技术特征:
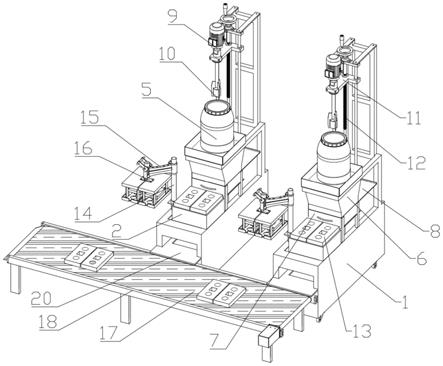
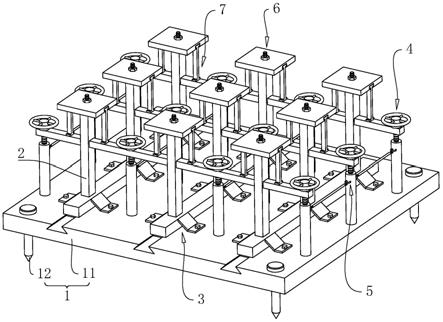
1.一种工厂化水产养殖无轨道式智能导航投饲机,其特征在于:包括agv车身(1),所述agv车身(1)的底部且靠近四个边角的位置均设有l形安装板(2),每个所述l形安装板(2)竖直板的内侧均设有驱动电机(3),所述驱动电机(3)输出轴的端部穿过l形安装板(2)的内侧且连接有动力轮(4),所述agv车身(1)的底部且位于左端中部的位置设有雷达(5),所述agv车身(1)的顶部且靠近左端中部的位置设有深度相机(6),所述agv车身(1)的顶部且靠近右下角的位置设有u形支撑板(9),所述u形支撑板(9)的顶部且靠近左上角的位置设有储气罐(14),所述agv车身(1)的顶部且靠近后侧中部的位置设有空气压缩机(13),所述空气压缩机(13)通过导管与储气罐(14)连接,所述储气罐(14)通过导管连接有电磁阀(15),所述电磁阀(15)通过导管连接有连接管(16),所述连接管(16)远离电磁阀(15)的一端连接有饲料管(8),所述饲料管(8)远离连接管(16)的一端连接有喷射管(17),所述agv车身(1)顶部的上方设有外壳(18),所述外壳(18)的顶部且靠近右下角的位置设有储料筒(7),所述储料筒(7)的底端穿过外壳(18)的顶部且连接有出料管(71),所述出料管(71)的底端穿过饲料管(8)外壁的顶部至所述饲料管(8)的内部,所述出料管(71)的外壁且位于后侧底部的位置设有对称分布的固定凸块(710),所述出料管(71)的底端活动连接有挡板(20),所述挡板(20)的外壁设有连接块(200),所述连接块(200)的顶部设有限位块(2000),所述限位块(2000)转动连接于两个所述固定凸块(710)之间。2.根据权利要求1所述的工厂化水产养殖无轨道式智能导航投饲机,其特征在于:所述动力轮(4)采用麦克纳姆轮。3.根据权利要求1所述的工厂化水产养殖无轨道式智能导航投饲机,其特征在于:所述agv车身(1)的顶部且靠近左端的位置设有电机驱动板(10)、上位机主控板(11)和下位机控制板(12)。4.根据权利要求3所述的工厂化水产养殖无轨道式智能导航投饲机,其特征在于:所述上位机主控板(11)采用ubuntu系统。5.根据权利要求1所述的工厂化水产养殖无轨道式智能导航投饲机,其特征在于:所述饲料管(8)呈倾斜设置,所述饲料管(8)的前端高于后端。6.根据权利要求1所述的工厂化水产养殖无轨道式智能导航投饲机,其特征在于:所述u形支撑板(9)的顶部且位于电磁阀(15)正下方的位置设有第一支撑座(90),所述电磁阀(15)固定在第一支撑座(90)的顶部。7.根据权利要求1所述的工厂化水产养殖无轨道式智能导航投饲机,其特征在于:所述u形支撑板(9)的顶部且位于饲料管(8)外壁中部正下方的位置设有第二支撑座(91),所述饲料管(8)固定在第二支撑座(91)的顶部。8.根据权利要求1所述的工厂化水产养殖无轨道式智能导航投饲机,其特征在于:所述储料筒(7)的顶部铰接有翻盖(70)。9.根据权利要求1所述的工厂化水产养殖无轨道式智能导航投饲机,其特征在于:当所述挡板(20)向下倾斜打开时,所述限位块(2000)前侧的顶部与出料管(71)的外壁相接触。10.根据权利要求1所述的工厂化水产养殖无轨道式智能导航投饲机,其特征在于:所述外壳(18)的后侧设有显示屏(19)。
技术总结
本发明涉及水产养殖技术领域,具体为一种工厂化水产养殖无轨道式智能导航投饲机,包括AGV车身,AGV车身的底部且靠近四个边角的位置均设有L形安装板,每个L形安装板竖直板的内侧均设有驱动电机,驱动电机输出轴的端部穿过L形安装板的内侧且连接有动力轮,AGV车身的底部且位于左端中部的位置设有雷达,AGV车身的顶部且靠近左端中部的位置设有深度相机,AGV车身顶部的上方设有外壳,外壳的顶部且靠近右下角的位置设有储料筒。该工厂化水产养殖无轨道式智能导航投饲机,通过设置的AGV车身,可以实现无轨道导航方式,并且智能规划路径,从而节约成本、节省人力,该投饲机采用基于多传感器融合的环境感知导航技术,能够进行有效避障。障。障。
技术研发人员:孙建明 陈福迪 邱天龙 吴斌 杜以帅 周利 孙明 徐建平
受保护的技术使用者:中国科学院海洋研究所
技术研发日:2021.08.02
技术公布日:2021/10/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。