用于侦测运输船的装置、系统及方法
1.本发明是有关于一种用于侦测运输船位置的装置、系统及方法,特别是用于位在受真空的空间的运输船。上述装置、系统及方法更进一步用于导引且机械固定运输船的端位置。在本发明涵义中的运输船可指英文中的“sintering shoes(烧结块)”,且根据本揭露,亦包括用在各式技术应用中的运输盘或工件载具。
背景技术:
2.运输船、运输盘或工件载具是用在多样的运输货物的技术领域中。
3.举例来说,运输船是用于制造核燃料元件的作业,用于在烧结炉中运输混合氧化物靶丸(mixed oxide pellets,mox pellets)。运输船装载有压入混合氧化物靶丸的燃料粉末,以在后续通过运输船在一设施内移动这些混合氧化物靶丸。举例来说,运输船移动至一烧结炉中,以用200℃至2000℃的温度及80千帕与120千帕之间的压力,烧结装载在其上的混合氧化物靶丸。接着进一步运输混合氧化物靶丸,例如通过运输船,用于后续的卸载。
4.为了以目标的、安全且精确的方式在一设施中移动运输船、运输盘或工件载具,例如以所需方式将其在站与站之间移动,必须确定运输船的位置。
5.因此,本发明的任务是提供一种能够侦测运输船的位置的装置、系统及方法。特别是可应用在受真空的环境中的装置、系统及方法。
6.此任务通过根据独立专利权利要求的装置、系统及方法来解决。进一步的实施例及装置、系统及系统的实施例为从属权利要求和以下说明书的主题。
技术实现要素:
7.本发明的一种型态有关于一种用于侦测运输船的装置,特别是用于侦测运输船的位置。上述装置包括一接触元件及一连接元件,接触元件用于接触一运输船,连接元件弹性安装在装置的一壳体中。连接元件偏压在一初始位置中,且线性可位移地经由壳体的一导引件而导引。较佳地,连接元件具有一长形,包含一纵轴,且可在壳体中沿着纵轴位移。根据本发明的装置的接触元件连接至弹性安装的连接元件,且可与连接元件一起位移,借此,运输船与接触元件的接触导致连接元件的偏斜且抵抗偏压而从初始位置至一侦测位置。为此目的,接触元件可特别地附接至连接元件中与弹簧安装相反的一端。据此,接触元件及连接元件各自偏压在初始位置中,且可从这个分别的初始位置,通过运输船与接触元件之间抵抗偏压的接触,偏斜至一侦测位置。上述装置更包括一侦测装置,适合用以侦测连接元件到达侦测位置。换句话说,因此可通过侦测装置侦测通过运输船造成的接触元件的偏斜。
8.可通过侦测装置侦测的通过运输船造成的连接元件或接触元件的偏斜,以及借此导致的侦测位置的到达,可导出运输船的位置的推论,并因此可侦测运输船的位置。因为上述装置配置在整体系统中使用者已知的限定位置,例如当侦测装置起动时,可侦测运输船接触接触元件的位置。在一实施例中,到达侦测位置的侦测可结合关联的侦测时间及/或结合进一步的设施/制程参数。举例来说,到达侦测位置的侦测亦可结合运输船的形状及/或尺寸的特性。
9.应了解的是,运输船的位置亦可通过从侦测位置移动,例如暂时回到初始位置,的连接元件来侦测。举例来说,接触元件可接触运输船,且在运输船沿着接触元件而在运动方向上移动的同时,通过其承载而在侦测位置中抵抗偏压。在此期间,侦测装置恒常地侦测连接元件到达或维持在侦测位置。在一实施例中,运输船可在面向装置的表面具有一凹槽。一旦此凹槽到达接触元件,由于连接元件的弹性安装,接触元件位移回到初始位置。侦测装置因此突然不再侦测侦测位置,且可接着产生一对应信号,容许推论出运输船的位置。在此情况下,可精确地确定位置,例如因为运输船上的凹槽位置为已知。上述的原理亦可应用于不具有凹槽的运输船。在此,当接触元件失去与运输船的接触时(即,一旦运输船移动经过装置),连接元件可移动回到初始位置。然而,这种变体仅可能发生在连续数个运输船之间没有直接接触的情况下。
10.连接元件(及接触元件)的初始位置可为接触元件不接触运输船的位置,即,接触元件不被运输船影响。替代地,连接元件(及接触元件)的初始位置可为接触元件已接触运输船的位置,但尚未被运输船压进侦测位置中。在此情况下,运输船可例如在面向装置的表面上具有一凸起物。一旦此突出件与接触元件接触,突出件经由接触元件将连接元件压进侦测位置中。
11.因为根据本发明的侦测上述侦测位置的到达是通过接触元件及连接元件的机械偏斜而导致,根据本发明的装置能够实质上机械地或机械地导致运输船位置的侦测。这使得可能在受真空的空间中或其他拉紧(straining)装置的环境条件下使用上述装置,且仍确保可靠的侦测。
12.上述侦测位置可在直到连接元件具有一预定最小偏斜才被视为已经到达。换句话说,侦测装置可适合用以仅在连接元件具有此预定最小偏斜时来侦测偏斜。仅在到达或超过最小偏斜时,通过侦测装置能够侦测且分辨连接元件的数个位置,且通过连接元件来界定侦测位置的到达,而可达成上述效果。替代地或附加地,可将侦测装置设计成可仅在到达最小偏斜时侦测连接元件,且因此确定已到达侦测位置。
13.举例来说,此最小偏斜可对应于可通过运输船与接触元件接触而可达成的最大偏斜。较佳地,比起此最大可达成的偏斜,最小偏斜可比其小5毫米,较佳地比其小3毫米,更佳地比其小1.5毫米,又更佳地比其小1毫米。
14.上述侦测装置可进一步地适合用于在侦测到连接元件/接触元件到达分别的侦测位置后或在侦测到通过运输船偏斜接触元件之后,产生及传递一对应信号至一控制系统。控制器可被提供作为根据本发明的装置的一构件、根据本发明的系统的一构件、或作为一分开的构件。
15.在上述装置的一实施例中,接触元件可为一接触滚子,可旋转地安装在连接元件的第一端(与弹簧安装相反的一端)。此接触滚子可通过螺栓而连接至连接元件。举例来说,接触滚子可具有一中央孔洞,且配置在连接元件的分支端部的两臂之间,螺栓被导引通过两臂各自的一孔洞。接触滚子可同时通过所接合的运输船的接触或力量而偏斜,且通过运输船的运动而旋转,容许其向上移动且导引运输船。依据装置相对于运输船进入的运动方向的配置,运输船的运动方向可维持不变或偏斜,例如偏斜90度。
16.替代地,接触元件可为一滑动杆。举例来说,滑动杆可通过螺栓或螺丝连接而附接至连接元件的第一端。在一进一步的实施例中,滑动杆可连接至两装置的至少两个连接元
件。换句话说,至少两装置可包括连接数个装置的共同滑动杆。在此情况下,接触元件可被视为共同滑动杆的一部分。滑动杆可配置以容许运输船沿着滑动杆、沿着滑动杆的至少一轴而滑动,较佳地沿着滑动杆的至少两个实质上互相正交的轴。这容许运输船与滑动杆接触,或更精确地,运输船的运动方向维持不变或偏斜,例如偏斜90度。
17.在进一步的发展中,接触元件及连接至接触元件的连接元件可配置成旋转地固定在壳体中。为此目的,举例来说,接触元件、连接元件及壳体可通过一螺栓而互连,上述螺栓延伸通过接触元件及连接元件中的孔洞,且可位移地被接收在壳体的分别有关连的开槽孔中的相反端。壳体的开槽孔可相对彼此配置,且延伸实质上平行于连接元件的纵轴。因此,开槽孔可防止接触元件及连接元件在壳体中绕着连接元件的纵轴的旋转,同时允许接触元件及连接元件沿着纵轴的位移。此位移可特别是垂直位移。上方停止件及下方停止件亦可界定接触元件及所连接的连接元件的端位置。举例来说,上方停止件可界定接触元件及连接元件偏压而至的初始位置。
18.在装置的一实施例中,连接元件可为一轴件,较佳地具有非圆形的剖面。
19.在装置的一实施例中,连接元件可具有一凹槽,一弹簧元件的至少一部分容纳在上述凹槽中,用于实施弹性安装。此凹槽可例如从连接元件的相反的一第二端(即,背向接触元件的一端)往第一端的方向延伸。上述凹槽可具有非圆形的剖面,且与连接元件同轴地配置。上述弹簧元件可为机械弹簧元件,较佳地为螺旋弹簧。这进一步提升装置在高压的环境条件下的安全使用性。上述弹簧元件可经由相对于连接元件的凹槽中的一连接元件侧停止件而支撑一端,并经由相对于壳体的一壳体侧停止件而支撑一相反端。上述停止件形成为彼此相对。弹簧元件可与连接元件同轴地配置。
20.在根据本发明的进一步实施例中,连接元件可包括背向接触元件的一端部,在连接元件到达侦测位置时,上述端部被侦测装置侦测。据此,上述端部可形成在第二端,也就是连接元件中远离接触元件的一端。举例来说,当端部已到达及/或超过预定的限制点时,上述端部可被侦测装置侦测或为可侦测的。
21.特别是,连接元件背向接触元件的端部可包括一斜面。举例来说,端部可为连接元件尾端的倒角,特别是在连接元件为轴件形式的情况下。
22.在一实施例中,壳体可具有实质上圆柱形的形状。在此情况下,壳体可较佳地为袖状。导引连接元件的壳体的导引件可通过袖状壳体的内周表面的一部分而形成。替代地,可在壳体的内周表面的一部分上提供一滑动导引件,例如为进一步压入的金属或塑胶袖的形式。
23.在装置的进一步实施例中,壳体可包括一凸缘,通过上述凸缘,装置以一密封方式可连接或连接至一关联邻接设施的一受真空部分或区域。此凸缘可形成在壳体外周的周围,上述壳体以实质上圆柱形的形状形成。在此情况下,凸缘可具有圆环形状且与壳体同轴。
24.上述壳体可以一体形成或以多个部件形成。
25.在一实施例中,根据本发明的装置,特别是壳体,可包括一固定停止部,用以机械固定运输船的端位置。当在待侦测的运输船的方向上的连接元件的初始位置观察时,接触元件,更具体的是接触元件的上端,可向外延伸超过固定停止部一预定距离。此外,从待侦测的运输船的方向上观察,当连接元件在侦测位置时,接触元件,更具体的是接触元件的上
端,可最大程度地与固定停止部对齐或在固定停止部后方。接触元件的上端可当作接触元件在远离弹簧安装的方向上间隔最远的点。应了解的是,在一旋转接触滚子的情况下,上端总是当作滚子在远离弹簧安装的方向上间隔最远的点。
26.用于机械固定运输船的端位置的固定停止件确保在故障事件(例如:若侦测装置除了连接元件到达侦测位置之外没有侦测到任何东西)中,不会产生信号及/或维持在侦测位置中,运输船抵抗偏压的运动是被固定停止件所限制。此外,运输船可沿着固定停止件滑动,且虽然侦测被限制,但制程并不需被干扰。这可有利于多工实施的设施。
27.上述预定距离可为例如:最大1厘米、较佳地最大7毫米、较佳地最大5毫米、又更佳地最大3毫米。小距离是有利的,因为运输船的位置在故障事件中只会不显著地改变,这是由于运输船与固定停止件接触。
28.在进一步的实施例中,壳体可具有一袖状端部,包含形成固定停止部的一端表面。固定停止部因此可具有环状剖面。举例来说,比起壳体的其余部分,袖状端部可为薄壁,弹性安装的构件及侦测装置是配置在袖状端部中。特别是,袖状端部可在远离弹簧安装的方向上从凸缘延伸。
29.在根据本发明的装置的一实施例中,侦测装置可包括一非接触感测器及/或一位置开关,特别是一机械限制开关。据此,侦测装置可包括一或多个相同或相异的感测器。上述感测器可整合且排列在壳体中,以侦测配置在壳体中的连接元件的位置。
30.举例来说,非接触感测器可为感应感测器。这可在背向接触元件的连接元件的端部(例如:包括一斜面)移动至感应感测器的量测场中时,侦测到达侦测位置。上述侦测位置可通过感应感测器的配置或其量测场以及相对的连接元件的配置来界定。
31.机械限制开关可整合且排列在壳体中,使得机械限制开关是通过移动连接元件来启动,且借此导致连接元件中远离接触元件的端部的斜面与机械限制开关接触。应了解的是,机械限制开关没有完全启动且侦测到达侦测位置,直到斜面位移足够远。举例来说,可意指机械限制开关没有完全启动且侦测到达侦测位置,直到包括斜面的连接元件的端部已经位移经过机械限制开关,使得机械限制开关与连接元件中贴近端部的部分接触。
32.感应感测器及机械限制开关具有低磨耗,且适合用于受真空的空间或其他装置受压的环境条件,并仍提供装置的可靠操作。
33.本发明进一步有关于一种用于侦测及导引运输船的系统。上述系统包括至少一上述种类的装置以及在运动或回复方向上移动的至少一运输船。上述至少一运输船在面向装置的表面为平面,包括一凹槽,及/或包括一突出件。应了解的是上述系统可包括数个与上述种类相同或相异的装置。并且,上述系统可包括多个运输船。
34.在系统的进一步实施例中,上述至少一装置可配置成正交于至少一运输船的运动方向。举例来说,上述至少一装置可因此与至少一运输船的下方侧接触。
35.替代地或附加地,上述种类的至少一或多个装置可配置在至少一运输船的运动方向上。举例来说,在运动方向上观察时,至少一装置可因此与运输船的横向或前端面接触。
36.在系统的一实施例中,上述至少一装置可配置在至少一运输船的运动路径上,使得装置不会影响运动方向,或者使得装置改变运输船的运动方向(例如:将其偏斜90度)。上述至少一装置可因此用来导引至少一运输船,同时侦测其位置。
37.在进一步的实施例中,系统可包括一控制器。在侦测到连接元件到达各自的侦测
位置之后,侦测装置可适合用以产生及传递一对应信号至控制器。控制器可适合用以将此信号设定与暂存参数及/或储存的参数关联,例如:装置在系统中的位置或运输船的几何形状,且由此准确地确定运输船的位置。并且,根据所确定的运输船的位置或根据从侦测装置接收的信号,控制器可调整运输船移动的移动速度。
38.本发明更有关于一种用于侦测运输船的方法。特别是,可通过上述种类的装置或系统来执行的方法。上述方法包括以下步骤:
39.‑
通过一运输船来接触一接触元件,
40.‑
偏斜连接至接触元件的一弹性安装的连接元件,抵抗偏压而从一初始位置至一侦测位置,
41.‑
通过一侦测装置侦测连接元件到达该侦测位置。
42.应了解的是,偏斜连接至接触元件的弹性安装的连接元件,抵抗偏压而从一初始位置至一侦测位置,是通过运输船接触接触元件而导致。
43.上述方法可更包括以下步骤:由于弹性安装所导致的偏压,将连接元件(及所连接的接触元件)从侦测位置转移回到初始位置。上述回复转移可在一旦接触元件及运输船之间不再接触时发生。
44.前述步骤以及由前述内容引发的步骤可重复及执行数次。
45.虽然在上文及下文中,仅参照用于侦测运输船的装置来描述一些型态及特征,这些型态及特征可准用于用以侦测运输船的系统及/或方法,反之亦然。
46.附图简单说明
47.本发明的范例实施例将在以下参照随附示意附图更加详述。呈现:
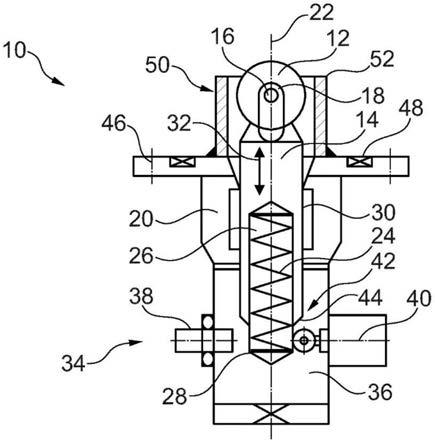
48.图1根据本发明一实施例范例,用于侦测运输船的装置的横向剖面图。
49.图2根据本发明,系统的实施例范例的简化侧视图,绘示装置相对于运输船的一第一配置。
50.图3根据本发明,系统的另一实施例范例的简化上视图,绘示装置相对于运输船的一第二配置。
51.图4根据本发明,系统的又另一实施例范例的简化上视图,绘示装置相对于运输船的一第三配置。
附图说明
52.在附图中相同的元件符号是指示相同或类似的元件。
53.图1显示装置10的一实施例范例,装置10具有一接触元件12,用于接触一运输船(图1未示)。在所示的范例中,接触元件12形成为一接触滚子。接触元件12可旋转地附接至装置10的一连接元件14的一上端,且因此连接至连接元件14。为此目的,一螺栓16通过接触元件12及连接元件14中关联的数个孔洞。此螺栓16的尾端是在形成在装置10的壳体20中的分别开槽孔18中的两侧。由于螺栓16配置在开槽孔中的两端面向彼此(图1中仅指示一开槽孔18),接触元件12及所连接的连接元件14是相对于连接元件14的纵轴22而旋转地固定在壳体20中。
54.连接元件14为轴件形式,且通过金属螺旋弹簧24而弹性安装在壳体20中。为此目的,螺旋弹簧24部分容纳在连接元件14的一凹槽26中。从连接元件14背向接触元件12的一
端开始,凹槽26往接触元件12的方向而向上延伸。螺旋弹簧24的下端部是抵靠一内壳体停止部28来支撑。螺旋弹簧24将连接元件14及所连接的接触元件12偏压至图1所示的初始位置。在此初始位置中,接触元件12没有接触任何运输船。
55.连接元件14与圆柱形壳体20实质上同轴地配置在壳体20内,且线性可位移地经由壳体20的导引件30而沿着纵轴22导引,如双箭头32所示。开槽孔18确保连接元件14及接触元件12在双箭头32方向上的位移是可能的,即使是反旋转装置,螺栓16的端部是支持在上述开槽孔18中。在所示的范例中,接触元件12及连接元件14的组件理论上最大的可位移度是通过开槽孔18的上端及下端和螺栓16分别抵靠上述端部的抵接而决定。
56.接触元件12及连接元件14利用它们之间的互连而可共同位移,借此,运输船(图1未示)与接触元件12的接触导致连接元件14的偏斜,抵抗螺旋弹簧24的偏压而从初始位置至侦测位置。
57.如在图1进一步可见,装置包括一侦测装置34,适合用以侦测连接元件14到达侦测位置。侦测装置34配置在壳体20的下方区域中。在所示的实施例范例中,壳体20的下方区域为袖(sleeve)或槽体(pot)36的形式。此槽体36固定地且密封地连接至贴近壳体20、包括导引件30的部分。
58.在所示的实施例范例中,侦测装置34包括两个感测器,也就是非接触感应感测器38及机械限制开关40。应了解的是,在替代的实施例范例中,侦测装置可仅包括一感测器或两个相同种类的感测器。而且,侦测装置可包括超过两个感测器。
59.感应感测器38从外部附接至槽体36,且机械限制开关40整合在槽体36中,使得当连接元件14到达预定的侦测位置时,连接元件14背向接触元件的一端部42被两个感测器38、40侦测。在所示的实施例范例中,背向接触元件的连接元件14的端部42为封闭连接元件14的倒角形式。端部42因此包括所示的斜面44。
60.如从图1可见,当端部42或斜面44移动至感应感测器38的量测场中时,感应感测器38可侦测连接元件14到达侦测位置。进一步地,机械限制开关40可通过位移连接元件14而启动,借此导致斜面44接触机械限制开关40。
61.由于连接元件14经由接触元件12而从初始位置到侦测位置的位移,是通过作用于其上的运输船抵抗偏压而导致,运输船的位置可借此侦测。举例来说,可为此目的而得知装置10在整体系统中的确切位置。为此,图1所示的装置10可经由设置在壳体20上的一凸缘46而连接或变成连接到设施壁。更精确地,装置10例如经由凸缘46而栓锁或可栓锁至设施壁。为了确保设施及装置10之间的紧密连接,一圆周密封件48设置在凸缘46中,例如以一o型环配置在沟槽中的形式。
62.一旦侦测到连接元件14到达预定的侦测位置,侦测装置34可产生且传递一对应信号至一控制器(图未示)。控制器可将此信号与暂存参数及/或储存的参数关联,例如:装置10在整体系统中的位置或运输船的几何形状,且用此准确地确定运输船的位置。并且,根据先前所确定的运输船的位置或根据从侦测装置34接收的信号,控制系统可改变运输船移动的移动速度。
63.为了增加整体系统或所执行的制程在故障事件中的安全性,所绘示的装置10包含一固定停止部,用以机械固定运输船的端位置。为此目的,壳体20包括袖状的上方端部50,包括形成固定停止部的一端面52。用于机械固定运输船的端位置的固定停止部52使得,例
如,即使连接元件14到达侦测位置及/或连接元件14维持在侦测位置,若侦测装置34没有产生信号,运输船抵抗偏压的移动仍可通过固定停止部52限制。此外,运输船可沿着固定停止部52滑动,且制程并不须被干扰,即使侦测有所限制。
64.在所示的实施例范例中,在连接元件14的初始位置中(图1),接触元件12的一上端向外突出超过固定停止部52一预定距离约3毫米。在连接元件14的侦测位置中(图未示),接触元件12的上端最大程度地对齐固定停止部52。
65.图2显示系统60的一实施例范例,包括一装置10及两个互连的运输船62、64。在图2所示的配置中,装置10配置成正交于运输船62、64的运动方向br,且在运输船62、64下方。
66.在所示的范例中,运输船62、64在下方侧包括一凹槽66。只要运输船62、64的下方侧接触装置10的接触元件12,连接元件14因为通过运输船62、64施加的力而在侦测位置中。一旦接触元件12进入凹槽66的区域,因为通过螺旋弹簧施加的偏压,连接元件14转换到初始位置。这个从侦测位置到初始位置的改变是通过一控制系统侦测,因为侦测装置34在此时不再产生信号或侦测侦测位置。这容许侦测两运输船的确切位置。
67.图3显示另一实施例范例的系统70,包含两个装置10及两个互连的运输船62、64。在此范例中,两个装置10配置在运输船62、64的运动方向br上。如此一来,两个装置10或其接触元件与两运输船62、64前端的前端表面接触。此接触导致两装置10各自的连接元件从初始位置位移至侦测位置,借此可侦测运输船的位置。在此同时,装置10在此作用为导引运输船62、64,更精确地用于将它们的运动方向br偏斜90度。
68.图4显示另一实施例范例的系统80,包含两个装置10及一运输船62。装置10经由设置在各自壳体上的凸缘46而连接至一设施壁82。在图4的范例中,两装置10亦配置在运输船62的运动方向br上。如此一来,两装置10或其接触元件与运输船62的横向端表面接触。此接触导致两装置10各自的连接元件从初始位置位移至侦测位置,借此可侦测运输船的位置。
69.在此同时,亦在此实施例范例中,装置10作用为导引运输船62,更精确地用于将它的运动方向br偏斜90度。与根据图3的范例相反,两个装置10包括一共同滑动杆作为接触元件12。滑动杆容许运输船62沿着滑动杆的两个实质上正交的轴而滑动。这容许与滑动杆接触的运输船62在两个不同方向上偏斜运动方向90度(在图4中,出纸面或入纸面、或向右或向左)。
70.亦应了解的是,以上所述实施例范例的进一步结合是可能的,例如系统60、70及/或80的不同结合。
71.符号说明
72.10装置
73.12接触元件
74.14连接元件
75.16螺栓
76.18开槽孔
77.20壳体
78.22连接元件的纵轴
79.24螺旋弹簧
80.26连接元件凹槽
81.28壳体停止部
82.30导引件
83.32位移方向
84.34侦测装置
85.36槽体
86.38感应感测器
87.40机械限制开关
88.42连接元件的端部
89.44斜面
90.46凸缘
91.48密封件
92.50壳体的上方端部
93.52固定停止部
94.60第一实施例的系统
95.62运输船
96.64运输船
97.66运输船的凹槽
98.70第二实施例的系统
99.80第三实施例的系统
100.82设施壁
101.br运动方向
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。