1.本实用新型涉及机器人技术领域,具体而言,涉及一种磁吸爬壁机器人。
背景技术:
2.随着建筑行业的不断发展,高空作业需求也逐年上升。一些行业如石化、船舶、消防等,对工业特种环境下的金属检测、喷涂等有着大量需求,但传统的作业方式往往是人工手持机器设备操作。这种作业方式普遍存在危险性高,作业成本高,操作效率低,误差大等痛点,因此需要机器去替代人类在石化、建筑、船舶以及消防安全等重要领域中的危险环境下工作,实现特种环境下的垂直壁面作业任务。
3.现有磁吸附爬壁机器人一般采用轮式结构,磁轮组包括磁铁轮及多块沿磁体轮两侧圆周方向分布的轭铁块,扼铁块相互之间存在磁作用力,磁损耗大,作用于工作壁面的有效磁能少,遇到壁面凸起或需要越过大焊缝时,磁轮组因吸附不足易产生打滑,机器人运行不稳定、易倾覆。
技术实现要素:
4.本实用新型旨在提出一种磁吸爬壁机器人,以解决现有磁吸爬壁机器人运行不稳定、易打滑的技术问题。
5.为达到上述目的,本实用新型的技术方案是这样的:
6.一种磁吸爬壁机器人,包括机身和运动机构,所述运动机构安装在所述机身上,所述运动机构包括传动组件和磁轮组,所述传动组件与所述磁轮组驱动连接以通过所述磁轮组带动所述机身运动,所述磁轮组包括多个环状结构的轭铁轮与多个磁铁轮,各所述轭铁轮与所述磁铁轮沿轴向交叠设置。
7.本实用新型所述的磁吸爬壁机器人,传动组件安装在机身上,传动组件驱动磁轮组运动以带动机身运动,磁轮组采用由环状的轭铁轮与磁铁轮交叠构成,在爬壁过程中,磁性n极始终在磁轮组外圆柱面,采用辐射充磁方式,避免使用多块磁铁时磁极交替导致磁力骤降的问题,且在垂直壁面方向磁场强度最大,磁轮组吸附力和承载力也更大;
8.通过增加磁铁轮的数量及磁轮组的厚度可以增强磁场强度,使得磁轮组与壁面之间的缝隙(也即工作间隙)内积累更多的磁能,磁吸附能力强,运动承载更加稳定,不易打滑倾翻;
9.磁铁轮与扼铁轮均为整块形状,相较于现有的在磁铁轮两侧沿圆周分布多个轭铁块的磁轮组结构,能够减少扼铁轮相互之间的磁作用力,减少了扼铁轮对磁能的损耗,使得磁路尽可能多的通过工作间隙,工作间隙内积累的磁能多,磁吸附能力强。
10.可选地,所述传动组件包括轮架、无刷电机、行星减速器、传动皮带及运动轴,所述轮架与所述机身连接,所述无刷电机和所述运动轴安装在所述轮架上,所述无刷电机与所述行星减速器驱动连接,所述行星减速器通过所述传动皮带与所述运动轴传动连接,所述运动轴上适于安装所述磁轮组。
11.可选地,还包括可调阻尼转轴机构,所述机身包括第一箱体和第二箱体,所述第一箱体和所述第二箱体分别安装有一所述运动机构,所述可调阻尼转轴机构设置于所述第一箱体和所述第二箱体之间以调节所述第一箱体与所述第二箱体之间的角度。
12.可选地,所述可调阻尼转轴机构包括连接轴、连接轴套、第一法兰轴承及可调阻尼器,所述连接轴的一端与所述第一箱体连接,所述连接轴的另一端插入所述连接轴套并通过所述连接轴套与所述第二箱体连接,所述连接轴与所述连接轴套之间通过所述第一法兰轴承转动连接,以适于使所述第一箱体与所述第二箱体发生相对转动,所述连接轴在远离所述第一箱体的一端还通过所述可调阻尼器与所述第二箱体连接,所述可调阻尼器适于调节所述连接轴的转动阻尼大小。
13.可选地,该磁吸爬壁机器人还包括齿轮转向机构,所述第一箱体通过所述齿轮转向机构与对应的所述运动机构连接,所述齿轮转向机构适于调节所述运动机构相对所述第一箱体的转动角度。
14.可选地,所述齿轮转向机构包括第一舵机、减速齿轮组、转动轴及隔板,所述隔板安装在所述第一箱体的内部,所述第一舵机安装在所述隔板上,所述第一舵机通过所述减速齿轮组与所述转动轴转动连接,所述转动轴的一端与所述隔板转动连接,所述转动轴的另一端与所述轮架转动连接,所述第一舵机通过所述减速齿轮组带动所述转动轴转动,所述转动轴转动以带动所述轮架及所述磁轮组转动。
15.可选地,所述齿轮转向机构还包括第二法兰轴承、第三法兰轴承及推力球轴承,所述第二法兰轴承、所述第三法兰轴承及所述推力球轴承均套设在所述转动轴上,所述转动轴的上端通过所述第三法兰轴承与所述隔板转动连接,所述第三法兰轴承通过所述推力球轴承与所述减速齿轮组连接,所述减速齿轮组的下端通过所述第二法兰轴承与所述转动轴转动连接。
16.可选地,该磁吸爬壁机器人还包括超声波探伤检测装置和舵机升降装置,所述超声波探伤检测装置包括超声波探伤仪本体及与所述超声波探伤仪本体连接的检测探头,所述超声波探伤仪本体设于所述机身上,所述检测探头通过所述舵机升降装置连接在所述机身底部。
17.可选地,所述舵机升降装置包括舵机架、第二舵机、舵机连杆、探头连杆及探头固定筒,所述第二舵机通过所述舵机架安装在所述机身底部,所述第二舵机经依次连接的所述舵机连杆、所述探头连杆与所述探头固定筒连接,所述探头固定筒适于安装所述检测探头。
18.可选地,所述舵机升降装置还包括升降杆和升降限位器,所述舵机架与所述探头固定筒之间还连接所述升降杆,所述探头固定筒通过所述升降限位器与所述升降杆连接,所述升降限位器适于限制所述探头固定筒沿竖直方向升降。
附图说明
19.图1为本实用新型实施例的磁吸爬壁机器人在传动皮带的外壳去掉时的立体图;
20.图2为本实用新型实施例的磁吸爬壁机器人的主视图;
21.图3为本实用新型实施例的传动组件的结构示意图;
22.图4为本实用新型实施例的可调阻尼转轴机构的结构示意图;
23.图5为本实用新型实施例的齿轮转向机构的结构示意图;
24.图6为本实用新型实施例的舵机升降装置的结构示意图;
25.图7为本实用新型实施例的单个磁铁轮的立体结构示意图;
26.图8为图7所述磁铁轮的磁路结构示意图;
27.图9为图7所述磁铁轮的剖面图。
28.附图标记说明:
[0029]1‑
机身;11
‑
第一箱体;12
‑
第二箱体;2
‑
运动机构;21
‑
传动组件;211
‑
轮架;212
‑
无刷电机;213
‑
行星减速器;214
‑
传动皮带;215
‑
运动轴;22
‑
磁轮组;221
‑
轭铁轮;222
‑
磁铁轮;3
‑
可调阻尼转轴机构;31
‑
连接轴;32
‑
连接轴套;33
‑
第一法兰轴承;34
‑
可调阻尼器;35
‑
固定法兰;4
‑
齿轮转向机构;41
‑
第一舵机;42
‑
减速齿轮组;43
‑
转动轴;44
‑
隔板;45
‑
第二法兰轴承;46
‑
第三法兰轴承;47
‑
推力球轴承;5
‑
超声波探伤检测装置;51
‑
超声波探伤仪本体;52
‑
检测探头;6
‑
舵机升降装置;61
‑
舵机架;62
‑
第二舵机;63
‑
舵机连杆;64
‑
探头连杆;65
‑
探头固定筒;66
‑
升降杆;67
‑
升降限位器;7
‑
图像处理装置。
具体实施方式
[0030]
为使本实用新型的上述目的、特征和优点能够更为明显易懂,下面结合附图对本实用新型的具体实施例做详细的说明。
[0031]
在本实用新型的描述中,应当说明的是,各实施例中的术语名词例如“上”、“下”、“前”、“后”等指示方位的词语,只是为了简化描述基于说明书附图的位置关系,并不代表所指的元件和装置等必须按照说明书中特定的方位和限定的操作及方法、构造进行操作,该类方位名词不构成对本实用新型的限制。
[0032]
本文中设置有坐标系xyz,其中x轴的正向代表右方向,x轴的反向代表左方向,y轴的正向代表前方向,y轴的反向代表后方向,z轴的正向代表上方,z轴的反向代表下方。
[0033]
如图1
‑
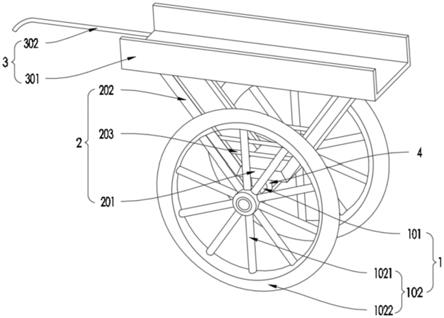
2所示,本实用新型实施例的一种磁吸爬壁机器人,包括机身1和运动机构2,所述运动机构2安装在所述机身1上,所述运动机构2包括传动组件21和磁轮组22,所述传动组件21与所述磁轮组22驱动连接以通过所述磁轮组22带动所述机身1运动,所述磁轮组22包括多个环状结构的轭铁轮221与多个磁铁轮222,各所述轭铁轮221与所述磁铁轮222沿轴向交叠设置。
[0034]
在本实施例中,机身1采用铝骨架结构,尽可能地减轻重量;所述运动机构2驱动安装在所述机身1的底部,所述运动机构2的数量可根据行驶需要及机身1长度灵活设置;所述机身1通过所述传动组件21与所述磁轮组22连接,传动组件21驱动所述磁轮组22使其带动机身1在管道壁面上爬行。
[0035]
如图3所示,本实施例所述磁轮组22包括三个轭铁轮221和两个磁铁轮222(如图7所示),当然所述轭铁轮221与所述磁铁轮222的数量也可以是其它情况,所述轭铁轮221与所述磁铁轮222共轴线,各所述轭铁轮221与所述磁铁轮222依次交替设置,采用辐射充磁(也称全径向充磁)方式,如图8
‑
9所示,磁性n极始终在磁铁轮222外圆柱面,磁性s极在磁铁轮222内侧,形成由s指向n的磁路,避免使用多块磁铁时磁极交替导致磁力骤降的问题,且在垂直壁面方向磁场强度最大,磁轮组22吸附力和承载力也更大;
[0036]
增加磁体轮222数量及磁轮组22厚度可以显著增加磁场强度和磁场范围,使得工
作间隙(磁轮组22与爬行壁面间缝隙)处积累的磁能更多,磁吸附能力强;
[0037]
磁铁轮222与扼铁轮221呈环状且间隔设置,相较于现有的在磁铁轮两侧沿圆周分布多个轭铁块的磁轮组结构,能够减少扼铁轮相互之间的磁作用力,减少了扼铁轮对磁能的损耗,使得磁路尽可能多的通过工作间隙,工作间隙内积累的磁能多,磁吸附能力强;当然现有的有采用径向充磁和轴向充磁方式,这些充磁方式均存在磁吸附小、磁能积损耗严重的缺陷;
[0038]
当壁面直径增大时,磁轮组22与壁面之间的有效接触面积增大,直至磁轮组22与壁面完全贴合,此时工作间隙内积累的磁能也更多。
[0039]
所采用的轭铁轮221一般为硅钢轮,采用的磁铁轮222为钕磁轮。一般地,所述磁铁轮222的直径略小于扼铁轮221的直径,保护磁体轮222不易被磨损,始终能够保持较高的磁场强度,减小摩擦力,进而减小机器人的运行阻力,更能适应不平整的爬行壁面。
[0040]
可选地,如图3所示,所述传动组件21包括轮架211、无刷电机212、行星减速器213、传动皮带214及运动轴215,所述轮架211与所述机身1连接,所述无刷电机212和所述运动轴215安装在所述轮架211上,所述无刷电机212与所述行星减速器213驱动连接,所述行星减速器213通过所述传动皮带214与所述运动轴215传动连接,所述运动轴215上适于安装所述磁轮组22。
[0041]
在本实施例中,所述轮架211上安装有无刷电机212,所述无刷电机212采用大功率直流无刷电机,所述无刷电机212的输出端连接有所述行星减速器213,所述行星减速器213采用三级行星齿轮减速器,所述无刷电机212与所述行星减速器213共轴线(轴线沿图中y轴所在方向);所述轮架211相对的两侧壁之间垂直安装有运动轴211,所述磁轮组22通过轮系轴套安装在所述运动轴211上,所述运动轴211的轴线与所述无刷电机212的轴线平行,所述行星减速器213的输出端连接有20齿带轮,所述运动轴211的输入端连接有32齿带轮,所述20齿带轮与所述32齿带轮之间通过所述传动皮带214传动连接,所述传动皮带214外部罩设有外壳。
[0042]
所述无刷电机212驱动所述行星减速器213运动,再通过传动皮带214将运动传递到所述运动轴215上,运动轴215的转动带动其上的磁轮组22运动,进而实现机器人的移动。所述传动组件21的整体结构紧凑,能够提供高扭矩,保证了机器人低速越障稳定性,同时在静止时可防止重力与负载导致的打滑。
[0043]
可选地,该磁吸爬壁机器人还包括可调阻尼转轴机构3,所述机身1包括第一箱体11和第二箱体12,所述第一箱体11和所述第二箱体12分别安装有一所述运动机构2,所述可调阻尼转轴机构3设置于所述第一箱体11和所述第二箱体12之间以调节所述第一箱体11与所述第二箱体12之间的角度。
[0044]
在本实施例中,通过两所述运动机构2带动所述第一箱体11和所述第二箱体12运动,所述第二箱体12与相对应的所述运动机构2的轮架211一体设计。
[0045]
为了避免在转向的过程中,所述第一箱体11和所述第二箱体12因角度相差太大造成机身1倾覆,在所述第一箱体11与所述第二箱体12之间安装可调阻尼转轴机构3,所述可调阻尼转轴机构3可调节转向阻尼大小,并且具有0~270
°
的角度范围限制;所述可调阻尼转轴机构3还能保证磁轮组22总是能以最佳吸附角度贴合壁面,使得机器人灵活攀附在管道外壁上以进行作业,机器人允许工作壁面角度范围为0~180
°
,可实现全角度工作,具有
更小的环境限制。
[0046]
可选地,如图4所示,所述可调阻尼转轴机构3包括连接轴31、连接轴套32、第一法兰轴承33及可调阻尼器34,所述连接轴31的一端与所述第一箱体11连接,所述连接轴31的另一端插入所述连接轴套32并通过所述连接轴套32与所述第二箱体12连接,所述连接轴31与所述连接轴套32之间通过所述第一法兰轴承33转动连接,以适于使所述第一箱体11与所述第二箱体12发生相对转动,所述连接轴31在远离所述第一箱体11的一端还通过所述可调阻尼器34与所述第二箱体12连接,所述可调阻尼器34适于调节所述连接轴31的转动阻尼大小。
[0047]
在本实施例中,所述连接轴31、连接轴套32分别固定在所述第一箱体11、所述第二箱体12上,所述连接轴31与所述连接轴套32之间通过所述第一法兰轴承33转动连接,以实现所述第一箱体11与所述第二箱体12之间的相对转动。为了保证连接轴31与所述第一箱体11之间的连接稳固性,所述连接轴31在与所述第一箱体11连接的一端还套设有固定法兰35,所述固定法兰35辅助所述连接轴31固定在所述第一箱体11上;所述连接轴31在远离所述第一箱体11的一端通过所述可调阻尼器34与所述第二箱体12连接,所述可调阻尼器34可通过调节螺钉调节转动阻尼大小,以维持所述第一箱体11与所述第二箱体12之间的相对稳定性。
[0048]
可选地,该磁吸爬壁机器人还包括齿轮转向机构4,所述第一箱体11通过所述齿轮转向机构4与对应的所述运动机构2连接,所述齿轮转向机构4适于调节所述运动机构2相对所述第一箱体11的转动角度。
[0049]
在本实施例中,为了调节机器人的运动方向,所述第一箱体11与对应的运动机构2之间转动连接有齿轮转向机构4,所述齿轮转向机构4驱动对应的所述运动机构2相对所述第一箱体11转动,进而实现改变机器人运动方向的目的。
[0050]
可选地,如图5所示,所述齿轮转向机构4包括第一舵机41、减速齿轮组42、转动轴43及隔板44,所述隔板44安装在所述第一箱体11的内部,所述第一舵机41安装在所述隔板44上,所述第一舵机41通过所述减速齿轮组42与所述转动轴43转动连接,所述转动轴43的一端与所述隔板44转动连接,所述转动轴43的另一端与所述轮架211转动连接,所述第一舵机41通过所述减速齿轮组42带动所述转动轴43转动,所述转动轴43转动以带动所述轮架211及所述磁轮组22转动。
[0051]
在本实施例中,所述隔板44呈u型,固定安装在所述第一箱体11的内部,u型隔板的底部垂直向下(即为z轴反向所指的方向)安装有所述转动轴43,所述转动轴43的另一端通过转向法兰与所述轮架211转动连接,所述转动轴43上套设有34齿的齿轮,所述u型隔板上还安装有所述第一舵机41,所述第一舵机41的输出轴与所述转动轴43的轴向平行,所述第一舵机41的输出轴通过金属舵盘与27齿的齿轮连接,所述27齿的齿轮与所述34齿的齿轮相互啮合构成所述减速齿轮组42。
[0052]
所述第一舵机41驱动所述减速齿轮组42转动,经减速齿轮组42减速后传递给转动轴43,转动轴43通过所述轮架211带动所述磁轮组22转动,实现带动机器人转向的目的,转动角度范围为0—120
°
。
[0053]
可选地,如图5所示,所述齿轮转向机构4还包括第二法兰轴承45、第三法兰轴承46及推力球轴承47,所述第二法兰轴承45、所述第三法兰轴承46及所述推力球轴承47均套设
在所述转动轴43上,所述转动轴43的上端(z轴正向所指示的方向)通过所述第三法兰轴承46与所述隔板44转动连接,所述第三法兰轴承46通过所述推力球轴承47与所述减速齿轮组42连接,所述减速齿轮组42的下端(z轴反向所指示的方向)通过所述第二法兰轴承45与所述转动轴43转动连接。
[0054]
在本实施例中,为了降低减速齿轮组42与转动轴43之间的动力传递摩擦系数及轴向限定34齿的齿轮位置,所述34齿的齿轮的上端通过所述推力球轴承47及所述第三法兰轴承46与所述转动轴43连接,所述34齿的齿轮的下端通过所述第二法兰轴45与所述转动轴43连接,所述第二法兰轴承45、所述第三法兰轴承46、所述推力球轴承47及所述34齿的齿轮共轴线设置,更好地保证传动平滑性与稳定性。
[0055]
可选地,该磁吸爬壁机器人还包括超声波探伤检测装置5和舵机升降装置6,所述超声波探伤检测装置5包括超声波探伤仪本体51及与所述超声波探伤仪本体51连接的检测探头52,所述超声波探伤仪本体51设于所述机身1上,所述检测探头52通过所述舵机升降装置6连接在所述机身1底部。
[0056]
在本实施例中,所述检测探头52一般固定在所述机身1底部,所述检测探头52用于检测管道壁面缺陷情况,所述检测探头52检测到的数据信息传递到所述超声波探伤仪本体51上,所述超声波探伤仪本体51用于信号处理、显示。
[0057]
在另一实施例中,所述超声波探伤检测装置5还可用视觉监测装置、红外探测装置等替代。
[0058]
在另一实施例中,还可搭载其他的检测机构以进行喷砂除锈、喷漆防腐、焊接涂装等。
[0059]
可选地,如图6所示,所述舵机升降装置6包括舵机架61、第二舵机62、舵机连杆63、探头连杆64及探头固定筒65,所述第二舵机62通过所述舵机架61安装在所述机身1底部,所述第二舵机62经依次连接的所述舵机连杆63、所述探头连杆64与所述探头固定筒65连接,所述探头固定筒65适于安装所述检测探头52。
[0060]
在本实施例中,所述舵机架61固定在所述机身1底部,所述第二舵机62设于所述舵机架61上,所述第二舵机62采用双出轴舵机,所述第二舵机62的输出端转动连接所述舵机连杆63,所述舵机连杆63转动连接所述探头连杆64,所述探头连杆64的另一端固定在所述探头固定筒65的侧壁上,所述第二舵机62驱动舵机连杆63动作,进而通过所述舵机连杆63带动所述探头连杆64运动,通过两级连杆的运动带动所述探头固定筒65及检测探头52垂直升降,以实现对不同厚度壁面(包括壁面凸起或壁面凹陷等特殊情况)的检测。
[0061]
当然在其它的实施例中,所述第二舵机62也可采用单出轴舵机,所述单出轴舵机的输出端通过舵机连杆直接连到所述探头固定筒上,单出轴舵机通过舵机连杆驱动所述探头固定筒及检测探头垂直升降。
[0062]
可选地,如图6所示,所述舵机升降装置6还包括升降杆66和升降限位器67,所述舵机架61与所述探头固定筒65之间还连接所述升降杆66,所述探头固定筒65通过所述升降限位器67与所述升降杆66连接,所述升降限位器67适于限制所述探头固定筒65沿竖直方向升降。
[0063]
在本实施例中,所述升降限位器67为双头铝柱,所述升降限位器67固定在所述升降杆66的内侧,所述探头固定筒65的侧壁设有用于耳部,所述升降限位器67穿设于所述耳
部内,所述第二舵机62带动所述探头固定筒65沿所述升降限位器67垂直升降。
[0064]
为了实现对特殊环境如高温高压、化学污染下金属壁面的检查,在所述机身1的前方(y轴正向所指的方向)还设有图像处理装置7;所述图像处理装置7包括摄像头、处理芯片及显示屏,所述摄像头采集的壁面信息传输到处理芯片,经处理之后传输到所述显示屏进行显示。
[0065]
为了实现无线遥控与远程控制,所述无刷电机212、第一舵机41、第二舵机62及图像处理装置7均连接到无线遥控机构。
[0066]
虽然本公开披露如上,但本公开的保护范围并非仅限于此。本领域技术人员在不脱离本公开的精神和范围的前提下,可进行各种变更与修改,这些变更与修改均将落入本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。