1.本发明涉及农业种植领域,尤其涉及一种播种深度检测装置及检测方法。
背景技术:
2.目前播种深度监测技术主要有三种方案,一是通过仿形机构进行播种深度的监测,该种监测机械结构复杂,测量精度差;二是通过超声波传感器进行直接测量地面,进而计算出播种深度,该种监测方案由于超声波传感器在复杂的播种环境中存在回波误差,会导致播种深度监测的不准确;三是通过角度传感器测量播种机在播种过程中摆动的角度,进而换算成播种深度,但由于在播种过程中振动较大,会导致播种深度不准确。
3.因此,本发明提供一种能够精确测量播种深度的播种深度检测装置及检测方法。
技术实现要素:
4.本发明的目的在于提供一种能够精确测量播种深度的播种深度检测装置及检测方法。
5.本发明采用以下技术方案实现:一种播种深度检测装置,其安装在一种播种设备上。播种设备包括支架、镇压轮、耕刀和种箱。镇压轮转动轴的两端转动安装在支架的一端上。耕刀安装在支架上,用于在地面上耕出用于播种的沟槽。种箱内收容有种子,种箱安装在支架的另一端上,且设置有用于向沟槽播下种子的出种通道。
6.播种深度检测装置包括:角度传感器、激光传感器和数据处理器。角度传感器安装在支架上,用于实时测量播种设备在播种过程中支架的摆动角度。激光传感器安装在出种通道的外壁上,用于实时测量播种设备在播种过程中激光传感器与沟槽之间的距离。
7.数据处理器用于:
8.i实时根据摆动角度计算沟槽的播种深度一a1,还实时根据激光传感器测得的距离计算沟槽的播种深度二a2;
9.ii对播种深度一a1与一个预设的目标播种深度作差,得到差值w1。对播种深度二a2与一个预设的目标播种深度作差,得到差值w2。根据播种深度一a1、播种深度二a2、w1以及w2分别赋予角度传感器(5)的数据融合权重k1和激光传感器(7)的数据融合权重k2;其中,k1=w23/(w13 w23),k2=w13/(w13 w23)。
10.iii根据k1和k2对a1和a2进行实时融合,得到播种深度三a3:a3=a1
×
k1 a2
×
k2;播种深度三a3为播种深度检测装置的输出值。
11.作为上述方案的进一步改进,所述数据处理器还用于:
12.iv实时判断播种深度三a3是否在一个预设的播种深度范围内。
13.v当播种深度三a3不在预设的播种深度范围内时,驱动耕刀调节沟槽的播种深度,使播种深度三a3回到预设的播种深度范围内。
14.作为上述方案的进一步改进,所述数据处理器还用于:
15.当播种深度三a3小于预设的播种深度范围时,驱动耕刀对沟槽进行耕深操作,使
播种深度三a3回到预设的播种深度范围内。
16.当播种深度三a3大于预设的播种深度范围时,驱动耕刀对沟槽进行覆土操作,使播种深度三a3回到预设的播种深度范围内。
17.作为上述方案的进一步改进,播种深度检测装置还包括:
18.用于报警的报警器。
19.数据处理器还用于当播种深度三a3不在预设的播种深度范围内时,驱动报警器报警。
20.作为上述方案的进一步改进,播种深度检测装置还包括显示器。显示器用于显示播种深度三a3、摆动角度、距离以及摆动角度和距离数据波形。
21.作为上述方案的进一步改进,播种深度检测装置还包括安装架和弹簧套筒一。
22.安装架两端转动连接在支架上,种箱通过固定在安装架的一端上而安装在支架上。
23.弹簧套筒一固定在支架与安装架的另一端之间,且在播种设备发生颠簸时,通过发生弹性形变实现对支架的抖动缓冲。
24.作为上述方案的进一步改进,所述播种深度检测装置还包括安装机构。安装机构包括地轮、仿地形板、弹簧套筒二、安装座;地轮安装在安装座上,仿地形板固定在出种通道的外壁上,弹簧套筒二的一端支撑仿地形板,另一端固定在安装座上,且弹簧套筒二通过弹性形变使地轮在所述播种设备的播种过程中始终接触地面;激光传感器安装在安装座上。
25.本发明还提供了一种播种设备,其包括支架、镇压轮、耕刀、种箱和播种深度检测装置。镇压轮转动轴的两端转动安装在支架的一端上。耕刀安装在支架上,用于在地面上耕出用于播种的沟槽。种箱内收容有种子,种箱安装在支架的另一端上,且设置有用于向所述沟槽播下种子的出种通道。播种深度检测装置用于检测所述沟槽的播种深度。
26.作为上述方案的进一步改进,所述播种设备还包括播种机、连杆机构、液压缸和伺服阀。
27.播种机用于驱动所述耕刀;
28.连杆机构用于驱动所述播种机;
29.液压缸用于驱动所述连杆机构;
30.伺服阀用于驱动所述液压缸。所述数据处理器根据播种深度三a3驱动所述伺服阀的阀芯的动作幅度。
31.本发明还提供了一种播种深度检测方法,采用所述的播种深度检测装置;所述播种深度检测方法包括以下步骤:
32.实时测量播种设备在播种过程中支架的摆动角度。
33.实时测量播种设备在播种过程中激光传感器与沟槽之间的距离;
34.实时根据摆动角度计算所述沟槽的播种深度一a1,还实时根据距离计算沟槽的播种深度二a2。
35.对所述播种深度一a1与一个预设的目标播种深度作差,得到差值w1;对播种深度二a2与一个预设的目标播种深度作差,得到差值w2;并根据播种深度一a1、播种深度二a2、w1以及w2分别赋予角度传感器(5)的数据融合权重k1和激光传感器(7)的数据融合权重k2;其中,k1=w23/(w13 w23),k2=w13/(w13 w23)。
36.根据k1和k2对a1和a2进行实时融合,得到播种深度三a3:a3=a1
×
k1 a2
×
k2;播种深度三a3为播种深度检测装置的输出值。
37.与现有技术相比,本发明将通过双传感器进行深度检测,采用卡尔曼滤波算法和卡尔曼数据融合算法对采集的数据进行滤波处理和数据融合处理,使得测量的数据更加精确,可以消除因某些外界因素造成的误差,避免影响测量结果的准确性。
38.通过设置显示实时的播种深度数据的显示屏和报警系统,可以防止播种深度偏离设定值而无法及时发现进行调整,避免造成农作物发芽率降低进而造成粮食产量的下降。
39.通过主控板系统控制播种深度调节系统工作,可以实现在播种过程中实时调节播种深度在合适的范围内,既保证了播种的质量有节约了人工调节播种深度的时间,提高了播种效率。
附图说明
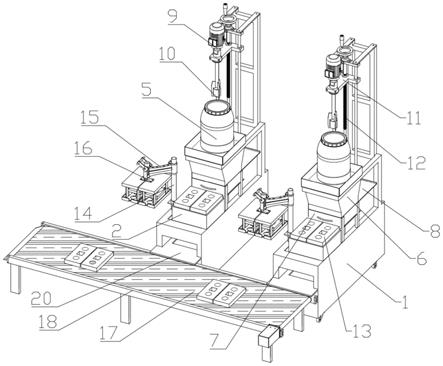
40.图1为本发明播种设备的结构示意图。
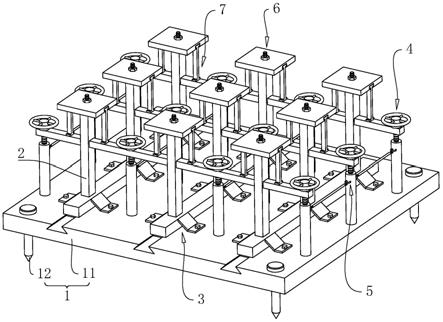
41.图2为图1的主视图。
42.图3为本发明播种设备中耕刀调节的流程图。
43.图4为本发明实施例中播种设备的模块图。
44.图5为本发明播种深度检测方法的流程示意图。
45.图中:1
‑
种箱;2
‑
弹簧套筒一;3
‑
支架;4
‑
镇压轮;5
‑
角度传感器;6
‑
出种通道;7
‑
激光传感器;8
‑
仿地形版;9
‑
弹簧套筒二;10
‑
地轮;11
‑
安装架;12
‑
安装机构。
具体实施方式
46.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
47.实施例1
48.请参阅图1和图2,本实施例公开了一种播种设备,包括种箱1、支架3、镇压轮4、耕刀和播种深度检测装置。耕刀安装在支架3上,在播种过程中,耕刀可以在地面上耕出用于播种的沟槽。种箱1内可容纳待播种的农业种子,种箱1安装在支架3的一端上,且设置有用于向所述沟槽播下种子的出种通道6,在播种过程中,种子在种箱1内通过播种通道6落下。镇压轮4的转动轴的两端转动安装在支架3的一端上。
49.请结合图3,本实施例中,所述播种设备还可以包括播种机、连杆机构、液压缸和伺服阀。伺服阀可根据播种设备的信号驱动液压缸。液压缸用于驱动连杆机构。连杆机构用于驱动播种机。所述播种机用于驱动耕刀,可改变耕刀的高度,进而改变耕刀耕出的沟槽的深度。
50.播种深度检测装置包括角度传感器5、激光传感器7和数据处理器。本实施例中,所述数据处理器包括主控芯片为stm32f407vet6的核心板。激光传感器7为tof10120激光传感器。为了提高准确性,本实施例中,角度传感器5和激光传感器7均通过采用can通信与数据处理器进行数据的传输。
51.角度传感器5安装在支架3上,用于实时测量播种设备在播种过程中支架3的摆动
角度。当然,为了提高角度传感器5采集的数据更加精准,在本实施例中,所述播种深度检测装置还可以包括安装架11和弹簧套筒一2。安装架11两端转动连接在支架3上,种箱1通过固定在安装架11的一端上而安装在支架3上。弹簧套筒一2固定在支架3与安装架11的另一端之间,且在所述播种设备发生颠簸时,通过发生弹性形变实现对支架3的抖动缓冲,避免支架3仅在自重状态下由于一些碎土导致摆动不准确,增加了支架3摆动的准确和真实性。
52.激光传感器7安装在出种通道6的外壁上,用于实时测量播种设备在播种过程中激光传感器7与沟槽之间的距离。当然,为了提高角激光传感器7采集的数据更加精准,在本实施例中,播种深度检测装置还可以包括安装机构,安装机构包括地轮10、仿地形板8、弹簧套筒二9、安装座12;地轮10安装在安装座12上,仿地形板8固定在出种通道6的外壁上,弹簧套筒二9的一端支撑仿地形板8,另一端固定在安装座12上,且弹簧套筒二9通过弹性形变使地轮10在播种设备的播种过程中始终接触地面;激光传感器7安装在安装座12上,用于实时测量与仿地形板8之间的距离,通过距离反应播种深度二a2。激光传感器7不直接测量地面的高度,防止地面会有许多的干扰因素,如秸秆的覆盖、地面的碎土等影响,避免因外界干扰因素的存在导致测量的结果不准确。
53.所述数据处理器用于:
54.i实时根据摆动角度计算沟槽的播种深度一a1,还实时根据距离计算沟槽的播种深度二a2。在本实施例中,可以依据角度传感器(5)的测量方程实时计算出所述摆动角度对应的位移变化,得到播种深度一a1。也可以通过查表得方式进行转换,还可以根据实验得出的公式进行转换。本实施例中,激光传感器7测得的距离转换播种深度可以通过查表得方式进行转换,也可以根据实验得出的公式进行转换。当然,为了提高数据的准确性,本实施例中,所述数据处理器还通过卡尔曼滤波算法对所述摆动角度和所述距离进行滤波处理,滤除在测量过程中因外界因素影响导致的偏差较大的数据。将滤波处理后的两组实时数据计算得到所述沟槽的播种深度一a1和所述沟槽的播种深度二a2相对应。
55.ii对播种深度一a1与一个预设的目标播种深度作差,得到差值w1。对所述播种深度二a2与一个预设的目标播种深度作差,得到差值w2。并根据所述播种深度一a1、所述播种深度二a2、所述w1以及所述w2分别赋予所述角度传感器(5)的数据融合权重k1和所述激光传感器(7)的数据融合权重k2。其中,k1=w23/(w13 w23),k2=w13/(w13 w23)。本实施例中,一个预设的目标播种深度可以根据经验进行取值,也可以根据不同种子的适宜播种深度进行确定。
56.iii根据k1和k2对a1和a2通过卡尔曼滤波融合算法进行实时融合,得到播种深度三a3:a3=a1
×
k1 a2
×
k2;所述播种深度三a3为所述播种深度检测装置的输出值。
57.当然,在本实施例中,所述数据处理器还可以用于:
58.iv实时判断所述播种深度三a3是否在一个预设的播种深度范围内。
59.v当所述播种深度三a3不在所述预设的播种深度范围内时,驱动所述耕刀调节所述沟槽的播种深度,使播种深度三a3回到预设的播种深度范围内。
60.当所述播种深度三a3小于所述预设的播种深度范围时,驱动所述耕刀对所述沟槽进行耕深操作。使所述播种深度三a3回到所述预设的播种深度范围内,可以实现在播种过程中实现播种深度的实时调控。
61.当所述播种深度三a3大于所述预设的播种深度范围时,驱动所述耕刀对所述沟槽
进行覆土操作。使所述播种深度三a3回到所述预设的播种深度范围内,可以实现在播种过程中实现播种深度的实时调控。
62.通过将角度传感器和激光传感器采集到的数据先通过卡尔曼滤波算法进行滤波处理,滤除在测量过程中因外界因素影响导致的偏差较大的数据,然后在将滤波处理后的播种深度数据通过卡尔曼滤波融合算法进行融合,得到较为精确的播种深度数据,提高了播种深度检测的精度。
63.当然,在本实施例中,所述播种深度检测装置还包括报警器和显示器。当所述播种深度三a3不在所述预设的播种深度范围内时,通过数据处理器驱动所述报警器报警,提醒作业者播种深度偏离了设定的播种深度范围。
64.所述显示器可以显示所述播种深度三a3、所述摆动角度、所述距离以及所述摆动角度和所述距离数据波形。所述显示器的类型不加以限制,可以为串口屏。
65.请参阅图4,为本实施例的其中一种实现方式的模块图。
66.本发明将通过双传感器进行深度检测,采用卡尔曼滤波算法和卡尔曼数据融合算法对采集的数据进行滤波处理和数据融合处理,使得测量的数据更加精确,可以消除因某些外界因素造成的误差,避免影响测量结果的准确性。
67.通过设置显示实时的播种深度数据的串口屏和报警系统,可以防止播种深度偏离设定值而无法及时发现进行调整,避免造成农作物发芽率降低进而造成粮食产量的下降。
68.通过主控板系统控制播种深度调节系统工作,可以实现在播种过程中实时调节播种深度在合适的范围内,既保证了播种的质量有节约了人工调节播种深度的时间,提高了播种效率。
69.实施例2
70.本实施例公开了一种播种深度检测方法,其采用实施例1所述的播种深度检测装置。请结合图5,所述播种深度检测方法包括以下步骤:
71.实时测量所述播种设备在播种过程中支架3的摆动角度;
72.实时测量所述播种设备在播种过程中激光传感器7与所述沟槽之间的距离;
73.实时根据所述摆动角度计算所述沟槽的播种深度一a1,还实时根据所述距离计算所述沟槽的播种深度二a2;
74.对所述播种深度一a1与一个预设的目标播种深度作差,得到差值w1;对所述播种深度二a2与一个预设的目标播种深度作差,得到差值w2;并根据所述播种深度一a1、所述播种深度二a2、所述w1以及所述w2分别赋予所述角度传感器(5)的数据融合权重k1和所述激光传感器(7)的数据融合权重k2;其中,k1=w23/(w13 w23),k2=w13/(w13 w23)。
75.根据k1和k2对a1和a2进行实时融合,得到播种深度三a3:a3=a1
×
k1 a2
×
k2;所述播种深度三a3为所述播种深度检测装置的输出值。
76.本实施例的播种深度检测方法具有实施例1中的的播种深度检测装置的相同有益效果。
77.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。