1.本发明涉及原子自旋进动信号检测技术,具体涉及一种基于马赫曾德干涉的原子自旋进动信号检测装置及方法,通过测量两束检测光之间的相位差得到线偏振检测光的旋光角信息进而获得原子自旋进动信号,该方法与检测激光功率及频率无关,避免了激光器性能不稳定给检测系统带来的漂移。可用于原子磁强计、原子陀螺仪等仪器设备中对原子自旋进动信号进行精密测量。
背景技术:
2.无自旋交换弛豫(serf,spin
‑
exchange relaxation free)原子自旋惯性测量凭借其超高灵敏度和超高精度的优势,成为未来惯性测量领域的重要发展方向之一。极化的原子自旋敏感载体惯性转动并产生进动,该进动可与线偏振光发生相互作用并产生旋光效应。因此,原子自旋进动信号的检测可表现为经过碱金属气室后线偏振光的旋光角检测。通常对于高精度的serf原子自旋惯性测量系统,产生的旋光角在微弧度量级,属于微弱信号检测,所以高精度的原子自旋进动信号检测技术是实现高精度serf原子自旋惯性测量的关键技术之一。
3.传统的原子自旋进动信号检测方法比如:法拉第调制器检测、光弹调制检测、偏振平衡差分检测等方法都是利用马吕斯定律通过检测光功率的变化测量偏振信息得到旋光角大小。利用激光偏振信息进行微弱信号检测方案最大的弊端在于偏振信息无法直接得到,而是通过将其转换为光功率进行检测,这样就会导致检测光功率的波动与偏振信息发生耦合,因此检测光功率的稳定性极大地限制了检测精度。虽然可以利用闭环控制技术实现检测光功率的稳定控制,但控制精度仍受激光光源噪声及环境温度等影响,无法满足高精度serf原子自旋进行惯性测量系统的要求。
技术实现要素:
4.本发明要解决的技术问题是:克服现有技术的不足,提出一种基于马赫曾德干涉的原子自旋进动信号检测装置及方法,通过利用电光相位调制的激光作为干涉测量光源,一方面该方法属于零差检测原理,避免了激光光源频率漂移带来的系统误差;另一方面,基于马赫曾德干涉测量技术,通过测量干涉仪两臂之间的相位差得到原子自旋进动信号信息,与检测光功率无关,避免了激光光源功率漂移带来的系统误差,同时能够利用电光调制检测方式,可有效抑制1/f等低频噪声波动,有利于提高原子自旋惯性测量系统的长期稳定性。
5.本发明的技术解决方案如下:
6.基于马赫曾德干涉的原子自旋进动信号检测装置,其特征在于,包括:
7.电光调制器,用于将检测激光进行高频调制,提高微弱信号的检测灵敏度;
8.偏振分光棱镜,用于将光源分为光学特性相同的两束激光,其中一束激光作为信号光构成马赫曾德干涉光路中的第一条光路,另一束激光作为参考光构成马赫曾德干涉光
路中的第二条光路;
9.原子气室,位于所述第一条光路上,在消偏振分光棱镜与所述偏振分光棱镜之间,用于使所述信号光形成相位差;
10.消偏振分光棱镜,用于所述第一条光路与所述第二条光路在其光敏面上重合并形成两路马赫曾德干涉光;
11.锁相放大器,用于通过所述两路马赫曾德干涉光的信号输入,解调得到所述信号光的相位差,以便通过所述相位差提取旋光角信息,进而实现原子自旋进动信号检测。
12.所述两路马赫曾德干涉光包括在所述光敏面的一侧由所述第一条光路的透射信号光和所述第二条光路的反射参考光形成的第一路马赫曾德干涉光,以及在在所述光敏面的另一侧由所述第二条光路的透射参考光和所述第一条光路的反射信号光形成的第二路马赫曾德干涉光。
13.所述第一路马赫曾德干涉光依次经过1/4波片和第二检偏器后输入第二光电探测器,所述第二光电探测器连接所述锁相放大器。
14.所述第二路马赫曾德干涉光经过第一检偏器后输入第一光电探测器,所述第一光电探测器连接所述锁相放大器。
15.所述电光调制器连接驱动器。
16.所述电光调制器通过1/2波片连接检测激光器。
17.所述偏振分光棱镜与所述消偏振分光棱镜之间的第二条光路上设置有第二反射镜。
18.所述原子气室与所述消偏振分光棱镜之间的第一条光路上设置有第一反射镜,所述原子气室位于磁屏蔽系统中。
19.基于马赫曾德干涉的原子自旋进动信号检测方法,其特征在于,包括以下步骤:
20.步骤1,利用电光调制器将检测激光进行相位调制并构成马赫曾德干涉测量光源;
21.步骤2,利用偏振分光棱镜将所述马赫曾德干涉测量光源分为光学特性相同的两束激光,其中一束激光作为信号光构成马赫曾德干涉光路中的第一条光路,另一束激光作为参考光构成马赫曾德干涉光路中的第二条光路;
22.步骤3,利用在消偏振分光棱镜与所述偏振分光棱镜之间的原子气室使所述信号光形成相位差;
23.步骤4,利用消偏振分光棱镜使所述第一条光路与所述第二条光路在其光敏面上重合并形成两路马赫曾德干涉光;
24.步骤5,利用锁相放大器,通过所述两路马赫曾德干涉光的信号输入,解调得到所述信号光的相位差,以便通过所述相位差提取旋光角信息,进而实现原子自旋进动信号检测。所述两路马赫曾德干涉光包括在所述光敏面的一侧由所述第一条光路的透射信号光和所述第二条光路的反射参考光形成的第一路马赫曾德干涉光,以及在在所述光敏面的另一侧由所述第二条光路的透射参考光和所述第一条光路的反射信号光形成的第二路马赫曾德干涉光。
25.所述旋光角与所述相位差的关系式如下:
26.27.其中,θ是原子自旋进动形成的旋光角,c=tanβ1,d=tanβ2,e=tanφ,f=tan(φ
bs
/2),β1是第一路马赫曾德干涉光的第二检偏器透光轴与x轴的夹角,β2是第二路马赫曾德干涉光的第一检偏器透光轴与x轴的夹角,φ是原子气室使所述信号光形成的相位差,φ
bs
是常量,φ=δψ (π/2)
‑
(φ
bs
/2),δψ是锁相放大器直接得出的第一路马赫曾德干涉光与第二路马赫曾德干涉光之间的相位差。
28.本发明的技术效果如下:本发明基于马赫曾德干涉的原子自旋进动信号检测装置及方法,克服现有光弹调制检测、偏振平衡差分检测等传统原子自旋进动信号检测方法输出信号稳定性易受检测光功率波动的不足,提出一种基于马赫曾德干涉的原子自旋进动信号检测装置及方法。该装置利用电光相位调制的激光作为干涉测量光源,一方面该方法属于零差检测原理,避免了激光光源频率漂移带来的系统误差;另一方面,该方法基于马赫曾德干涉测量技术,通过测量干涉仪两臂之间的相位差得到原子自旋进动信号信息,与检测光功率无关,避免了激光光源功率漂移带来的系统误差。同时该检测方法利用电光调制检测方式,可有效抑制1/f等低频噪声波动,有利于提高原子自旋惯性测量系统的长期稳定性。
29.本发明与现有技术相比的优点在于:本发明基于马赫曾德干涉原理,一方面该方法通过测量相位差得到原子自旋进动信号,与检测光的光功率及频率等信息无关,避免了由检测激光器性能带来的波动误差;另一方面该方法属于调制检测方法,可有效抑制1/f等低频噪声的影响(f是频率),有利于提高原子自旋惯性测量系统的长期稳定性。
附图说明
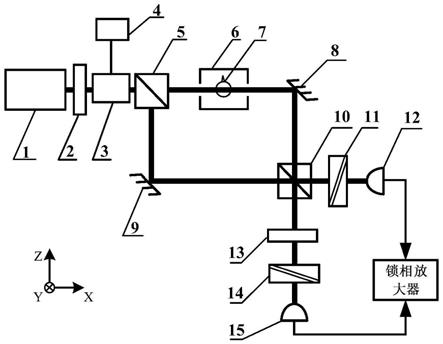
30.图1是实施本发明基于马赫曾德干涉的原子自旋进动信号检测装置的结构示意图。
31.图2是实施本发明基于马赫曾德干涉的原子自旋进动信号检测方法的流程示意图。图2中包括以下步骤:步骤1,检测激光器输出激光被eom进行相位调制;步骤2,相位调制后的检测激光形成两条光路,第一条光路为信号光,第一条光路中包含极化的碱金属气室(或称之为原子气室),第二条光路为参考光;步骤3,两条光路产生相位差φ;步骤4,调节1/4波片及检偏器透光轴位置,使相位差最大,提高检测灵敏度;步骤5,将两路输出光强信号输入至锁相放大器解调得到该相位差;步骤6,根据相位差与旋光角关系得到旋光角,实现原子自旋进动信号的检测。
32.附图标记列示如下:1
‑
检测激光器;2
‑
1/2波片;3
‑
电光调制器(eom,electro
‑
optic modulator);4
‑
驱动器;5
‑
偏振分光棱镜(pbs,polarizing beamsplitter);6
‑
磁屏蔽系统;7
‑
原子气室;8
‑
第一反射镜;9
‑
第二反射镜;10
‑
消偏振分光棱镜(npbs,non
‑
polarizing beamsplitter;或者缩写成bs);11
‑
第一检偏器;12
‑
第一光电探测器;13
‑
1/4波片;14
‑
第二检偏器;15
‑
第二光电探测器;xyz
‑
坐标轴。
具体实施方式
33.下面结合附图(图1
‑
图2)和实施例对本发明进行说明。
34.图1是实施本发明基于马赫曾德干涉的原子自旋进动信号检测装置的结构示意图。图2是实施本发明基于马赫曾德干涉的原子自旋进动信号检测方法的流程示意图。参考
图1至图2所示,基于马赫曾德干涉的原子自旋进动信号检测装置,包括:电光调制器3,用于将检测激光进行高频调制,提高微弱信号的检测灵敏度,并用作马赫曾德干涉测量光源;偏振分光棱镜5,用于将所述马赫曾德干涉测量光源分为光学特性相同的两束激光,其中一束激光作为信号光构成马赫曾德干涉光路中的第一条光路,另一束激光作为参考光构成马赫曾德干涉光路中的第二条光路;原子气室7,位于所述第一条光路上,在消偏振分光棱镜10与所述偏振分光棱镜5之间,用于使所述信号光形成相位差;消偏振分光棱镜10,用于所述第一条光路与所述第二条光路在其光敏面上重合并形成两路马赫曾德干涉光;锁相放大器,用于通过所述两路马赫曾德干涉光的信号输入,解调得到所述信号光的相位差,以便通过所述相位差提取旋光角信息,进而实现原子自旋进动信号检测。
35.所述两路马赫曾德干涉光包括在所述光敏面的一侧由所述第一条光路的透射信号光和所述第二条光路的反射参考光形成的第一路马赫曾德干涉光,以及在在所述光敏面的另一侧由所述第二条光路的透射参考光和所述第一条光路的反射信号光形成的第二路马赫曾德干涉光。所述第一路马赫曾德干涉光依次经过1/4波片13和第二检偏器14后输入第二光电探测器15,所述第二光电探测器15连接所述锁相放大器。所述第二路马赫曾德干涉光经过第一检偏器11后输入第一光电探测器12,所述第一光电探测器12连接所述锁相放大器。所述电光调制器3连接驱动器4。所述电光调制器3通过1/2波片2连接检测激光器1。所述偏振分光棱镜5与所述消偏振分光棱镜10之间的第二条光路上设置有第二反射镜9。所述原子气室7与所述消偏振分光棱镜10之间的第一条光路上设置有第一反射镜8,所述原子气室7位于磁屏蔽系统6中。
36.基于马赫曾德干涉的原子自旋进动信号检测方法,包括以下步骤:步骤1,利用电光调制器将检测激光调制成马赫曾德干涉测量光源;步骤2,利用偏振分光棱镜将所述马赫曾德干涉测量光源分为光学特性相同的两束激光,其中一束激光作为信号光构成马赫曾德干涉光路中的第一条光路,另一束激光作为参考光构成马赫曾德干涉光路中的第二条光路;步骤3,利用在消偏振分光棱镜与所述偏振分光棱镜之间的原子气室使所述信号光形成相位差;步骤4,利用消偏振分光棱镜使所述第一条光路与所述第二条光路在其光敏面上重合并形成两路马赫曾德干涉光;步骤5,利用锁相放大器,通过所述两路马赫曾德干涉光的信号输入,解调得到所述信号光的相位差,以便通过所述相位差提取旋光角信息,进而实现原子自旋进动信号检测,所述两路马赫曾德干涉光包括在所述光敏面的一侧由所述第一条光路的透射信号光和所述第二条光路的反射参考光形成的第一路马赫曾德干涉光,以及在在所述光敏面的另一侧由所述第二条光路的透射参考光和所述第一条光路的反射信号光形成的第二路马赫曾德干涉光。
37.所述旋光角与所述相位差的关系式如下:
[0038][0039]
其中,θ是原子自旋进动形成的旋光角,c=tanβ1,d=tanβ2,e=tanφ,f=tan(φ
bs
/2),β1是第一路马赫曾德干涉光的第二检偏器透光轴与x轴的夹角,β2是第二路马赫曾德干涉光的第一检偏器透光轴与x轴的夹角,φ是原子气室使所述信号光形成的相位差,φ
bs
是常量,φ=δψ (π/2)
‑
(φ
bs
/2),δψ是锁相放大器直接得出的第一路马赫曾德干涉光与第二路马赫曾德干涉光之间的相位差。
[0040]
基于马赫曾德干涉的原子自旋进动信号检测装置及方法,利用马赫曾德干涉测量技术,通过测量两条输出光束间的相位差得到原子自旋进动信号,有效避免了由于检测光功率及频率波动制约原子自旋进动信号检测精度提升的不足。该方法将电光相位调制器调制的检测激光作为干涉测量光源,并利用偏振分光棱镜将激光分为光学特性相同的两束激光,构成马赫曾德干涉光路,将极化的碱金属气室置于干涉仪的一条光路中用于形成相位差,两条光路最终在消偏振棱镜的光敏面上重合并形成干涉,最后利用锁相放大器解调得到相位差,从而实现高精度的原子自旋进动信号检测。本发明基于马赫曾德干涉原理,一方面该方法通过测量相位差得到原子自旋进动信号,与检测光的光功率及频率等信息无关,避免了由检测激光器性能带来的波动误差;另一方面该方法属于调制检测方法,可有效抑制1/f等低频噪声的影响,有利于提高原子自旋惯性测量系统的长期稳定性。
[0041]
一种基于马赫曾德干涉的原子自旋进动信号检测装置及方法,其特征在于:该装置包括检测激光器1、1/2波片2、电光调制器(eom)3、驱动器4、偏振分光棱镜(pbs)5、磁屏蔽系统6、原子气室7、第一反射镜8、第二反射镜9、消偏振分光棱镜(bs)10、第一检偏器11、第一光电探测器12、1/4波片13、第二检偏器14、第二光电探测器15和锁相放大器。其中,检测激光器1出射的激光经过1/2波片2调整激光的偏振方向后入射至电光调制器3,一个角频率为ω、幅值为φ0的外部正弦电压信号φ(t)=φ0sinωt,t是时间,通过驱动器4加到电光调制器3上实现检测激光的相位调制,并被偏振分光棱镜5分成透射光(p光)和反射光(s光)两路传播。其中p光作为信号光依次经过磁屏蔽系统6内的原子气室7及第一反射镜8到达消偏振分光棱镜10;另一路s光作为参考光经过第二反射镜9也到达消偏振分光棱镜(bs)10。该光路为典型的马赫曾德干涉光路,透射的s光和反射的p光在消偏振分光棱镜10的光敏面上相遇叠加后,经过第一检偏器11到达第一光电探测器12;同时,另一路透射的p光和反射的s光组成在消偏振分光棱镜10的光敏面上叠加后,经过1/4波片13与第二检偏器14到达第二光电探测器15。两个光电探测器的输出光强信号输入到锁相放大器中进行相位分析,最终可以得到相位差的大小,通过测得相位差即可实现原子自旋进动信号的检测。
[0042]
1/2波片2与电光调制器(eom)3的光轴平行且均与x轴成45
°
;第一反射镜8与第二反射镜9与激光传播方向成45
°
,使激光垂直反射;消偏振分光棱镜(bs)10光轴与x轴成45
°
;1/4波片13的光轴平行x轴即经过1/4波片后仍为线偏振光;第一检偏器11和第二检偏器14的透光轴应选择合适的角度使锁相放大器最终输出的相位差达到最大值。
[0043]
电光调制器(eom)3可以选用空间型的器件,为减小检测系统的体积也可以使用光纤型的器件。若使用光纤型eom,激光源也应为尾纤输出激光。
[0044]
若使用光纤型eom进行实验,则偏振分光棱镜5可以用尾纤为保偏光纤的光纤分束器替代,可以调整光纤光路去掉第一反射镜8、第二反射镜9进一步减小检测系统的体积。
[0045]
通过将正弦电压信号输入到驱动器4实现电光调制器的相位调制功能,可以改变调制信号的偏置及频率等信息进行优化该检测方法的检测精度。
[0046]
本发明的原理是:失谐的线偏振检测光经过极化的原子气室后,由于原子气室的圆双折射性使经过的线偏振光发生旋光现象,通过测量该旋光角可以得到载体惯性转动信息。本发明提出一种基于马赫曾德干涉的原子自旋进动信号检测装置及方法,通过测量经过干涉仪后两束激光的相位差提取旋光角信息。具体原理为:
[0047]
线偏振的检测光经过1/2波片(快轴与x轴成45
°
角)后,激光的琼斯矩阵可表示为:
[0048][0049]
经过调制信号为φ(t)=φ0sinωt的电光调制器后变为:
[0050][0051]
eom输出的调制激光经过pbs后分为两束光,其中透射的p光作为信号光经过原子气室,反射的s光作为参考光,两束光构成马赫曾德干涉光路并在bs的光敏面上重遇发生光波叠加干涉。经过bs,透射的信号光与反射的参考光干涉后琼斯矩阵表示为:
[0052][0053]
另一路反射的信号光与透射的参考光干涉后琼斯矩阵表示为:
[0054][0055]
式中下标p和s表示经过pbs后分成的p偏振光和s偏振光,1和2表示bs的输出,θ是原子自旋进动形成的旋光角。设d为这两条路径之间的光程差,φ
bs
与φ
ma
、φ
mb
分别代表了bs和两个反射镜处p偏振和s偏振光之间的相位差。
[0056]
干涉光e
t
经过1/4波片(快轴位于x轴)和第一检偏器(透光轴与x轴成β1角度)之后,变成e
′
t
并由第一光电探测器d
t
探测,琼斯矩阵表示为:
[0057]
e
′
t
=e
pat
(β1)
·
e
q
(0
°
)
·
e
t
[0058]
第一光电探测器d
t
探测到的光强为:
[0059][0060]
式中:
[0061][0062]
另一路干涉光e
r
通过第二检偏器(透光轴与x轴成β2角度)变成e
′
r
,并由第二光电探测器d
r
探测,琼斯矩阵表示为:
[0063]
e
′
r
=e
par
(β2)
·
e
r
[0064]
第二光电探测器d
r
探测到的光强为:
[0065][0066]
式中:
[0067]
ψ
r
=kd (φ
mb
‑
φ
ma
) φ
r
[0068][0069]
将两路光强输入锁相放大器进行相位解调得到相位差δψ(δψ=ψ
t
‑
ψ
r
),令最终相位差φ=δψ (π/2)
‑
(φ
bs
/2),则旋光角与相位差的关系为:
[0070][0071]
式中:c=tanβ1,d=tanβ2,e=tanφ,f=tan(φ
bs
/2)
[0072]
由此可见,基于马赫曾德干涉的方法实现了原子自旋进动信号的检测。
[0073]
图1为本发明基于马赫曾德干涉的原子自旋进动信号检测装置实施结构框图。由图可见,本发明基于马赫曾德干涉的原子自旋进动信号检测装置由检测激光器1、1/2波片2、电光调制器(eom)3、驱动器4、偏振分光棱镜(pbs)5、磁屏蔽系统6、原子气室7、第一反射镜8、第二反射镜9、消偏振分光棱镜(bs)10、第一检偏器11、第一光电探测器12、1/4波片13、第二检偏器14、第二光电探测器15和锁相放大器组成。
[0074]
线偏振的检测光经过1/2波片(快轴与x轴成45
°
角)后,激光的琼斯矩阵可表示为:
[0075][0076]
经过调制信号为φ(t)=φ0sinωt的电光调制器后变为:
[0077][0078]
eom输出的调制激光经过pbs后分为两束光,其中透射的p光作为信号光经过原子气室,反射的s光作为参考光,两束光构成马赫曾德干涉光路并在bs的光敏面上重遇发生光波叠加干涉。经过bs,透射的信号光与反射的参考光干涉后琼斯矩阵表示为:
[0079][0080]
另一路反射的信号光与透射的参考光干涉后琼斯矩阵表示为:
[0081][0082]
式中下标p和s表示经过pbs后分成的p偏振光和s偏振光,1和2表示bs的输出,θ是原子自旋进动形成的旋光角。设d为这两条路径之间的光程差,φ
bs
与φ
ma
、φ
mb
分别代表了bs和两个反射镜处p偏振和s偏振光之间的相位差。
[0083]
干涉光e
t
经过1/4波片(快轴位于x轴)和第一检偏器(透光轴与x轴成β1角度)之后,变成e
′
t
并由第一光电探测器d
t
探测,琼斯矩阵表示为:
[0084]
e
′
t
=e
pat
(β1)
·
e
q
(0
°
)
·
e
t
[0085]
第一光电探测器d
t
探测到的光强为:
[0086][0087]
式中:
[0088][0089]
另一路干涉光e
r
通过第二检偏器(透光轴与x轴成β2角度)变成e
′
r
,并由第二光电探测器d
r
探测,琼斯矩阵表示为:
[0090]
e
′
r
=e
par
(β2)
·
e
r
[0091]
第二光电探测器d
r
探测到的光强为:
[0092][0093]
式中:
[0094]
ψ
r
=kd (φ
mb
‑
φ
ma
) φ
r
[0095][0096]
将两路光强输入锁相放大器进行相位解调得到相位差δψ(δψ=ψ
t
‑
ψ
r
),令最终相位差φ=δψ (π/2)
‑
(φ
bs
/2),则旋光角与相位差的关系为:
[0097][0098]
式中:c=tanβ1,d=tanβ2,e=tanφ,f=tan(φ
bs
/2)。从而实现原子自旋进动信号的的检测。
[0099]
图2为本发明基于马赫曾德干涉的原子自旋进动信号检测方法流程图。由图可见,该方法首先将检测激光器输出激光输入eom中进行相位调制,调制信号通过施加在驱动器上的电压信号提供。调制后的激光经pbs后分为光学特性相同的两束激光并组成马赫曾德干涉光路。将极化的碱金属气室置于马赫曾德干涉仪的一条光路中作为信号光,另一条光路作为参考光,两条光路最终在bs的光敏面上形成干涉,且输出干涉光携有原子气室产生的相位差。为提高原子自旋进动信号的检测灵敏度,干涉后的两束检测光分别经过方位角适当的检偏器并由光电探测器探测,探测信号输入到锁相放大器中进行相位分析得到该相位差,最终根据理论分析得到的相位差与旋光角关系表达式得到旋光角信息,从而实现了基于马赫曾德干涉的高精度原子自旋进动信号检测。
[0100]
本发明说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。在此指明,以上叙述有助于本领域技术人员理解本发明创造,但并非限制本发明创造的保护范围。任何没有脱离本发明创造实质内容的对以上叙述的等同替换、修饰改进和/或删繁从简而进行的实施,均落入本发明创造的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

