本图具体叙述,那么在第n周期的前半,对最大电压指令max赋予负修正量,在第n周期的后半,对最大电压指令max赋予正修正量。此处,将第n周期的总修正量设为零(与上文的图3同样)。
[0145]
根据所述修正,在第n周期的后半,因有修正的最大电压指令max'与中间电压指令mid的差量(=max'-mid)成为特定值vdiff以上,所以能够确保所需的电流检测期间tdet。
[0146]
在第(n 1)周期(=时刻t64~t65),最大电压指令max与中间电压指令mid的差量(=max-mid)进一步变小,更难确保电流检测期间tdet。因此,pwm信号产生部17放弃电流检测的机会,进行差量零移位。如果按照本图进行叙述,那么在第(n 1)周期,对最大电压指令max一律赋予负偏移,使得有修正的最大电压指令max'与中间电压指令mid一致。
[0147]
在第(n 2)周期(=时刻t65~t66),进行上侧pwm信号hmax的右移位,以抵消第(n 1)周期中的最大电压指令max的降低量。如果按照本图进行叙述,那么在第(n 2)周期的前半,对最大电压指令max赋予正修正量,使得有修正的最大电压指令max'与中间电压指令mid的差量成为特定值vdiff以上。另一方面,在第(n 2)周期的后半,不修正最大电压指令max。
[0148]
根据所述修正,在第(n 2)周期的前半,因有修正的最大电压指令max'与中间电压指令mid的差量(=max'-mid)成为特定值vdiff(=4)以上,所以能够确保所需的电流检测期间tdet。
[0149]
此外,在只利用第(n 2)周期无法抵消第(n 1)周期中的最大电压指令max的降低量的情况下(例如,有修正的最大电压指令max'已到达设定上限值的情况),也可以利用第(n 3)周期(=时刻t66~t67)中的修正使它们达到平衡。
[0150]
此外,也可事先预测在第(n 1)周期进行差量零移位,增大第n周期的左移位(与上
文的图5~图7同样)。
[0151]
这样,关于是否在某pwm周期进行脉冲移位处理,以及脉冲移位处理的最大电压指令max的修正量,只要事先根据在此之前的pwm周期中的最大电压指令max及中间电压指令mid预测即可。
[0152]
<其他变化例>
[0153]
此外,本说明书中公开的各种技术特征除所述实施方式以外,也可在不脱离其技术创作的主旨的范围内施加各种变更。
[0154]
例如,在所述实施方式,均着眼于最大电压指令max与中间电压指令mid进行了说明,但例如在着眼于中间电压指令mid与最小电压指令min(=是指已出现的电压指令vu、vv及vw中最小的电压指令)的情况下,只要将所述最大电压指令max替换为最小电压指令min进行理解即可。
[0155]
这样,应该认为所述实施方式的所有方面均为例示而并非限制者,应该理解本发明的技术范围并不限定于所述实施方式,而包含与权利要求的范围均等的意思及属于范围内的全部变更。
[0156]
[产业上的可利用性]
[0157]
本说明书中公开的发动机控制电路可适合用作各种应用中所使用的交流发动机的控制机构。
[0158]
[符号的说明]
[0159]
10 发动机控制电路
[0160]
11 ad转换部
[0161]
12 克拉克转换部
[0162]
13 帕克转换部
[0163]
14 pi控制部
[0164]
15 反帕克转换部
[0165]
16 反克拉克转换部
[0166]
17 pwm信号产生部
[0167]
18 速度/轴误差推定部
[0168]
19 速度控制部
[0169]
1a 轴误差控制部
[0170]
20 逆变器
[0171]
30 交流发动机。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。