一种基于ai与北斗技术的番茄自动放蔓机末端执行器
技术领域
1.本实用新型涉及番茄自动放蔓机末端执行器领域,尤其涉及一种基于ai与北斗技术的番茄自动放蔓机末端执行器。
背景技术:
2.现有番茄自动放蔓机末端执行器定位不够精准,结构复杂,并且影响番茄在放慢过程中下降高度的判断,使用效果不佳。
技术实现要素:
3.(一)实用新型目的
4.为解决背景技术中存在的技术问题,本实用新型提出一种基于ai与北斗技术的番茄自动放蔓机末端执行器。
5.(二)技术方案
6.为解决上述问题,本实用新型提出了一种基于ai与北斗技术的番茄自动放蔓机末端执行器,包括执行器本体、舵机组件和机械爪;
7.执行器本体上设置有双目摄像机和北斗卫星导航模块;
8.执行器本体连接舵机组件,舵机组件连接机械爪;舵机组件上设置有用于调节机械爪力度的调节按钮。
9.优选的,双目摄像机设置两个。
10.优选的,两个双目摄像机的型号分别为zed双目立体相机二代,以及intel realsense d435相机。
11.优选的,舵机组件采用转叶式舵机。
12.本实用新型中,机械爪结构简单、结构稳固,且爪子接触面积大,可以更牢固的抓住钩子,并且为了防止钩子在转动放蔓的过程中有滑脱的风险,在这两个夹子之间添加了两块齿装橡胶,从而可以增加摩擦系数,增大摩擦力。
13.本实用新型中,根据机器人预先设置好的程序,自动调控机械爪抓取番茄枝蔓上钩子的力度,特殊情况,可以人为通过操作机械爪力度调节按钮来调控机械爪抓取番茄枝蔓上钩子的力度。
14.本实用新型中,采用北斗卫星导航模块,北斗卫星导航模块比其他导航卫星定位精准度高,抗遮挡能力强的优点精准定位番茄枝蔓上挂钩的位置,使机机械爪可以精准快速的进行番茄枝蔓降蔓的操作。
附图说明
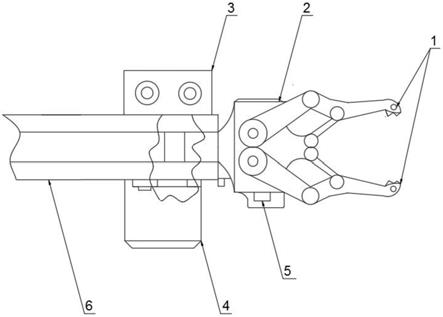
15.图1为本实用新型提出的基于ai与北斗技术的番茄自动放蔓机末端执行器的结构示意图。
具体实施方式
16.为使本实用新型的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本实用新型进一步详细说明。应该理解,这些描述只是示例性的,而并非要限制本实用新型的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本实用新型的概念。
17.如图1所示,本实用新型提出的一种基于ai与北斗技术的番茄自动放蔓机末端执行器,包括执行器本体6、舵机组件2和机械爪1;
18.执行器本体6上设置有双目摄像机3和北斗卫星导航模块4;
19.执行器本体6连接舵机组件2,舵机组件2连接机械爪1;舵机组件2上设置有用于调节机械爪1力度的调节按钮5。
20.本实用新型中,机械爪1结构简单、结构稳固,且爪子接触面积大,可以更牢固的抓住钩子,并且为了防止钩子在转动放蔓的过程中有滑脱的风险,在这两个夹子之间添加了两块齿装橡胶,从而可以增加摩擦系数,增大摩擦力。
21.本实用新型中,根据机器人预先设置好的程序,自动调控机械爪1抓取番茄枝蔓上钩子的力度,特殊情况,可以人为通过操作机械爪力度调节按钮5来调控机械爪1抓取番茄枝蔓上钩子的力度。
22.本实用新型中,采用北斗卫星导航模块4,北斗卫星导航模块4比其他导航卫星定位精准度高,抗遮挡能力强的优点精准定位番茄枝蔓上挂钩的位置,使机机械爪1可以精准快速的进行番茄枝蔓降蔓的操作。
23.在一个可选的实施例中,双目摄像机3设置两个。
24.在一个可选的实施例中,两个双目摄像机3的型号分别为zed双目立体相机二代,以及intel realsense d435相机。
25.需要说明的是,视觉的搭建对执行器本体6乃至机器人本身都相关重要,不仅影响到对需要放蔓的藤蔓精准识别,而且影响到番茄在放蔓过程中下降高度的判断。在硬件上,经过查阅资料和实地的勘察测试最终选择在执行器本体6上搭载两款价格和图像清晰度高、性价比较高的双目摄像机3;同时,为了执行器本体6能在相应的环境更好的使用,进行了专门的计算机视觉模型搭建,并且配合选择的双目摄像机3可以到达最佳的效果
26.在一个可选的实施例中,舵机组件2采用转叶式舵机。
27.需要说明的是,舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。执行器本体6设置的舵机模块2选用了转叶式舵机,其原理是高低压油直接作用于转子,体积小而高效。并通过对舵机控制的控制系统进行了特殊的优化,使执行器本体6更加的适用于番茄放蔓的操作。
28.应当理解的是,本实用新型的上述具体实施方式仅仅用于示例性说明或解释本实用新型的原理,而不构成对本实用新型的限制。因此,在不偏离本实用新型的精神和范围的情况下所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。此外,本实用新型所附权利要求旨在涵盖落入所附权利要求范围和边界、或者这种范围和边界的等同形式内的全部变化和修改例。
技术特征:
1.一种基于ai与北斗技术的番茄自动放蔓机末端执行器,其特征在于,包括执行器本体(6)、舵机组件(2)和机械爪(1);执行器本体(6)上设置有双目摄像机(3)和北斗卫星导航模块(4);执行器本体(6)连接舵机组件(2),舵机组件(2)连接机械爪(1);舵机组件(2)上设置有用于调节机械爪(1)力度的调节按钮(5)。2.根据权利要求1所述的基于ai与北斗技术的番茄自动放蔓机末端执行器,其特征在于,双目摄像机(3)设置两个。3.根据权利要求1所述的基于ai与北斗技术的番茄自动放蔓机末端执行器,其特征在于,两个双目摄像机(3)的型号分别为zed双目立体相机二代,以及intel realsense d435相机。4.根据权利要求1所述的基于ai与北斗技术的番茄自动放蔓机末端执行器,其特征在于,舵机组件(2)采用转叶式舵机。
技术总结
一种基于AI与北斗技术的番茄自动放蔓机末端执行器,包括执行器本体、舵机组件和机械爪;执行器本体上设置有双目摄像机和北斗卫星导航模块;执行器本体连接舵机组件,舵机组件连接机械爪;舵机组件上设置有用于调节机械爪力度的调节按钮。本实用新型中,定位精准度高,抗遮挡能力强,机机械爪可以精准快速的进行番茄枝蔓降蔓的操作。茄枝蔓降蔓的操作。茄枝蔓降蔓的操作。
技术研发人员:郝王丽 宋国柱 韩猛 郭子毓 郑奕博
受保护的技术使用者:山西农业大学
技术研发日:2021.01.26
技术公布日:2021/10/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。