1.本发明的多个实施例涉及杯清洗装置及其工作方法。
背景技术:
2.通常,形成于半导体基板上的多个图案可通过光刻(photolithography)工艺来形成。这种工艺可包括光刻胶涂敷工序、曝光工序、显影工序以及清洗工序等。
3.通常,清洗工序可通过枚叶式清洗装置(single cleaning)来进行。枚叶式清洗装置可包括:旋转夹头(spin chuck),用于固定晶圆;化学喷嘴(nozzle),用于向晶圆供给化学物质(chemical);杯(cup)(或处理杯(processing cup)),包围旋转夹头并与下部的废液通道及排气管相连接。
4.本发明的背景技术公开在韩国公开专利第2019
‑
0007198号(2019年01月22日公开,名称:包括处理杯的杯清洗装置)。
技术实现要素:
5.本发明的多个实施例公开了对回收在半导体制造工艺中的清洗工序中为了进行晶圆处理而喷射的化学物质的多个杯及废气中所存在的化学物质进行去除的方法及装置。
6.本发明多个实施例的杯清洗装置包括:位置调整装置;阀门;存储器;以及处理器,与所述位置调整装置、所述阀门以及所述存储器相连接,所述处理器使装载晶圆的操作台装置进行旋转,在通过所述位置调整装置调整回收化学物质的多个杯的位置的期间,控制所述阀门喷射用于对所述多个杯进行清洗的清洗物质,若从喷射所述清洗物质的时间点开始经过预设时间,则控制所述阀门不喷射所述清洗物质。
7.根据多个实施例,作为控制所述阀门喷射所述清洗物质的动作的至少一部分,所述处理器根据从所述存储器加载的杯清洗程序信息识别第一杯位置信息,基于所述第一杯位置信息控制所述位置调整装置来调整所述多个杯的位置,之后控制所述阀门喷射所述清洗物质。
8.根据多个实施例,所述杯清洗装置还可包括:前喷嘴(front nozzle),向所述晶圆的上端部喷射清洗物质;后喷嘴(back nozzle),向所述晶圆的下端部喷射清洗物质;第一清洗喷嘴,向包围使所述操作台装置旋转的轴(spindle)的外壳(housing)的至少一部分喷射清洗物质;以及多个第二清洗喷嘴(clean nozzle),向所述杯的下端部喷射清洗物质。
9.根据多个实施例,所述多个第二清洗喷嘴可包括:用于对所述位置调整装置的一部分进行清洗的至少一个清洗喷嘴;用于对所述多个杯的下端部进行清洗的至少一个清洗喷嘴;以及用于对排水口的至少一部分进行清洗的至少一个清洗喷嘴。
10.根据多个实施例,用于对所述位置调整装置的一部分进行清洗的至少一个清洗喷嘴以第一压力喷射清洗物质,用于对所述多个杯的下端部进行清洗的至少一个清洗喷嘴以低于所述第一压力的第二压力喷射清洗物质。
11.根据多个实施例,所述处理器根据杯清洗程序信息识别清洗程序的执行时间,若
processor))。
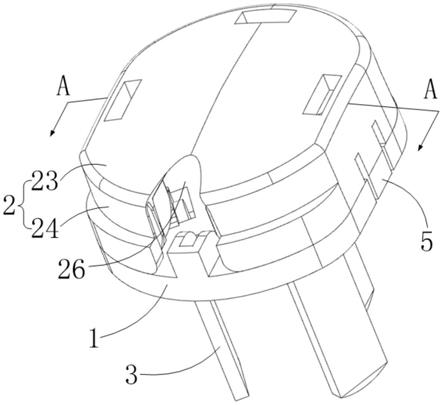
24.图1a为简要示出多个实施例的电子装置的结构的例示图。
25.参照图1a,杯清洗装置10可包括操作台装置11、轴12、外壳13、多个杯14以及位置调整装置15。根据一实施例,可将晶圆或清洗晶圆装载(load)于操作台装置11。轴12可使操作台装置11旋转。外壳13能够构成为包围轴12的至少一部分。多个杯14可回收向晶圆喷射的化学物质(或清洗物质)。位置调整装置15可调整多个杯14的位置,可包括液压缸(hydraulic cylinder)、气缸(pneumatic cylinder)或马达。操作台装置11及多个杯14可被称作杯清洗装置10的上端部20。外壳13以及位置调整装置15可被称作杯清洗装置10的下端部30。杯清洗装置10的下端部30还可包括用于排出化学物质和/或清洗物质的排水口。
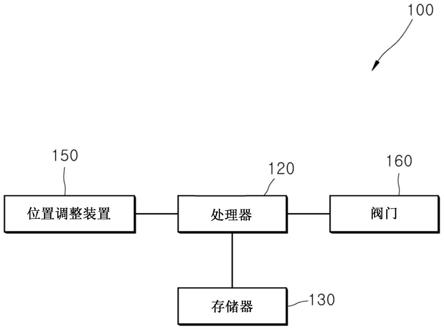
26.图1b为多个实施例的电子装置的框图。图2为用于对在多个实施例的电子装置中调节杯的高度的方法进行说明的例示图。图3为用于对在多个实施例的电子装置中清洗杯的方法进行说明的例示图。图4a至图4b为用于对在多个实施例的电子装置中清洗杯下端部的方法的一例进行说明的例示图。图5为用于对在多个实施例的电子装置中清洗杯下端部的方法的其他例进行说明的例示图。
27.参照图1b至图5,杯清洗装置100可包括处理器120、存储器130、位置调整装置150以及阀门160。但是,并不限定于此。例如,杯清洗装置100还可包括用于接收输入的输入装置、用于输出信息的输出装置以及用于与外部电子装置进行数据通信的通信电路中的至少一部分。
28.根据多个实施例,处理器120可通过驱动操作系统或应用程序来控制与处理器120相连接的多个硬件结构要素或软件结构要素,可执行各种数据处理及运算。根据一实施例,处理器120可由片上系统(soc,system on chip)来实现。处理器120可向存储器130加载(load)从其他结构要素中的至少一个所接收的指令(instruction)或数据并进行处理,可将多种数据存储于存储器130。
29.根据多个实施例,若开始进行清洗工序,则处理器120基于杯清洗程序信息来使得操作台装置(例如:图1a中的操作台装置11)按规定速度进行旋转。例如,若开始进行清洗工序,则处理器120判断清洗晶圆(cleaning wafer)是否装载于操作台装置(或夹头操作台装置),若判断为清洗晶圆装载于操作台装置,则根据杯清洗程序信息识别预设速度(例如:预设rpm),从而可使得操作台按所识别到的速度进行旋转。并且,例如,若开始进行杯清洗程序,则处理器120根据杯清洗程序信息识别预设速度,从而可使得装载有晶圆的操作台装置(或夹头操作台装置)按所识别到的速度进行旋转。若开始进行杯清洗程序,则处理器120可通过从存储器130加载杯清洗程序信息来获取杯清洗程序信息。
30.根据多个实施例,若操作台装置进行旋转,则处理器120能够基于杯清洗程序信息来控制位置调整装置150(例如:图1a中的位置调整装置15)以调整多个杯的位置。具体地,处理器120可根据杯清洗程序信息识别用于调整杯的位置的第一杯位置信息,能够基于第一杯位置信息来控制位置调整装置150以调整杯的位置。例如,如图2所示,处理器120能够基于第一杯位置信息以使位于起始位置200的多个杯201、203、205向台部的位置(例如:第一台部210、第二台部220或第三台部230)移动的方式来控制位置调整装置150。在其他例中,如图2所示,处理器120能够基于第一杯位置信息以使位于台部的位置(例如:第一台部210、第二台部220或第三台部230)的多个杯201、203、205向其他台部的位置(第一台部210、
第二台部220或第三台部230)移动的方式来控制位置调整装置150。根据一实施例,杯的位置信息可根据清洗工序程序的效率或管理人员的设定来改变。
31.根据多个实施例,处理器120响应于多个杯307的位置已被调整这一情况,控制阀门160以对杯清洗装置100的上端部(例如:图1a中的杯清洗装置10的上端部20)进行清洗。例如,如图3所示,处理器120能够以使前喷嘴301向清洗晶圆305的上端移动并通过前喷嘴301和后喷嘴303供给清洗物质的方式控制阀门160。通过前喷嘴301供给的清洗物质向清洗晶圆305的上端喷射,通过后喷嘴303供给的清洗物质向清洗晶圆305的下端喷射。向清洗晶圆305喷射的清洗物质由于清洗晶圆的旋转而向周边飞散,包围着清洗晶圆的周边的多个杯307可通过飞散的清洗物质而被清洗。
32.根据多个实施例,处理器120响应于多个杯307的位置已被调整这一情况,控制阀门160以对杯清洗装置100的下端部(例如:图1a中的杯清洗装置10的下端部30)进行清洗。例如,如图4a所示,处理器120响应于多个杯的位置已被调整这一情况,以使通过在包围着轴的外壳(例如:图1a中的外壳13)所配置的清洗喷嘴401、403、405喷射清洗物质的方式控制阀门160。
33.清洗物质通过清洗喷嘴401、403、405而向用于调整杯的位置的装置407及包围着装置407的外壳409喷射,由此,可对用于调整杯的位置的装置407及包围着装置407的外壳409进行清洗。如图4b中的状态451所示,清洗喷嘴401、403、405中的一部分以清洗杯的下端部(例如:杯的下端部)的方式喷射清洗物质,如状态453所示,清洗喷嘴401、403、405中的其他一部分以清洗位置调整装置407及外壳409的至少一部分的方式喷射清洗物质,如状态455所示,洗喷嘴401、403、405中的剩余一部分以清洗排水口及外壳409的至少一部分的方式喷射清洗物质。其中,清洗喷嘴401、403、405中的向位置调整装置407喷射清洗物质的至少一个清洗喷嘴以第一压力喷射清洗物质,向外壳409喷射清洗物质的至少一个清洗喷嘴以低于第一压力的第二压力喷射清洗物质。在图4a中,示出了3个清洗喷嘴401、403、405,但这仅属于一例,可根据需要或实验结果来调整清洗喷嘴的数量。
34.根据多个实施例,处理器120响应于多个杯307的位置已被调整这一情况,控制阀门160以对杯清洗装置100的下端部(例如:图1a中的杯清洗装置10的下端部30)进行清洗。例如,如图5所示,处理器120可通过在包围着用于使晶圆旋转的轴(例如:图1a中的轴12)的外壳501(例如:图1a中的外壳13)的一部分所配置的清洗喷嘴503喷射清洗物质,从而对外壳501进行清洗。
35.根据多个实施例,处理器120可在喷射清洗物质的期间基于第一杯位置信息持续调整杯的位置。例如,如图2所示,若从在多个杯201、203、205的位置处于台部210、220、230的位置的状态下喷射清洗物质开始经过规定时间,则处理器120以将多个杯201、203、205的位置调整到其他台部210、220、230的方式控制位置调整装置150。在其他例中,若从在多个杯201、203、205的位置处于台部210、220、230的位置的状态下喷射清洗物质开始经过规定时间,则处理器120以将多个杯201、203、205的位置调整到起始位置200的方式控制位置调整装置150。根据一实施例,可根据需要或管理人员的设定来以其他值调整杯的位置的调整次数和/或杯的位置的调整时间。
36.根据多个实施例,若清洗程序结束,则处理器120可进行干燥程序。例如,处理器120控制阀门160以喷射用于对清洗物质进行干燥的干燥物质。例如,若从执行清洗程序的
时间点开始经过规定时间,则处理器120以向清洗晶圆的上端喷射干燥物质的方式控制阀门160。根据一实施例,处理器120可根据杯清洗程序信息识别用于对杯的位置进行调整的第二杯位置信息,在喷射干燥物质的期间基于第二杯位置信息控制位置调整装置150以调整多个杯的位置。
37.根据多个实施例,若干燥程序结束,则处理器120可从操作台装置卸载(unload)清洗晶圆。例如,若从执行干燥程序的时间点开始经过规定时间,则处理器120以不喷射干燥物质的方式控制阀门160,可从操作台装置卸载清洗晶圆。
38.根据多个实施例,位置调整装置150可基于处理器120的控制来调整用于对在半导体制造工艺中所使用的化学物质进行回收的多个杯的位置。根据一实施例,位置调整装置150可由液压缸、气缸或马达构成。
39.根据多个实施例,阀门160可根据处理器120的控制来向相关喷嘴供给用于清洗程序的清洗物质以及用于干燥程序的干燥物质。
40.以上,假设用于半导体制造工艺的杯的数量为3个(例如:第一杯、第二杯以及第三杯)来进行了说明,但本发明并不限定于此。例如,用于半导体制造工艺的杯的数量可多于3个或可少于3个,在每个情况下,均可通过与上述内容相同或相似的方法调整杯的位置。
41.如上所述,杯清洗装置100可通过对回收在进行清洗工序的过程中为了进行晶圆处理而喷射的化学物质的多个杯的位置进行单独调整,来有效去除在各个杯的内部所存在的化学物质。
42.图6为用于对在多个实施例的电子装置中清洗多个杯的方法进行说明的流程图。
43.参照图6,在步骤601中,杯清洗装置(例如:图1a中的杯清洗装置10或图1b中的杯清洗装置100)的处理器(例如:图1b中的处理器120)可将晶圆(或清洗晶圆)装载于操作台装置(例如:图1a中的操作台装置11)。
44.在步骤603中,处理器120响应于晶圆装载于操作台装置这一情况,使操作台装置按规定速度进行旋转。例如,处理器120可根据从存储器130加载的杯清洗程序信息获取使操作台装置旋转的速度信息,基于所获取的速度信息来使操作台装置进行旋转。
45.在步骤605中,处理器120可在调整杯的位置的期间执行清洗程序。例如,处理器120可基于根据杯清洗程序信息识别的第一杯位置信息来控制位置调整装置150,控制阀门160以喷射用于对粘在杯清洗装置100的上端部(例如:图1a中的上端部20)及杯清洗装置100的下端部(例如:图1a中的下端部30)的化学物质进行清洗的清洗物质。根据一实施例,处理器120可根据杯清洗程序信息确认清洗程序的执行时间,若从执行清洗程序的时间点开始经过清洗程序的执行时间,则可结束清洗程序。例如,若从执行清洗程序的时间点开始经过清洗程序的执行时间,则处理器120控制阀门160以使得不喷射清洗物质。在其他例中,若从执行清洗程序的时间点开始经过清洗程序的执行时间,则处理器120控制阀门160以使得不喷射清洗物质,控制位置调整装置150以使得多个杯位于起始位置(例如:图2中的起始位置200)。
46.在步骤607中,处理器120可在调整杯的位置的期间执行干燥程序。例如,处理器120响应于清洗程序结束这一情况,控制阀门160以喷射用于对清洗物质进行干燥的干燥物质,根据杯清洗程序信息识别用于对杯的位置进行调整的第二杯位置信息,基于第二杯位置信息控制位置调整装置150以调整多个杯的位置。根据一实施例,处理器120根据杯清洗
程序信息确认干燥程序的执行时间,若从执行干燥程序的时间点开始经过干燥程序的执行时间,则可结束干燥程序。例如,若从执行干燥程序的时间点开始经过干燥程序的执行时间,则处理器120控制阀门160以使得不喷射干燥物质。在其他例中,若从执行干燥程序的时间点开始经过干燥程序的执行时间,则处理器120控制阀门160以使得不喷射干燥物质,控制位置调整装置150以使得多个杯位于起始位置(例如:图2中的起始位置200)。
47.在步骤609中,处理器120可卸载晶圆。例如,处理器120响应于干燥程序结束这一情况,使操作台装置停止旋转,通过从操作台装置卸载晶圆来结束清洗工序。
48.以上,对在杯清洗装置100将清洗晶圆装载于操作台装置之后使操作台装置按规定速度进行旋转的情况进行了说明,但根据本发明的多个实施例,杯清洗装置100还可省略将清洗晶圆装载于操作台装置的步骤而使操作台装置按规定速度进行旋转。
49.如上所述,杯清洗装置100可通过对回收在进行清洗工序的过程中为了进行晶圆处理而喷射的化学物质的多个杯的位置进行单独调整,来有效去除在各个杯的内部所存在的化学物质。
50.本说明书中的多个实施例可通过包含存储于设备(machine)(例如:图1b中的杯清洗装置100)可读存储介质(storage medium)(例如:图1b中的存储器130)中的一个以上的指令(instructions)的软件来实现。例如,设备(例如:图1b中的杯清洗装置100)的处理器(例如:图1b中的处理器120)可从存储介质调取已存储的一个以上的指令中的至少一个指令,并执行该指令。这可实现根据所调取的至少一个指令来使得设备执行至少一个功能。一个以上的指令可包含通过编码器生成的代码或可通过解释器运行的代码。设备可读存储介质可形成为非暂时性(non
‑
transitory)存储介质的形态。其中,“非暂时性”仅意味着存储介质为实际存在(tangible)的装置且不包含信号(signal)(例如:电磁波),该术语并不区分半永久性地存储于存储介质的情况和临时存储的情况。
51.根据多个实施例,以上所述的结构要素的各个结构要素(例如:模块或程序)可包含单个或多个个体。根据多个实施例,以上所述的多个结构要素中的一个以上的结构要素或动作可被省略,或者可增加一个以上的其他结构要素或动作。代替性或追加性地,多个结构要素(例如:模块或程序)可被整合成一个结构要素。在此情况下,整合后的结构要素能够以与进行所述整合之前的所述多个结构要素中的相应结构要素所执行的功能相同或相似的方式执行所述多个结构要素中的各个结构要素的一个以上的功能。根据多个实施例,可按顺序、并列、反复或启发式地执行由模块、程序或其他结构要素执行的多个动作,所述多个动作中的一个以上可按其他顺序执行或被省略,或者可增加一个以上的其他动作。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。